Кулачкового и плоского контроллера.
Контроллером называется многоступенчатый, многоцепной аппарат с ручным управлением, предназначенный для изменения схемы главной цепи двигателя или цепи возбуждения. Кроме того, контроллеры также применяются для изменения сопротивлений, включенных в эти цепи. По своему конструктивному исполнению контроллеры делятся на барабанные, кулачковые и плоские.
Барабанные контроллеры.На рис.1 показан контактный элемент барабанного контроллера. На валу 1 укреплён сегментодержатель 2 с подвижным контактом в виде сегмента 3. Сегментодержатель изолирован от вала изоляцией 4. Неподвижный контакт 5 расположен на изолированной рейке 6. При вращении вала 1 сегмент 3 набегает на неподвижный контакт 5, чем осуществляется замыкание цепи. Необходимое контактное нажатие обеспечивается пружиной 7. Вдоль вала расположено большое число контактных элементов. На одном валу устанавливается ряд таких контактных элементов. Сегментодержатели соседних контактных элементов можно соединять между собой в различных необходимых комбинациях. Определенная последовательность замыкания различных контактных элементов обеспечивается различной длиной их сегментов.
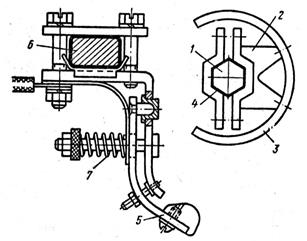
Рис.1. Контактный элемент барабанного контроллера.
Кулачковые контроллеры. В кулачковом контроллере переменного тока (рис.2) перекатывающийся подвижный контакт 1 имеет возможность вращаться относительно центра О2, расположенного на контактном рычаге 2. Контактный рычаг 2 поворачивается относительно центра O1. Контакт 1 замыкается с неподвижным контактом 3 и соединяется с выходным контактом с помощью гибкой связи 4. Замыкание контактов 1,3 и необходимое контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 5 на контактный рычаг. При этом сжимается пружина 5 и контакты /, 3 размыкаются. Момент включения и отключения контактов зависит от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ-60 %. В контроллер входят два комплекта контактных элементов / и //, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко сократить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала. Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В них устанавливаются только дугостойкие асбестоцементные перегородки 10. Контроллеры постоянного тока имеют дугогасительное устройство, аналогичное применяемому в контакторах.
Выключение рассмотренного контроллера происходит при воздействии на рукоятку и передаче этого воздействия через кулачковую шайбу, включение происходит с помощью силы пружины 5 при соответствующем положении рукоятки. Поэтому контакты удается развести даже в случае их сваривания. Недостаток конструкции заключается в большом моменте на валу за счет включающих пружин при значительном числе контактных элементов. Надо отметить, что возможны и другие конструктивные решения привода контактов контроллера.

Рис.2. Кулачковый контроллер.
Плоские контроллеры. Для плавного регулирования поля возбуждения крупных генераторов и для пуска в ход и регулирования частоты вращения больших двигателей необходимо иметь большое число ступеней. Применение кулачковых контроллеров здесь нецелесообразно, так как большое число ступеней ведет к резкому возрастанию габаритов аппарата. Число операций в час при регулировании и пуске невелико (10—12). Поэтому особых требований к контроллеру с точки зрения износостойкости не предъявляется. В этом случае широкое распространение получили плоские контроллеры.
На рис.3 показан общий вид плоского контроллера для регулирования возбуждения. Неподвижные контакты 1, имеющие форму призмы, укреплены на изоляционной плите 2, являющейся основанием контроллера. Расположение неподвижных контактов по линии дает возможность иметь большое число ступеней. При той же длине контроллера число ступеней может быть увеличено путем применения параллельного ряда контактов, сдвинутого относительно первого ряда. При сдвиге на полшага число ступеней удваивается. Подвижный контакт выполнен в виде медной щетки. Щетка располагается в траверсе 3 и изолируется от нее. Нажатие создается цилиндрической пружиной. Передача тока с контактной щетки 4 на выходной зажим осуществляется с помощью токосъемной щетки и токосъемной шипы 5. Контроллер рис.3 может одновременно производить переключения в трех независимых цепях. Траверса перемещается с помощью двух винтов 6, приводимых в движение вспомогательным двигателем 7. При наладочных работах перемещение траверсы вручную производится рукояткой 8. В конечных положениях траверса воздействует на конечные выключатели 9, которые останавливают двигатель. Для того чтобы иметь возможность точной остановки контактов на желаемой позиции, скорость движения контактов берется малой: (5—7)10-3 м/с, а двигатель должен иметь торможение. Плоский контроллер может иметь и ручной привод.

Рис.3. Плоский контроллер.
Преимущества и недостатки разных типов контроллеров.
Дата добавления: 2016-07-05; просмотров: 2303;
Поиск по сайту
Узнать еще
- Взаимосвязь угла давления и размеров кулачкового механизма.
- Визначення основних розмірів кулачкового механізму
- Диференціальні рівняння плоского руху твердого тіла
- Дифференциальные уравнения плоского движения твердого тела
- ИССЛЕДОВАНИЕ ПЛОСКОГО НАПРЯЖЕННОГО
- ИССЛЕДОВАНИЕ ПЛОСКОГО НАПРЯЖЕННОГО СОСТОЯНИЯ. ПРОВЕРКА ПРОЧНОСТИ ДЛЯ СЛОЖНОГО НАПРЯЖЕННОГО СОСТОЯНИЯ
- Лекция №10. Пространство ввода/вывода микроконтроллера.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
