Методология создания структурно-пространственной модели исследуемых изображений.
Выделение элементов пространственной структуры представляет собой процесс получения классифицированного изображения, на котором определены четыре класса структурных элементов. Построение структурно-пространственной модели необходимо осуществлять применяя многоуровневый классификатор, так как выделение классов структурных элементов в силу различия их геометрических и контекстных свойств требуют, соответственно, различных подходов при их классификации.
Для решения задачи выделения на поле исходных изображений структурного элемента “точечные объекты” может использоваться “разностный алгоритм”, предложенный Розенфельдом и др. Последовательное применение данного алгоритма ко всем совместно обрабатываемым изображениям и последующее сложение полученных бинарных изображений позволяет выделить все точки, имеющие локальный контраст хотя бы в одной зоне спектрального диапазона. Экспериментальное исследование работы этого алгоритма показало его высокую эффективность выделения точечных объектов в случае их расположения на фоне однородных областей.
К недостаткам данного алгоритма следует отнести необходимость эмпирического подбора пороговых значений при получении бинарных изображений в интерактивном режиме.
Отмеченный недостаток устранен в разработанном автором алгоритме выделения точечных объектов посредством локальной пороговой обработки с адаптивным выбором пороговых значений на основе оценки локального контраста обрабатываемой точки изображения (x,y). Алгоритм работает следующим образом. Обрабатываемое изображение сканируется скользящим окном размером 3х3 элемента изображения, в котором определяются выборочные оценки среднего значения интенсивности m и среднего квадратичного отклонения s (СКО) по следующим формулам
1 1 1
m = —[ å å f(x+i,y+j)- f(x,y)]
8 i=-1 j=-1
1 1 1
s2= —{ å å [f(x+i,y+j)-m]2-[f(x,y)}- m]2} (2)
8 i=-1 j=-1
Полученные оценки используются для определения локальных пороговых значений T(x,y) при выделении точечных объектов по следующему правилу. Элемент изображения определяется, как точечный объект, если выполняется следующее условие
abs ( f(x,y) - m ) < T(x,y) (3)
где T(x,y) = ks k - некоторая константа.
Для теоретического обоснования выбора значения константы k примем предположение о Гауссовом распределении значений интенсивности фона, на котором расположен точечный объект. Вероятность ложного обнаружения точечного объекта F будет определяться следующим выражением
2 k
F(k)= — ò exp(-t2/2)dt (4)
Ö2p -¥
откуда определяется значение k.
Использование данного алгоритма позволяет автоматически выделять точечные объекты с заданной вероятностью ложного обнаружения F.
Для выделения малоразмерных объектов также может быть использован разностный алгоритм, предложенный Розенфельдом и др. Недостатком этого алгоритма является то, что он наряду с малоразмерными объектами выделяют контрастные линейные объекты определенной толщины. Для устранения этого недостатка был разработан модифицированный алгоритм выделения малоразмерных объектов, работающий следующим образом.
Исходное изображение сканируется окном размером 3lx3l элементов, где l равняется линейной толщине выделяемых малоразмерных объектов. В этом окне выбираются 9 окон размером lxl элементов, в которых вычисляются средние значения интенсивности m и средние квадратичные отклонения s. Малоразмерный объект выделяется в том случае, если среднее значение в центральном окне m0 существенно отличается от средних значений в каждом из прилегающих восьми окон m1,...,m8.
Полученные выборочные средние значения и СКО используем для построения обнаружителя малоразмерных объектов с заданными вероятностными характеристиками. Определим вероятность правильного обнаружения малоразмерного объекта Pпо , как вероятность принятия решения об обнаружении малоразмерного объекта в случае наличия малоразмерного объекта, и вероятность ложного обнаружения малоразмерного объекта Pло , как вероятность принятия решения об обнаружении малоразмерного объекта в случае отсутствия малоразмерного объекта.
Рассмотрим случай, когда значения интенсивности малоразмерного объекта превышают значения интенсивности фона. В предположении о Гауссовом характере распределения значений интенсивности малоразмерных объектов вероятность правильного обнаружения будет определяться следующим выражением
1 ¥
Pпо(k)= — ò exp(-t2/2)dt (5)
Ö2p kпо
где kпо - некоторая константа правильного обнаружения, определяемая из выражения (5).
Приняв предположение о Гауссовом характере распределения значений интенсивности фона, получим следующую формулу, определяющую вероятность ложного обнаружения
1 ¥
Pло(k)= — ò exp(-t2/2)dt (6)
Ö2p kло
где kло - некоторая константа ложного обнаружения, определяемая из выражения (6).
Соответствующие вышеопределенным константам значения интенсивностей fпо и fло определяются из следующих выражений
(mo - fпо) (fло - mф)
kпо = ———— kло = ——— (7)
sо sф
где mo - выборочное среднее интенсивности малоразмерного объекта
sо - СКО интенсивности малоразмерного объекта;
mф - выборочное среднее интенсивности фона;
sф - СКО интенсивности фона.
fпо = mo - kпоsо fло = mф + kлоsф
Решение об обнаружении малоразмерных объектов принимается при выполнении условия fпо ³ fло
и, соответственно, решающее правило обнаружения малоразмерных объектов большей интенсивности, чем фон имеет следующий вид
mo - mф
————— ³ 1 (8)
kпоsо + kлоsф
Повторив вышеприведенные выкладки для случая, когда интенсивность малоразмерных объектов меньше интенсивности фона получим следующее решающее правило
mф - mо
————— ³ 1 (9)
kпоsо + kлоsф
Соответственно решающее правило обнаружения малоразмерных объектов в общем случае будет иметь следующий вид
abs(mф - mо)
————— ³ 1 (10)
kпоsо + kлоsф
Решение об обнаружении малоразмерного объекта принимается при выполнении условия (10) для всех сочетаний центрального окна (mо sо) с восемью соседними окнами (mi si) i= 1,...,8. Последовательное применение этого алгоритма ко всем обрабатываемым зональным изображениям и последующее сложение изображений с выделенными малоразмерными объектами позволяет получить изображение малоразмерных объектов, которые удовлетворяют вышеопределенному критерию, хотя бы в одном спектральном диапазоне.
