Выбор положений автогрейдера для расчетов на прочность.
При определении нагрузок на элементы конструкции автогрейдера рассматривают два случая: работа в обычных условиях эксплуатации и встреча труднопреодолимого препятствия с учетом действия случайных нагрузок.
Расчетное положение Ι. Автогрейдер с колесной схемой 1 х 2 х 3 работает на участке с поперечным уклоном λ. На него действуют максимальные нагрузки, возникающие в процессе резания грунта передним концом отвала, когда передний мост вывешен и упирается в край кювета, а задние колеса буксуют на месте.
Рассматривая систему сил (рис. 14.27) принимают ряд допущений: все реактивные силы, действующие на задние колеса, приложены в точке О2 – проекции оси качания балансирной тележки на опорную поверхность; реакции грунта на колеса равны между собой и условно перенесены на осевые лини (возникающие небольшие моменты не учитываются); коэффициенты сопротивления качению передних и задних колес одинаковы; сопротивление грунта считается сосредоточенной силой, приложенной на конце ножа в точке О; масса автогрейдера сосредоточена в центре тяжести машины, там же приложена сила инерции машины.
На схеме Gгр – сила тяжести автогрейдера; G1 и G2 – части силы тяжести автогрейдера, приходящиеся соответственно на передние и задние колеса; Рн – сила инерции машины; Z1л, Z2п и У2л и У2п –нормальные и касательные реакции грунта на задние колеса; Х2л и Х2п – свободная сила тяги правых и левых колес; У1 – реакция грунта на переднюю ось; Rр – максимальное касательное и RN - максимальное нормальное сопротивление грунта, возникающее при отделении отвалом стружки.
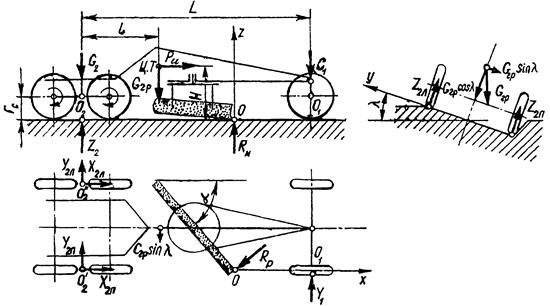
Рис. 14.27 Схема сил, действующих на автогрейдер в первом расчетном положении.
Максимальное касательное сопротивление грунта зависит от тяговых возможностей машины. Тяговое усилие определяется из условия сцепления  или по моменту Мдв, передаваемому двигателем:
или по моменту Мдв, передаваемому двигателем:
 ; (14.124)
; (14.124)
где iобщ – общее передаточное число трансмиссии; ηобщ – КПД этой трансмиссии; rс – силовой радиус колеса.
Свободная сила тяги находится как разность между тяговым усилием Тсц и сопротивлением перекатыванию колес (в приведенной схеме только задних):
 ; (14.125)
; (14.125)
Приблизительные координаты центра тяжести автогрейдера по зависимости:
 ;
;  ; (14.126)
; (14.126)
Сила инерции приближенно определяется по формуле:
 ; (14.127)
; (14.127)
где Кg –коэффициент динамичности, принимаемый для первого расчетного положения равным 1,16…1,2; φмакс =0,85 – максимальный коэффициент использования сцепной силы тяжести.
Составляя и решая совместно уравнения равновесия системы:
 ;
;  ;
;  ;
;  ;
;  ;
;
можно получить значения неизвестных величин Rp, Z2,Y1 и Y2, необходимых для дальнейших расчетов.
Нормальное сопротивление RN принимается равным 0,5 Rp.
Для расчета основной рамы автогрейдера при нагружении ее в расчетном положении Ι принимается, что рама опирается задней частью двумя точками на оси балансиров задних колес.
В плоскости расположения системы подвесок тяговой рамы основная рама нагружена усилиями этих подвесок, а в передней части опирается на шаровой шарнир тяговой рамы (рис. 14.28).
В соответствии с этим раму можно рассматривать как консольную балку с заделкой в вертикальной плоскости, проходящей через подвески тяговой рамы (по оси цилиндров подъема), и нагруженную в передней части реакциями шарового шарнира.
Эти реакции можно определить из уравнения моментов сил относительно осей У и Z:
 ; У=
; У=  ; (14.128)
; (14.128)
Усилие Х уравновешивает силу Rх, т.е. и можно считать равновеликими: Х=Rх.
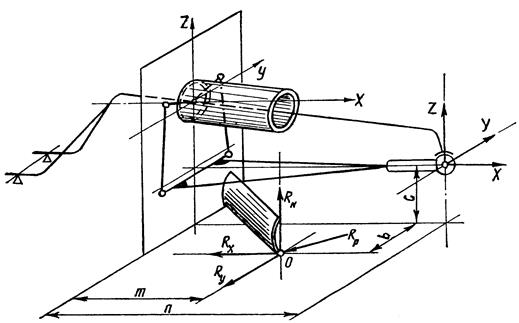
Рис. 14.28 Схема нагружения основной рамы автогрейдера при действии на отвал максимальных сил сопротивления грунта.
Реакции Z и Х изгибают раму в принятом сечении в вертикальной плоскости, а реакция У изгибает раму в горизонтальной плоскости и скручивает ее. Кроме того, сила Х вызывает растяжение.
Следовательно, задавшись сечением основной рамы, по известным формулам сопротивления материалов можно определить возникающие в нем максимальные напряжения.
Расчетное положение ІІ (рис. 14.29). Автогрейдер с колесной схемой 1 х 2 х 3 движется с максимальной рабочей скоростью на горизонтальном участке пути и концом ножа упирается в препятствие.
Предполагается, что масса и жесткость препятствия значительно превосходят массу и жесткость автогрейдера. Тогда дополнительная динамическая нагрузка на автогрейдер определяется только его массой, жесткостью и скоростью столкновения и определяется по формуле:
 ; (14.129)
; (14.129)
где V – скорость автогрейдера в момент столкновения; С - коэффициент жесткости автогрейдера; mа – масса автогрейдера.
Коэффициент жесткости С зависит от жесткости металлоконструкции автогрейдера С1 и пневматических шин С2:
 ; (14.130)
; (14.130)
Значение l1 определяется по компоновочной схеме машины. Жесткость металлоконструкций (кН/м) может быть принята ориентировочно:
С1=(80…100)·GГр
Радиальная жесткость комплекта из n пневматических шин С2 зависит от модели шин, внутреннего давления воздуха в них и составляет С2=n·C'2. Здесь C'2 – радиальная жесткость одной шины. Например, для шины 410-610 при давлении 0,07; 0,13;0,19; 0,25 МПа С2 равно 250; 300; 375; 450 кН/м соответственно.
Силы и реакции находят по уравнению:

