Полюс поворота (П.П.) как критерий поворотливости судов.
Положение П.П. определяет соотношение многих параметров судов. Так, тангенциальная скорость каждой точки по длине судна определяется расстоянием этой точки от П.П. и угловой скорости судна.
Распределение местных скоростей по длине судна при вращении вокруг П.П., расположенном на некотором расстоянии от ЦТ, показано на рис. 20. В одном случае ( рис.20, а ) ППрасположен за корпусом судна на продолжении его ДП, а в другом (рис. 20, б )- в пределах корпуса судна.
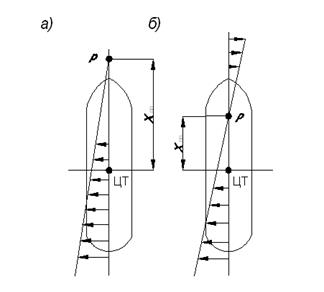
Рис. 20 Распределение местных тангенциальных скоростей по длине судна при вращении вокруг полюса поворота.
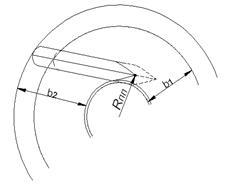
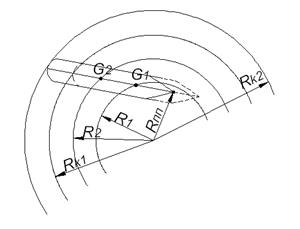
Рис. 21. Геометрические параметры криволинейного движения судов с разными значениями абцисс полюса поворота ( радиусы циркуляции полюсов поворота одинаковы.)
Важно отметить, что положением полюса поворота определяются траектории движения оконечности судна, а, как известно , для судоводителя важно знать не только параметры, характеризующие маневр судна, но и траектории движения носа и кормы.
Рассмотрим влияние положения полюса поворота на радиусы циркуляции носовой и кормовой оконечностей судна, т.е. влияние на размеры акватории, требуемой для выполнения маневра.
На рис. 21 показаны геометрические параметры криволинейного движения судов одинаковых размерений с одинаковыми радиусами кривизны траектории полюса поворота, но с разными величинами абцисс полюсов поворота ( у одного из судов полюс поворота расположен на носовом перпендикуляре, у другого на расстоянии около 0,3 длины судна в нос от ЦТ ).
Рис.22 Ширина требуемых полос движения для судов с разными значениями абсцисс полюса поворота (радиусы циркуляции полюсов поворота одинаковы )
На рис.22 показана ширина требуемой полосы движения тех же судов. На рис. 21 и 22 видно, что судно с меньшим значением абсциссы полюса поворота имеет при том же значении Rпп меньшие радиусы циркуляции R1 и Rk1 , ему требуется полоса движения меньшей ширины b1.
Однако радиус циркуляции полюса поворота Rp не является параметром, по которому обычно судят о поворотливости судна. На рис.23 показаны геометрические параметры циркуляции для тех же судов при одинаковом радиусе циркуляции ЦТ R1,2.
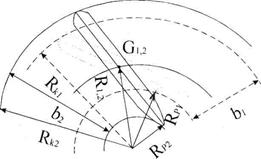
Рис. 23. Геометрические параметры криволинейного движения судов с разными значениями абсциссы полюса поворота ( радиусы циркуляции кормовых оконечностей одинаковы)
Из рис.23 видно, что при одинаковых радиусах циркуляции ЦТ судно с меньшим значением Xpp имеет меньший радиус циркуляции кормовой оконечности Rк1 и больший радиус Rp1. Ширина требуемой полосы движения для этого судна b1, заметно меньше ширины полосы b2.
Из приведенных данных можно сделать следующие выводы:
- лишь один радиус циркуляции какой либо точки ДП судна (обычно рассматривают радиус циркуляции ЦТ или кормовой оконечности) не может давать полного представления о размерах акватории, требуемой для выполнения маневра, а потому нормирование только радиуса циркуляции представляется недостаточным.
- изменение значения абсциссы полюса поворота существенно влияет на значения геометрических параметров циркуляции судна, при этом судно с меньшим значением абсциссы полюса поворота при одинаковых радиусах циркуляции каких либо точек ДП, по сравнению с судном с большим значением х р, всегда требует для маневра акваторию меньших размеров.
Из приведенных выше заключений следует, что нормирование значения абсциссы полюса поворота наряду с нормированием значения какого либо геометрического параметра циркуляции (например, радиуса циркуляции кормовой оконечности судна) может быть эффективным средством регламентирования характеристик поворотливости судов. Ограничение максимального значения абсциссы полюса поворота на циркуляции фактически позволит нормировать значение ширины полосы движения судна в зависимости от его главных измерений. Кроме того, оно позволит сблизить характеры поведения различных судов на циркуляции (это позволит лоцманам легче прогнозировать траекторию движения конкретного судна).
Надо отметить, что особое значение нормирование абсциссы полюса поворота имеет для безопасности плавания судна в стесненных условиях на акваториях портов, в подходных каналах, устьях рек, на внутренних водных путях.
Исследования показывают, что при выполнении судном маневра «оборот» абсцисса полюса поворота достигает наибольшего значения уже в начальный период эволюционного периода и остается неизменной и в установившемся периоде циркуляции.
