Гироскопические устройства
гироскопические приборы, электромеханические устройства, содержащие Гироскопы, и предназначенные для определения параметров, характеризующих движение (или положение) объекта, на котором они установлены, а также для стабилизации этого объекта. Г. у. используют при решении задач навигации, управления подвижными объектами и др.
Наиболее существенными признаками, характеризующими применяемые в технике разнообразные Г. у., являются: тип гироскопа, физический принцип построения чувствительного гироскопического элемента, тип подвеса, назначение Г. у.
Типы гироскопов. Различают два основных типа гироскопов: с тремя и двумя степенями свободы. Гироскопы с тремя степенями свободы делятся на уравновешенные, или астатические, и неуравновешенные, или позиционные.
Гиростабилизатор
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
Перейти к: навигация, поиск

Гиростабилизированная платформа, используемая в МБР.
Гиростабилизатор — гироскопическое устройство, предназначенное для стабилизации отдельных объектов или приборов, а также для определения угловых отклонений объектов. По принципу действия гиростабилизаторы делятся на непосредственные, силовые и индикаторные.[1]
Состав[править | править вики-текст]
Гиростабилизированная платформа обычно состоит из 1, 2 или 3 гироскопов, электронной системы обработки сигналов. Также может содержать акселерометры и другие датчики.
Гиростабилизированные платформы, как измерительный прибор, обычно используются в составе системы управления ракетами, космическими кораблями и орбитальными станциями, самолётами, морскими судами, подводными лодками и т. п.
Также гиростабилизированые платформы применяются в системах видеонаблюдения на базе БПЛА и аэростатов. Дополнительная стабилизация гироскопами применяется в панорамных головках и других устройствах для киносъёмки с движения.
Астатическим называется гироскоп, у которого центр тяжести совпадает с точкой пересечения осей карданова подвеса (т. е. с точкой подвеса). Сила тяжести не влияет на движение оси такого гироскопа и её уходы при внешних возмущениях могут вызываться лишь моментами сил в осях подвеса (моменты сил трения и др.). При отсутствии моментов внешних сил гироскоп называется свободным. Хотя астатические гироскопы не обладают избирательностью по отношению к заданному направлению, т. е. «направляющей силой», стремящейся привести ось гироскопа в определенное положение, они используются в ряде Г. у., например, в гироскопах направления (См. Гироскоп направления), гировертикалях и др., причём прецизионные гироскопы могут применяться без корректирующих устройств.
Позиционным называется гироскоп, обладающий избирательностью по отношению к некоторому направлению; при отклонении его оси от этого направления возникает «направляющая сила», стремящаяся вернуть ось гироскопа в заданное положение. Для придания Г. у. позиционных свойств применяют два способа. Первый состоит в смещении центра тяжести гироскопа относительно точки подвеса. Он используется в Гирокомпасах, у которых «направляющая сила» возникает при отклонении оси гироскопа от плоскости меридиана, и в гиромаятниках, у которых «направляющая сила» возникает при отклонении оси гироскопа от вертикали места. Др. способ состоит в применении астатического гироскопа и соответствующей системы коррекции, например маятниковой (см. Гировертикаль).
Гироскопы с двумя степенями свободы используют в Г. у. чаще всего в качестве дифференцирующих и интегрирующих гироскопов, которые осуществляют дифференцирование (или интегрирование) входного сигнала, т. е. измеряют производную (или интеграл) от той величины, на воздействие которой реагирует Г. у. Например, в Гиротахометре дифференцирующий гироскоп, реагируя на поворот объекта, измеряет его угловую скорость, а поплавковый интегрирующий гироскоп (см. Гироскопический интегратор), реагируя на угловую скорость объекта, измеряет угол его поворота.
Физические принципы построения чувствительных гироскопических элементов. Различают гироскопы с механическим ротором, с жидкостным ротором, вибрационные, лазерные, ядерные. Наиболее распространены гироскопы с механическим ротором: у них носителем кинетического момента является быстровращающееся массивное твёрдое тело — ротор. Носителем кинетического момента может быть и жидкая среда. Вибрационные гироскопы (См. Вибрационный гироскоп) в качестве чувствительного элемента содержат вибрирующие массы (например, ротор с упругим подвесом или упругие пластины) и служат для определения угловой скорости объекта. Лазерный гироскоп представляет собой устройство, в котором используется оптический Квантовый генератор направленного излучения и содержится плоский замкнутый контур (образованный тремя и более зеркалами), где циркулируют два встречных световых потока (луча); он также служит для определения угловой скорости объекта (см. Квантовый гироскоп). Ядерный гироскоп основан на том свойстве, что ядро атома содержит протоны, обладающие спиновыми и орбитальными моментами количества движения, а также связанными с ними магнитными моментами. При этом наличие механического вращательного момента у ядра сообщает ему свойства гироскопа, а наличие магнитного момента даёт возможность ориентировать ось этого гироскопа в пространстве и определять её положение. Ядерные гироскопы могут использоваться в качестве стабилизаторов направления, датчиков угловых скоростей.
