Пример реализации частотно-управляемого ЭП с использованием ПЧ с АИН
Электрическая функциональная схема ЭП ссерийным ПЧ типа АРДН (автоматический регулятор для насосов) приведена на рис. 17.
В ПЧ применена наиболее распространенная для управления короткозамкнутым АД схема ПЧ с АИН и ШИМ напряжения на выходе, неуправляемым выпрямителем на входе силовой части схемы и микропроцессорным управлением. При питании от сети 380 В наиболее рациональным является применение в инверторе полупроводниковых приборов нового поколения — биполярных транзисторов с изолированным затвором IGBT.
Основные элементы, входящие в эту схему (рис. 17):
UZ— неуправляемый выпрямитель; L0, C0 — фильтр; RT— термистор, ограничивающий ток заряда конденсатора С0; R0 — разрядное сопротивление для конденсатора С0; FU1, FU2, FU3 — предохранители; R, С — цепь защиты (снаббер) от перенапряжений на транзисторах IGBT; RS — датчик тока для организации защиты (FA) от сквозных и недопустимых токов перегрузки через IGBT; VT–VD — трехфазный инвертор на IGBT с обратным диодным мостом.
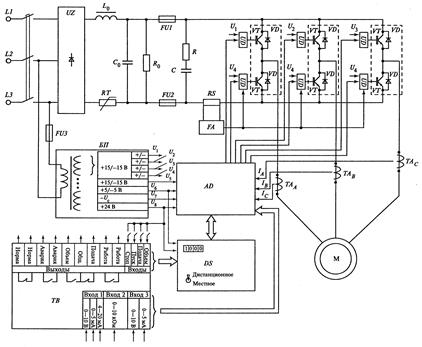
Рис. 17. Функциональная электрическая схема асинхронного ЭП с ПЧ
Основные блоки в системе управления:
– блок питания БП, состоящий из восьми гальванически развязанных источников постоянного напряжения;
– микроконтроллер AD на базе сигнального процессора 1899BE1;
– плата индикации DS с переключателем способа управления: местное или дистанционное;
– блок сопряжения ТВ для работы с внешними сигналами или командами;
– согласующие усилители UD — драйверы IGBT.
Электропривод работает следующим образом.
При подаче напряжения 380 В на силовой вход ПЧ в звене постоянного тока происходит процесс заряда конденсатора фильтра С0, который определяется значениями RT, L0, C0. Одновременно с этим в информационную часть схемы подается питание (напряжения U1 – U8). В процессе выдержки времени на установление напряжений стабилизированных источников питания U1 – U4 аппаратная защита FA блокирует открывание ключей инвертора и происходит запуск программы управления процессором по аппаратно формируемой команде «Рестарт».
Выполняется инициализация. Производится запись начальных условий в ячейки ОЗУ процессора и определяется способ управления — местное или дистанционное. Если с датчиков тока фаз двигателя ТАА, ТАВ, ТАС, аппаратной защиты FA, напряжения сети Uc, а также от всех каналов вторичного источника питания поступает информация о нормальных параметрах, то ЭП готов к работе и на цифровой индикатор выводятся нули, светится светоизлучающий диод «Подача». В противном случае загорается светоизлучающий диод «Авария» и на цифровом индикаторе появляется код срабатывания той или иной защиты.
Для управления двигателем процессор формирует систему трехфазных синусоидальных напряжений, изменяемых по частоте и амплитуде, и передает их в модулятор, в котором синусоидальные сигналы управления фазами — «стойками» инвертора, состоящими из последовательно включенных ключей IGBT, преобразуются в дискретные команды включения и отключения транзисторов классическим методом центрированной синусоидальной ШИМ. Несущая частота ШИМ составляет от 5 до 15 кГц. Одновременное замыкание двух ключей в «стойке» инвертора блокируется, для учета реального времени запирания транзисторов в процесс переключения вводится «мертвое» время, составляющее единицы микросекунд, в течение которого оба ключа разомкнуты.
Микропроцессор 1899ВЕ1 позволяет реализовать только скалярное управление координатами двигателя. Структура системы автоматического управления технологическим объектом, в которую включен данный ПЧ, может быть самой разнообразной — от разомкнутой системы до замкнутой обратными связями по нескольким сигналам. Алгоритм управления также зависит от требований технологического объекта. Структура и алгоритм могут быть перепрограммированы.
Силовая часть ПЧ неизменна и пригодна для других способов управления координатами электродвигателя с применением более совершенных микропроцессорных средств.
Дата добавления: 2016-06-29; просмотров: 2468;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