На основе экспериментальных исследований работы разностного и адаптивного порогового алгоритма сделаны следующие выводы. И разностный алгоритм, и предложенный адаптивный пороговый алгоритм обеспечивают уверенное выделение малоразмерных объектов со значением контраста выше 1. Уменьшение контраста при использовании обоих алгоритмов приводит к снижению вероятности правильного обнаружения, причем оба алгоритма перестают выделять малоразмерные объекты с уровнем контраста ниже 0,4. Использование разностного алгоритма приводит к ложному выделению малоразмерных объектов на контрастных границах однородных областей, а также в местах расположения линейных объектов. Адаптивный пороговый алгоритм, обеспечивая правильное обнаружение малоразмерных объектов, позволяет исключить ложное выделение линейных объектов и границ однородных областей, как малоразмерных объектов.
Выделение элементов пространственной структуры изображений, определенных как “протяженные объекты” и “граничные и линейные объекты”, осуществляется путем классификации изображений, на которых выделены “точечные”, и “малоразмерные” объекты, соответственно, обработке подвергаются точки изображения, не отнесенные к этим элементам. Выделение элемента структуры “граничные и линейные объекты” осуществляется путем пороговой обработки изображений с контрастированными границами. Для получения изображений с контрастированными границами обычно используются два вида алгоритмов:
- алгоритмы пространственного дифференцирования;
- алгоритмы высокочастотной Фурье-фильтрации.
Такой подход эффективен при обработке изображений, на которых отсутствует четко выраженная текстура. При наличии четко выраженной текстуры велика вероятность отнесения точек протяженных объектов к граничным объектам. Поэтому более эффективной является следующая последовательность операций при определении на изображениях протяженных и граничных объектов. На первом этапе по эталонным участкам протяженных объектов находятся объекты с четко выраженной текстурой. Затем производится выделение этих объектов по текстурным признакам. Из общего поля изображения производится вычитание выделенных участков, отнесенных к протяженным объектам. Оставшиеся участки разделяются на протяженные и граничные объекты методом пороговой обработки. Для выбора пороговых значений можно использовать эталонные участки границ, осуществляя подбор пороговых значений в интерактивном режиме. Общая блок-схема построения структурно-пространственной модели, обрабатываемых изображений, показана на рисунке 2.
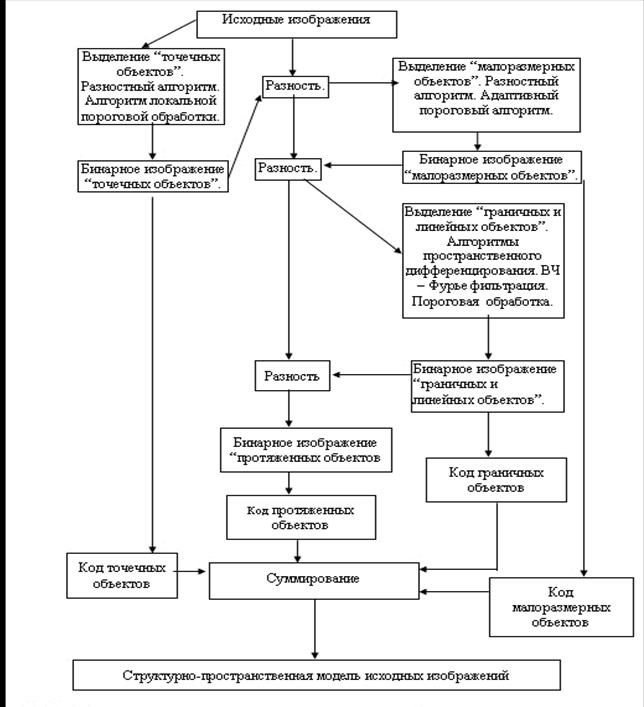
Рис.2. Блок-схема построения структурно-пространственной модели изображений.
В результате получаем классифицированное четырехуровневое изображение, описывающее структурно-пространственные характеристики исследуемых изображений.
Дата добавления: 2016-06-18; просмотров: 2665;
Поиск по сайту
Узнать еще
- А. Аналитические модели.
- А. Модели экономического прогноза на базе производственных функций.
- Автоматизация технологического проектирования. Основные задачи и модели автоматизации технологического проектирования
- Автоматизация ТП. Моделирование техпроцесса.
- АВТОРСКИЕ МОДЕЛИ ПСИХОЛОГИЧЕСКОЙ СЛУЖБЫ, ИЛИ КАК ОБРЕСТИ СВОЕ ЛИЦО
- Адекватность модели и объекта
- Алгоритмы и модели компоновки
- Ассортимент растений, рекомендуемый для создания санитарно-защитных зон и озеленения города

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
