Скорость скольжения в передаче. Передаточное число
При работе червячной передачи витки червяка скользят по зубьям червячного колеса. Скорость скольженияvs (рис. 18.9) направлена по касательной к винтовой линии делительного цилиндра червяка. Ее определяют из параллелограмма скоростей (на рис. 18.9 v, и v2 — окружные скорости червяка и колеса, м/с):

Как видно из формулы (18.16), всегда vs>v,. Большое скольжение в червячной передаче вызывает значительные потери в зацеплении, нагрев
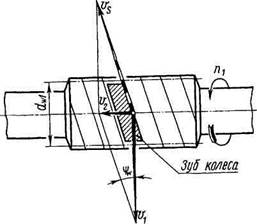
Рис. 18.9. Схема для определения скорости скольжения в червячной передаче
передачи, изнашивание зубьев червячного колеса, увеличивает склонность к заеданию (см. § 12.2).
Повышенный износ и заедание в червячных передачах связаны с неблагоприятным направлением вектора скорости скольжения vs относительно линий контакта зубьев колеса с витками червяка (см. рис. 18.11).
Наиболее благоприятным условием для образования жидкостного трения для поверхностей с линейным начальным касанием является t перпендикулярное направление вектора скорости к линии контакта ' (см. рис. 2.7, а и 28.6, б). В этом случае масло, затягиваемое в клиновидный зазор между трущимися поверхностями, разделяет их и воспринимает частично или полностью действующую нагрузку. Создается непрерывный масляный слой.
Если у поверхности с линейным касанием скольжение происходит вдоль линии контакта, масляный слой в зоне контакта образоваться не может; здесь имеет место сухое и полусухое трение — появляются условия возникновения заедания.
В червячных передачах вид контактных линий зависит от формы рабочей поверхности витка червяка. На рис. 18.11 показана схема последовательного расположения (1...5) контактной линии зацепления зуба колеса с витком архимедова червяка. Как видно, направление контактной линии в положении 2 совпадает с направлением вектора скорости vs скольжения, следовательно, в этой зоне контакта будет сухое трение.
В зоне А (в средней части зуба колеса), в которой направление вектора v,. почти совпадает с направлением контактных линий, затруднены условия смазки. Именно в этой зоне начинается повышенный износ и заедание, которые распространяются затем на всю рабочую поверхность зуба колеса; КПД передачи понижается, ограничивается ее нагрузочная способность.
Наиболее благоприятной зоной контакта является часть зуба колеса со стороны выхода червяка из зацепления. Здесь вектор скорости vs почти перпендикулярен линии 5 контакта, и, следовательно, создаются благоприятные условия для образования масляного слоя.
В червячной передаче с нелинейчатым червяком контактные линии расположены так, что при любом положении в процессе зацепления они остаются почти перпендикулярными вектору скорости vs скольжения. Это обеспечивает повышенную несущую способность такой передачи.
Точность червячных передач.Для червячных передач установлено 12 степеней точности, для каждой из которых предусмотрены нормы кинематической точности, нормы плавности, нормы контакта зубьев и витков. В силовых передачах наибольшее применение имеют 7-я (при VS<10 м/с), 8-я (VS.<5 м/с) и 9-я (vs<2 м/с) степени точности.
Передаточное числои червячной передачи определяют по условию, что за каждый оборот червяка колесо поворачивается на угол, охватывающий число зубьев колеса, равное числу витков червяка:
u = n1/n2 = z2/zl, (18.17)
где и,, «2 — частоты вращения червяка и колеса; zt и z2 — число витков
червяка и число зубьев колеса.
Число витков z1 червяка рекомендуют назначать в зависимости от передаточного числа и:

Во избежание подреза основания ножки зуба колеса в процессе нарезания зубьев принимают z2>2b. Оптимальным является z2 = 32...63.
Для червячных передач стандартных редукторов передаточные числа выбирают из ряда: 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50; 63; 80; 100.
Силы в зацеплении
В приработанной червячной передаче, как и в зубчатых передачах, силу со стороны червяка воспринимает не один, а несколько зубьев колеса. Для упрощения расчета силу взаимодействия червяка и колеса Fn (рис. 18.10, а) принимают сосредоточенной и приложенной в полюсе зацепления П по нормали к рабочей поверхности витка. По правилу параллелепипеда Fn раскладывают по трем взаимно перпендикулярным направлениям на составляющие Ft1, Frl, Fa1.
Окружная сила Fn на червячном колесе численно равна осевой силе FaX на червяке:
Fl2 = Fat = 2-103 T2/d2,(18.18)
где Т2 — вращающий момент на червячном колесе, Н • м; d2 — в мм.
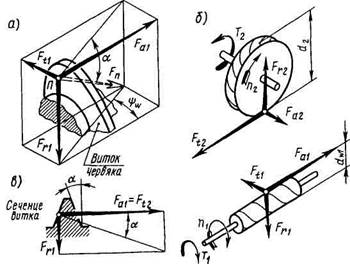
Рис. 18.10. Схема сил, действующих в червячном зацеплении
Окружная сила Fn на червяке численно равна осевой силе Fa2 на червячном колесе:
' (18.19)
Ft1 = Fa2 = 2*103T t /dwt = 2 • 103T2 / (uη dwl ),
где Τ1 — вращающий момент на червяке, Н-м; η — КПД; dwi — B мм. Радиальная сила Fr1 на червяке численно равна радиальной силе Fr2 на колесе (рис. 18.10, в):

Направления осевых сил червяка и червячного колеса зависят от направления вращения червяка и направления линии витка. Направление силы Fl2 всегда совпадает с направлением вращения колеса, а сила Fn направлена в сторону, противоположную вращению червяка (рис. 18.10,6).
Дата добавления: 2020-05-20; просмотров: 845;
Поиск по сайту
Узнать еще
- B — число подмножеств, то частное а : b - это число элементов в каждом подмножестве.
- II. 4. Скорость оседания эритроцитов (СОЭ)
- III. Охлаждение с заданной скоростью.
- L-ОРБИТАЛЬНОЕ КВАНТОВОЕ ЧИСЛО
- V — скорость судна, м/с.
- Абсолютное число; 2 — показатель на 100 000 родившихся живыми.
- Анализ приводов и систем числового управления станков
- Б) Объемная скорость кровотока.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