Типы подвесов гироскопов. В гироскопах с механическим ротором различают механический, поплавковый, газовый, магнитный, электростатический типы подвесов. В большинстве Г. у. используются гироскопы с механическим подвесом; выполненным в виде карданова подвеса (см. Гироскоп).
В различных двух- и трёхстепенных гироскопах для разгрузки механических опор применяются жидкостные, или поплавковые, подвесы (например, в поплавковом интегрирующем гироскопе), вследствие чего подобные гироскопы мало подвержены вибрационным, ударным и др. возмущающим воздействиям и обладают высокой точностью.
Существенное повышение точности Г. у. достигается при применении гироскопов с газовым подвесом. Ротор такого гироскопа обычно имеет сферическую форму и опирается па чрезвычайно тонкий газовый слой, образующийся между шаром-ротором и специальной опорой. Такой шар является практически свободным гироскопом. Газовые опоры могут также применяться в осях подвеса ротора и кардановых колец.
В некоторых Г. у. используется гироскоп с магнитным подвесом, ротор которого, выполненный в виде ферритовой сферы, поддерживается магнитным полем во взвешенном состоянии. Необходимые характеристики поля автоматически регулируются специальной следящей системой. Другой разновидностью магнитного подвеса является т. н. криогенный подвес ротора, в котором используется взаимодействие магнитных полей, создаваемых токами в сверхпроводниках (См. Сверхпроводники). Поддерживающие силы магнитного поля возникают при изменении положения ротора по отношению к элементам подвеса. Материал ротора, катушек электромагнитов и специальных экранов приводится в сверхпроводящее состояние путём глубокого охлаждения.
В гироскопе с электростатическим подвесом ротор представляет собой полую сферу, наружная поверхность которой имеет высокую проводимость. Ротор помещается между электродами, к которым подводится высокое напряжение, регулируемое специальной следящей системой. Под действием электростатических сил ротор центрируется в пространстве между электродами.
Основные Г. у. По назначению Г. у. подразделяют на следующие группы: 1) Г. у. для определения угловых отклонений объекта. Сюда относятся различные астатические и позиционные гироскопы, а именно: гироскопы направления, определяющие азимутальные отклонения объекта (углы рыскания корабля или летательного аппарата), и гировертикали или гиромаятники, определяющие отклонения объекта относительно плоскости горизонта (углы килевой и бортовой качки корабля, углы тангажа и крена летательного аппарата); 2) Г. у. для определения угловых скоростей и угловых ускорений объекта, в которых используются дифференцирующие гироскопы. К ним относятся гиротахометры и вибрационные гироскопы, определяющие угловые скорости вращения объекта и гиротахоакселерометры, определяющие угловые скорости и угловые ускорения вращения объекта; 3) Г. у. для определения интегралов от входных величин, в которых используются интегрирующие гироскопы: гироскопические интеграторы угловых скоростей, определяющие углы отклонения объекта; интегро-дифференцирующие гироскопы, определяющие углы и угловые скорости вращения объекта, а также гироскопические интеграторы линейных ускорений, которые служат для нахождения линейной скорости объекта; 4) Г. у. для стабилизации объекта или отдельных приборов и устройств, а также для определения угловых отклонений объекта, называют Гиростабилизаторами; 5) Г. у. для решения навигационных задач. Сюда относятся: гирокомпасы, определяющие курс объекта и азимут (пеленг) ориентируемого направления; гиромагнитные компасы (См. Гиромагнитный компас), определяющие магнитный курс объекта, гирошироты, предназначенные для определения широты места; гирошироткомпасы, с помощью которых определяются курс и широта местоположения объекта; гирогоризонткомпасы, служащие для определения курса объекта и углов отклонения его относительно плоскости горизонта, инерциальные навигационные системы (См. Инерциальная навигационная система), которые предназначены для нахождения ряда параметров, необходимых для навигации объектов; Гироорбитанты, которые служат для определения углов рыскания, искусственного спутника Земли; гирорулевые, обеспечивающие автоматическое управление курсом корабля.
Г. у. применяют в морском флоте, авиации, ракетной и космической технике, народном хозяйстве для решения разнообразных задач навигации и управления подвижными объектами, а также при проведении некоторых специальных работ (маркшейдерских, геодезических, топографических и др. — см.
