СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ.
Математические модели систем управления включают два вида описания состояния: статическое и динамическое.
Виды статических характеристик. Режим работы систем, в котором управляемая и все промежуточные величины не изменяются во времени, называется статическим (установившимся) и описывается уравнениями зависимости выходного состояния объекта управления от постоянных (независимых от времени) значений управляющих воздействий u и любых других дестабилизирующих факторов f. Уравнения этой зависимости вида y = F(u,f) называются уравнениями статики систем. Соответствующие им графики называются статическими характеристиками.
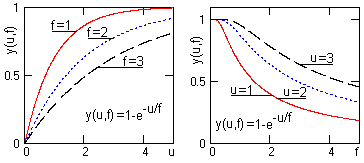
Рис. 2.2.1. Статическая характеристика САУ.
Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u). Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u (рис. 2.2.1).
Примером функционального звена системы регулирования уровня воды в баке может быть обычный рычаг с поплавком. Уравнение статики для него имеет вид y = K u. Функцией звена является усиление (или ослабление) входного сигнала в K раз. Коэффициент K = y/u, равный отношению выходной величины к входной, называется коэффициентом усиления звена. Если входная и выходная величины имеют разную природу, его называют коэффициентом передачи. Звенья с линейными статическими характеристиками называются линейными. Статические характеристики реальных звеньев систем, как правило, нелинейные. Для них характерна зависимость коэффициента передачи от величины входного сигнала: K=Dy/Du ≠ const, которая может быть выражена какой-либо математической зависимостью, задаваться таблично или графически. Если все звенья системы линейные, то система имеет линейную статическую характеристику. Если хотя бы одно звено нелинейное, то система нелинейная.
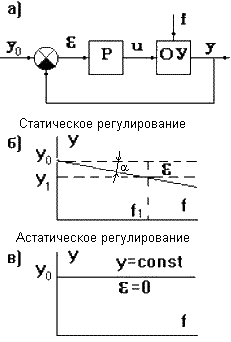
Рис. 2.2.2.
Статическое и астатическое регулирование. Если на управляемый процесс действует возмущение (дестабилизирующий фактор) f, то значение имеет статическая характеристика системы в форме y = F(f) при y0 = const. Возможны два характерных вида этих характеристик (рис. 2.2.2). В соответствии с тем, какая из двух характеристик свойственна данной системе, различают статическое и астатическое регулирование.
Рассмотрим систему регулирования уровня воды в баке. Возмущающим фактором системы является поток Q воды из бака. Пусть при Q = 0 имеем y = y0, сигнал рассогласования по заданному уровню воды e = 0. Звено управления Р системы (регулятор) настраивается так, чтобы вода при этом в бак не поступала. При Q ≠ 0, уровень воды понижается (e ≠ 0), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Следовательно, при Q ≠ 0 заслонка должна быть обязательно открыта, что возможно только при каком-то новом уровне воды y1, при котором e = К (y0-y1) ≠ 0. Причем, чем больше Q, тем при больших значениях e устанавливается новое равновесное состояние. Статическая характеристика системы имеет характерный наклон (рис. 2.2.2б).
Статические регуляторы работают при обязательном отклонении e регулируемой величины y от требуемого значения у0. Это отклонение тем больше, чем больше возмущение f, и называется статической ошибкой регулятора. Чем больше коэффициент передачи К регулятора, тем на большую величину будет открываться заслонка при одних и тех же значениях e, обеспечивая большую величину потока Q, при этом статическая характеристика системы пойдет более полого. Поэтому для уменьшения статической ошибки надо увеличивать коэффициент передачи регулятора. Этот параметр регулирования получил название статизма d и равен тангенсу угла a наклона статической характеристики, построенной в относительных единицах:
d = tg(a) = (Dy/yн) / (Df/fн),
где yн, fн- точка номинального режима системы. При достаточно больших значениях К имеем d » 1/K.
Астатический регулятор применяется, если статическая ошибка регулирования недопустима и регулируемая величина должна поддерживать постоянное требуемое значение независимо от величины возмущающего фактора. Статическая характеристика астатической системы не имеет наклона. Для того чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено. Астатическое звено отличается тем, что каждому значению входной величины может соответствовать множество значений выходной величины. Так, для регулирования уровня воды в астатическом режиме может быть применен импульсный двигатель. Если уровень воды понизится, то появившееся значение e > 0 включит импульсный двигатель и он начнет открывать заслонку до тех пор, пока значение e не станет равным нулю (по определенному порогу). При поднятии уровня воды значение e сменит знак, и запустит двигатель в противоположную сторону, опуская заслонку.
Астатические регуляторы не имеют статической ошибки, но они инерционны, сложны конструктивно и более дороги.
Обеспечение требуемой статической точности регулирования является первой основной задачей при расчете элементов системы управления.
Дата добавления: 2020-04-12; просмотров: 652;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