Интересно, также, что абсцисса полюса поворота достигает наибольшего значения не при максимальных углах перекладки руля, а при средних и малых. Таким образом, возможность прохождения поворота с меньшим углом перекладки руля позволяет обеспечивать достаточный запас управляемости.
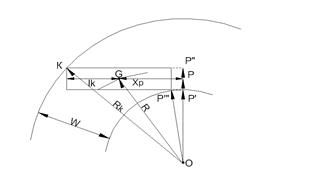
Определим зависимость между шириной полосы движения судна на повороте и значениями абсциссы полюса поворота и одного из геометрических параметров циркуляции. Для упрощения задачи форму корпуса в горизонтальной плоскости примем прямоугольной, и рассмотрим схемы поворота судна, представленные на рис. 24. и 25.
Рис. 24. Схема поворота судна при расположении полюса поворота в пределах длины судна
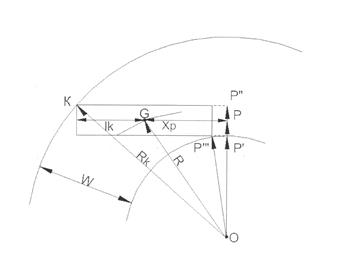
Рис.25Схема поворота судна при расположении полюса поворота за пределами длины судна
Рассмотрим первый случай. Как видно из схемы на рис. 24, ширина полосы движения судна W равна разнице радиусов кривизны траекторий точек К и Р', или:
W=RK-O Р' (44)
Величины этих радиусов найдем следующим образом. Радиус кривизны траекторий ОР' лежит на одной прямой с радиусом циркуляции полюса поворота ОР и, следовательно, так же образует прямой угол с диаметральной плоскостью судна. Величина радиуса ОР' равна:
ОР'=ОР-РР'=Rр-B/2, (45)
где RР - радиус циркуляции полюса поворота.
Величина радиуса Rк равна
 (46)
(46)
где хР - абсцисса полюса поворота;
1к - относительное отстояние кормовой оконечности ДП судна от его ЦТ (всегда имеет отрицательное значение).
В результате получаем:
 ; (47)
; (47)
Величину RР можно выразить через радиус циркуляции ЦТ (К) и абсциссу полюса поворота (хР):
 ; (48)
; (48)
Подставив выражение (48) в выражение (47) можно получить зависимость ширины полосы движения судна на повороте от абсциссы полюса поворота судна и радиуса циркуляции его ЦТ:
 (49)
(49)
Рассмотрим случай, когда при повороте судна полюс поворота располагается за пределами его длины. Как видно из схемы на рис 26 радиус ОР' в этом случае не определяет ширину полосы движения судна, поскольку он меньше радиуса кривизны траектории самой близкой к центру поворота точки носовой оконечности судна ОР'". Ширина полосы движения судна в этом случае равна:
 (50)
(50)
Радиус Rк определяется по формуле, а радиус ОР'" определится по следующему выражению:
 (51)
(51)
Окончательно получаем:
 (52)
(52)
Величину радиуса RP можно выразить через радиус циркуляции  по выражению (48)
по выражению (48)
Полученные формулы недействительны при значении  и при хР= R(β= 90°), т. е. лишь в специфических случаях маневрирования.
и при хР= R(β= 90°), т. е. лишь в специфических случаях маневрирования.
Из вышесказанного следует, что акватория, требующаяся для поворота судна, определяется радиусом Rк и шириной полосы движения судна w. Эти параметры, в свою очередь, определяются значением абсциссы полюса поворота и значением радиуса циркуляции ЦТ судна, как основным параметром, используемым при нормировании управляемости. Кроме этого величины Rк и w зависят не только от длины и ширины судна, но так же от дифферента (от него зависит величина 1к).
Таким образом, величиной абсциссы полюса поворота наряду со значением радиуса циркуляции ЦТ или кормовой оконечности судна задаются размеры акватории, требующейся для поворота судна.
На основании выполненных расчетов по различным типам судов можно сделать следующие выводы:
- у судов с соотношением L/B=8 полюс поворота при движении «со стопа» находится на расстоянии L/8 от форштевня ;
- при увеличении соотношения L/B у судов значение абциссы полюса поворота увеличивается, что приводит к ухудшению поворотливости (это вызвано увеличением момента инерции относительно вертикальной оси, проходящей через полюс поворота);
- дифферент на корму приводит к увеличению абциссы полюса поворота, что ухудшает поворотливость судна;
- дифферент на нос уменьшает значение абциссы полюса поворота, что улучшает поворотливость судна;
- вращение судна вокруг ПП, сохраняющего неподвижное положение относительно воды, возможно лишь в частном случае, когда этот ПП совпадает с ЦТ судна (например, при использовании носового и кормового ПУ одновременно). Если же ПП отстоит от ЦТ на некотором расстоянии хт, то при вращении возникает центробежная сила приложенная к ЦТ, в результате чего судно постепенно приобретает также и продольное перемещение. Это движение при необходимости можно компенсировать подрабатыванием главного двигателя в нужном направлении.
Дата добавления: 2020-03-17; просмотров: 972;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