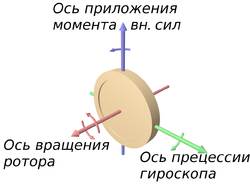
Гироскопом называется массивное симметричное тело, вращающееся с большой угловой скоростью. При обеспечении трех степеней свободы вращения гироскоп сохраняет свое положение неизменным в инерциальном пространстве, то есть абсолютно неподвижном пространстве. Вторым важным свойством гироскопа является прецессия, сущность которой заключается в следующем. Если к гироскопу приложить силу, стремящуюся его повернуть вокруг оси, перпендикулярной оси вращения ротора, то гироскоп станет поворачиваться вокруг третьей оси, перпендикулярной к первым двум. Направление этого прецессионного движения определяется по правилу: вектор кинетического момента гироскопа (главная ось гироскопа) стремится совместиться с вектором момента внешней силы по кратчайшему расстоянию.
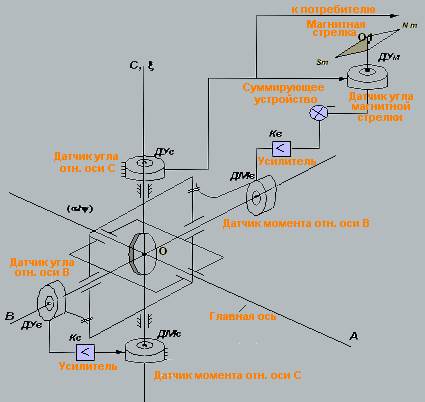
Рис.11. Магнитный компас на основе гироскопа с тремя степенями свободы
Использование второго свойства гироскопа - прецессировать под воздействием внешней силы - позволяет первоначально ориентировать и в дальнейшем стабилизировать положение оси ротора относительно Земли. Это дает возможность определять с помощью гироскопических приборов углы ориентации ЛА в пространстве (курс, крен, тангаж) и другие величины.
Угловая скорость прецессии определяется соотношением:
wп = М / JW = M / H,
где М - момент внешней силы, равный произведению силы на плечо; W - угловая скорость вращения ротора гироскопа; J - момент инерции ротора гироскопа; Н - кинетический момент гироскопа.
Гироскопы современных курсовых приборов имеют кинетические моменты от 3000 до 24000 гс см с при угловых скоростях вращения ротора 20000 - 24000 об/мин.
При гироскопическом способе измерения курса ЛА используется гироскоп с тремя степенями свободы и горизонтальным расположением главной оси (оси ротора). В курсовых приборах такой гироскоп называется курсовым. Свойство гироскопа сохранять положение главной оси в пространстве неизменным дает устойчивое опорное направление для измерения курса. Свойство прецессии используется для сохранения горизонтального положения его главной оси.
Положение главной оси курсового гироскопа, которая моделирует опорное направление, изменяется относительно осей навигационных систем координат. Причинами изменения азимута главной оси курсового гироскопа являются: суточное вращение Земли, перемещение ЛА относительно земной поверхности, собственный уход главной оси гироскопа.
В современных курсовых приборах, работающих в режиме гирополукомпаса, необходимость коррекции курса в основном определяется наличием собственного ухода главной оси гироскопа, которая составляет 0.5 - 2 0/ч. Если исходить из интервала коррекции гироскопического курсового прибора 45 мин - 1ч, то при путевой скорости полета 1200 - 700 км/ч можно сделать вывод о возможности измерения ортодромического курса в гирополукомпасном режиме при удалениях от главной ортодромии 300 - 500 км, при этом ошибка измерения ортодромического курса не превысит 0.50, так как при каждой коррекции курсового прибора она будет компенсироваться.
Практически гирополукомпас обеспечивает измерение условного курса относительно опорного направления осчета курса, называемого опорным меридианом. В качестве опорных меридианов для измерения условного курса принимаются: истинный (магнитный) меридиан аэродрома (ИПМ, ППМ), истинные меридианы с долготой 00 или 900 при полетах в высоких широтах, главная ортодромия (параллель) или меридиан ортодромической системы координат.
Гироско́п (от др.-греч. γῦρος — круг + σκοπέω — смотрю) — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Ж. Фуко в его докладе в 1852 году во Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».

Прецессия

Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование)
Классификация[править | править вики-текст]
Основные типы гироскопов по количеству степеней свободы:
двухстепенные,
трехстепенные.
Основные два типа гироскопов по принципу действия:
механические гироскопы,
оптические гироскопы.
Также проводятся исследования по созданию ядерных гироскопов, использующих ЯМР для отслеживания изменения спина атомных ядер.