 ;
;  ; (14.131)
; (14.131)
 ; (14.132)
; (14.132)
 ; (14.133)
; (14.133)

 ; (14.134)
; (14.134)
Реакции в шаровом шарнире во втором расчетном положении определяются аналогично первому. Силы Рх и Ру известны, а вертикальная реакция грунта принимается равной нулю.
Расчет рамы ведется по тому же опасному сечению от действия реакций Х, У, Z, приложенных в шаровом шарнире тяговой рамы, горизонтальной реакции У1 и силы инерции от массы переднего моста. Схема нагружения рамы для этого случая показана на рис. 14.30.
Сила инерции:  ; (14.135)
; (14.135)
Расчет тяговой рамы выполняется для первого расчетного положения из условий нагружения автогрейдера силами тяжести и инерции (при снижении скорости), а также боковыми реакциями при упоре задних колес в грунтовый уступ, боковыми реакциями передних колес, возникающими за счет сил сцепления и максимальным тяговым усилием, возникающим на пределе полного буксования.
Наиболее неблагоприятными условиями для работы тяговой рамы будет резание грунта на горизонтальном участке передним концом ножа при действии вертикальной реакции грунта вниз.
Действие всех сил приводится к равновеликой системе реактивных сил в шаровом шарнире (Х; У; Z), и раму рассматривают как консольную балку с опасным сечением в месте условной заделки в плоскости, проходящей по оси поворотного круга. Задаваясь формой и размерами опасного сечения, определяют возникающие в нем напряжения.
Во втором расчетном положении методика расчета остается такой же, а система действующих сил соответствует нагружению автогрейдера случайной динамической нагрузкой, как это было рассмотрено выше, применительно к основной раме.
Расчет остальных конструкций и механизмов особой специфики не имеет.
Дата добавления: 2016-06-29; просмотров: 3305;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- Andante cantabile con espressione В. Моцарт. Соната для ф-п. № 8, ч. II
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Audit Trail - Материалы для проведения аудиторской проверки
- I. Выборы: понятие, значение и виды.
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- I.10. Тесты для контроля знаний
- III. Порошки для стирки и мытья

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
