А.1 Силы, действующие на мобот при прямолинейном движении.
Мобильный робот в прямолинейном движении.
При движении на мобильный робот (мобот) действуют различные внешние и внутренние силы и моменты.
Внешними по отношению к моботу являются силы, действующие со стороны окружающей среды.
А.1 Силы, действующие на мобот при прямолинейном движении.
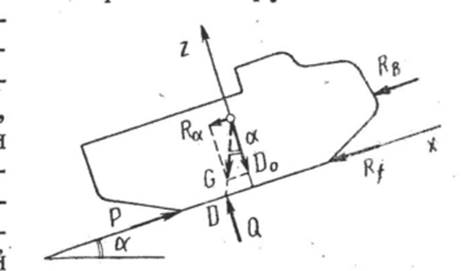
Рис. Р1.
Прямолинейное движение мобота рассматривается без бокового крена.
При ускоренном движении на подъём под углом a (рис. Р1) к горизонту на него действуют следующие силы:
1. Вес мобота. Вес отдельных частей заменяется равнодействующей G, приложенной к центру тяжести. Сила G разлагается на составляющие G·sina и G·cosa, действующие соответственно параллельно поверхности пути и перпендикулярно к этой поверхности. Составляющая G·sina называется силой сопротивления подъёму, а при спуске - скатывающей силой. Составляющая G·cosa, называется сцепным весом и, если отсутствует какая-либо дополнительная сила (например со стороны подводящего электрического кабеля), то в этом случае он равен нормальной реакции грунта R.
2. Сила инерции мобота I. В случае неравномерного движения мобота возникают силы инерции частей шасси, равные произведению их масс на ускорение прямолинейного движения. Эти силы заменяются равнодействующей, приложенной к центру тяжести в сторону, обратную ускорению:
 ,
,
где
 - масса машины;
- масса машины;
 - ускорение прямолинейного движения.
- ускорение прямолинейного движения.
3. Сопротивление среды RС. Эти силы учитываются при движении в воздушной среде на скоростях более 50 км/час. Т.к. в обозримом будущем мобот таких скоростей движения не достигнет, то ею следует пренебречь. Однако для малых систем, работающих на побережье (в полупогруженном состоянии) или под водой, где сопротивление водной среды резко возрастает (рис. Р2) такой учёт необходим.
Рис. Р2. Зависимость силы сопротивления воды от глубины погружения.
4. Для оценки RС при полностью нагруженном состоянии можно воспользоваться зависимостью:
 ,
,
где
C - безразмерный коэффициент, который для необтекаемых форм корпуса приблизительно равен 0,6 - 0,7;
g = 1000 кГ/м3- удельный вес воды;
g = 9,81 м/сек2 - ускорение свободного падения;
V - скорость движения относительно воды, м/сек;
S - площадь поперечного сечения корпуса мобота и рабочего оборудования.
При этом надо вводить поправку для нормальной реакции
RZ’=RZ-D’ ,
на величину поддерживающей силы D’, согласно закону Архимеда
D’=V’×g ,
где V’ - объём воды, вытесненный корпусом.
5. Нормальная реакция грунта RZ. Величина её определяется из уравнения проекции сил на плоскость, перпендикулярную к поверхности пути:
RZ=G×cosa , ( 1 )
Точка приложения нормальной реакции грунта называется центром давления и определяется из уравнения равновесия шасси под действием приложенных к ней всех внешних сил и моментов.
6. Сопротивление опорной поверхности движению мобота. При взаимодействии движителя с опорной поверхностью происходит их взаимная деформация, которая зависит от множества причин [ ]. В результате деформации движителя, грунта, а так же его перемещения возникает сопротивление перемещению мобота в целом. Однако этот сложный процесс качения упрощают и считают, что сопротивление качению пропорционально нормальной реакции грунта или сцепному весу машины:
Rгр=fгр×RZ ,
где
fгр - коэффициент сопротивления качению, определяемый для различных условий экспериментальным путём [ ].
На испытаниях в сопротивление движению включается также внутреннее сопротивление ходовой части шасси, поэтому суммарное сопротивление грунта и агрегатов найдём по выражению:
Rf=f×RZ , ( 2 )
где
f=fгр+fхч.
При расчётах в основном пользуются уравнением ( ), принимая следующие значения коэффициента f для различных условий (таблица Т1).
Таблица Т1.
| Основание | Гусеничный движитель | Колесный движитель |
| Дороги с твёрдым покрытием | 0,03 ... 0,05 | 0,015 ... 0,02 |
| Сухие грунтовые дороги | 0,06 ... 0,07 | 0,025 ... 0,035 |
| Влажные грунтовые дороги | 0,1 ... 0,13 | 0,05 ... 0,15 |
| Песок (сухой) | 0,15 ... 0,20 | 0,1 ... 0,3 |
| Луг | 0,08 ... 0,1 | 0,06 ... 0,1 |
| Снег | 0,1 ... 0,4 | — |
7. Сила тяги мобота Р. Эту силу определяет суммарный крутящий момент МВК на ведущих колёсах
Р=МВК/RВК , ( 3 )
где
RВК - радиус ведущего колеса.
Дата добавления: 2020-04-12; просмотров: 1105;
Поиск по сайту
Узнать еще
- A. Узагальнені координати і узагальнені швидкості та прискорення
- API как средство интеграции приложений.
- C04 ППВ с комментариями и примерами
- Cыры, созревающие при участии слизи.
- F00 Деменция при болезни Альцгеймера
- F50 Расстройства приема пищи
- F51 Расстройства сна неорганической природы
- F63 Расстройства привычек и влечений

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