Механические гироскопы[править | править вики-текст]
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трехстепенного роторного гироскопа[править | править вики-текст]
См. также: Гироскопический тренажёр
Прецессия механического гироскопа.
При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Поведение гироскопа в инерциальной системе отсчёта описывается, согласно следствию второго закона Ньютона, уравнением

где векторы M и L являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса.
Изменение вектора момента импульса L под действием момента силы возможно не только по величине, но и по направлению. В частности, момент силы M, приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный L , приводит к движению, перпендикулярному как M, так и L, то есть к явлению прецессии. Угловая скорость прецессии гироскопа  определяется его моментом импульса и моментом приложенной силы[10]:
определяется его моментом импульса и моментом приложенной силы[10]: 
то есть обратно пропорциональна скорости вращения гироскопа. Одновременно с возникновением прецессии, согласно следствию третьего закона Ньютона, гироскоп начнёт действовать на окружающие его тела моментом реакции, равным по величине и противоположным по направлению моменту M, приложенному к гироскопу. Этот момент реакции называется гироскопическим моментом.
То же движение гироскопа можно трактовать иначе, если воспользоваться неинерциальной системой отсчёта, связанной с кожухом ротора, и ввести в ней фиктивную силу инерции — так называемую кориолисову силу. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать.
Вибрационные гироскопы[править | править вики-текст]
Вибрационные гироскопы — устройства, сохраняющие поворачивающие или сохраняющие направление своих колебаний при повороте основания пропорционально угловой скорости (ДУС — датчики угловой скорости) или углу поворота основания (интегрирующие гироскопы). Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторными гироскопами. В англо-язычной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — хотя принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Например, микромеханические вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сигвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами.
Подобные типы микрогироскопов используются в мобильных устройствах, в частности, в мультикоптерах, фотоаппаратах и видеокамерах (для управления стабилизацией изображения), в смартфонах и т.д[11].
Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS-гироскопе с частотой .
При повороте гироскопа возникает Кориолисово ускорение равное , где — скорость и — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как : , а положение грузика в плоскости — . Внеплоскостное движение , вызываемое поворотом гироскопа равно:

где:
m — масса колеблющегося грузика.
kop— коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
 — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
— величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
Разновидности[править | править вики-текст]

Гироскоп на МАКС-2009
Пьезоэлектрические гироскопы.
Твёрдотельные волновые гироскопы[12][13]. Работа одной из разновидностей ТВГ разработанные с 80-х гг. компаниями GE Marconi, GE Ferranti (ВБ), Watson Industires Inc. (США), Inertial Engineering Inc. (США) Innalabs, и другими основаны на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и циклически-симметричным. При этом, осесимметричная форма резонатора позволяет достичь характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость, что критично для многих систем стабилизации. Резонаторы подобных КВГ вибрируют по второй форме колебаний (как и в HRG). Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают парную форму колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления (компенсационная обратная связь — КОС) гасит парную форму колебания к нулю. Амплитуда силы (то есть сигнал пропорциональные току или электрическому напряжению в цепи КОС), необходимая для этого, пропорциональна угловой скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной аналогично КОС маятниковых акселерометров и классических роторных ДУС. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закреплённые на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих «тактических» применений (хотя и снижает чувствительность датчика пропорционально расширению его диапазона измерений). Отметим, что упомянутые гироскопы используют современные сплавы инварного типа с паянными пьезоэлектрическими элементами ввода-вывода или пьезокерамические резонаторы с вжиганием электродов. В любом случае, их добротность теоретически ограничена величинами порядка 100тыс. (на практике, обычно, не выше 20тыс.), что на несколько порядков ниже много-миллионной добротности резонаторов КВГ из кварцевого стекла или монокристаллов, используемых для «стратегических» применений.
Камертонные гироскопы.
Вибрационные роторные гироскопы (в том числе динамически настраиваемые гироскопы)[14].
МЭМС-гироскопы[14].
Применение в технике[править | править вики-текст]
Схема простейшего механического гироскопа в карданном подвесе
Свойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА', BB' и CC', пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром (маятником), так как из-за суточного вращения Земли и ухода гироскопа происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[18].
Системы стабилизации[править | править вики-текст]
Системы стабилизации бывают трех основных типов.
Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки
| <== предыдущая лекция | | | следующая лекция ==> |
| Упражнение для бровей | | | СЕРИИ МАШИН ПОСТОЯННОГО ТОКА |
Дата добавления: 2016-06-22; просмотров: 7200;
Поиск по сайту
Узнать еще
- II. Особенности политического устройства Ирана
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- XLII. ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА
- А. Электронные устройства на ОУ
- Автоматические контрольные устройства
- Активный контроль заготовок до обработки. Блокирующие устройства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
