Зависимость между главными моментами системы сил относительно двух центров приведения.
44) Инварианты системы сил. Частные случаи приведения.
Инварианты в статике, такие величины, для рассматриваемой системы сил, которые не изменяются при изменении центра приведения.
Виды инвариантов:
1) Векторный инвариант - главный вектор системы сил (R);
2) Скалярный инвариант.
L0 * R = L01 * R
L01 = L0 + O1O * R
L01 * R = L0 * R + (O1O * R) * R = L0*R + (R * R) * O1O
L01 * R = L0 * R
Скалярное произведение главного вектора на главный момент не зависит от центра приведения.
L01 * R * cosα = L0 * R * cosα
L01 * cosα = L0 * cosα
Проекция главного момента на шлавный вектор не зависит от центра приведения.
Частные случаи приведения системы сил:
1) Приведение к паре сил.
В этом случае система сил приводится к одной паре.
R0 = R = 0
L01 = L0 + O1O * R
2) Приведение к равнодействующей.
а) Если L0 = 0, то R = R*.
Линия действия проходит через центр приведения.
б) Если R≠0 , L0≠0, но R перпендикулярен L0.
OY перпендикулярен (L0,R)
d= L0 / R = OO1
| M01(R) | = d * R = L0
Отбросим (L,M0(R)), т.к. ~0 и останется R*.
Плоская система сил всегда может быть приведена к равнодействующей.
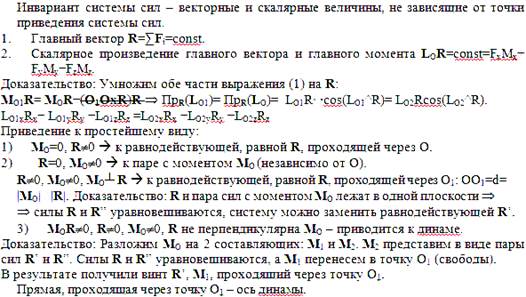
3) Приведение к динамическому винту (к динаме).
Динамический винт - такая совокупность главного момента и главного вектора, когда векторы параллельны.
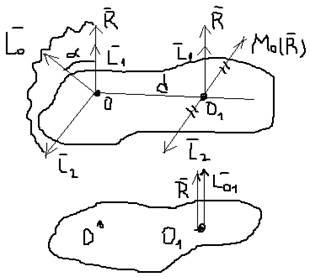
L0 = L1 + L2
|L1| = L0 * cosα
L2 = L0 * sinα
d = L2 / R
M01(R) = O1O * R
L0 * R = L0 * R * cosα = LxRx + LyRy + LzRz
L0 = Lxi + Lyj + Lzk
R = Rxi + Ryj + Rzk
cosα = (RxLx + RyLy + RzLz)/(L0*R)
(Другой вариант ответа)
Дата добавления: 2018-11-26; просмотров: 1836;
Поиск по сайту
Узнать еще
- DC-AC преобразователи. Двухактный инвертор.
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- I2C (Inter-Integrated Circuit) или двухпроводный интерфейс
- II Раціональне розміщення продуктивних сил.
- II. Затраты (времени, физических сил, финансовых средств и т.д.)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
