Реверсивные тиристорные электроприводы: принципы работы, согласование режимов и современные решения
Реверсивные тиристорные электроприводы с совместным управлением вентильными группами обеспечивают плавное регулирование скорости и момента электродвигателей. Их работа основана на согласовании углов управления выпрямительной и инверторной групп, что минимизирует уравнительные токи и обеспечивает стабильность характеристик.
Ключевые методы согласования
1. Линейное (симметричное) согласование
Углы управления удовлетворяют условию:
- α₁ + α₂ = 180° или α₁ = β₂ (формула 3-38).
Преимущества:
- Безлюфтовое сопряжение характеристик двигательного и тормозного режимов.
- Минимальное изменение скорости при переходе между режимами (Δω ≈ 2ΔUв / Cе).
Недостатки:
- Требуются массивные уравнительные дроссели (до 70% массы трансформатора).
- Ограничение минимального угла управления (α ≥ β_min) для предотвращения сбоев коммутации.
2. Нелинейное (несимметричное) согласование
Условие: α₁ + α₂ > 180°.
Особенности:
- Уменьшение уравнительных токов за счет снижения индуктивности дросселей.
- Наличие зоны нечувствительности (люфта) в управлении, устраняемой в замкнутых системах с обратной связью.
Анализ уравнительных токов. Источники возникновения:
- Разность мгновенных ЭДС выпрямительной и инверторной групп.
- Пульсации напряжения в контуре (частота — 6f_сети для 3-фазных схем).
Расчет индуктивности дросселей:
Формула: Lур = (E₂max × k_эф) / (ω_с × Iур_эф) − 2Lф, где k_эф — коэффициент, зависящий от схемы выпрямления (рис. 50).
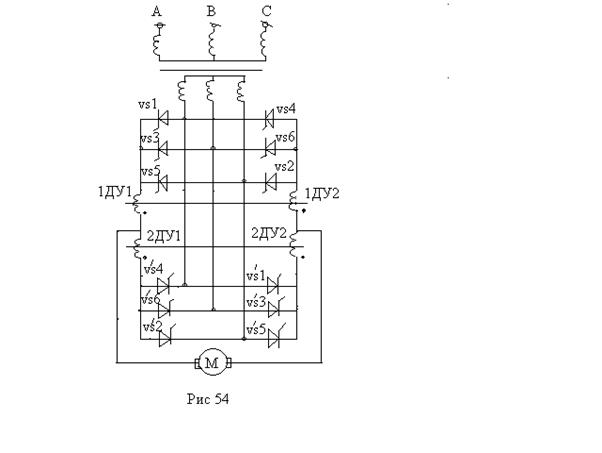
Современные решения:
- Использование двухобмоточных дросселей (рис. 54) для снижения массы и взаимной компенсации магнитных потоков.
Динамика переходных процессов. Броски тока:
- Возникают при резком изменении нагрузки или смене режима.
- Ограничиваются ПИ-регуляторами в двухканальных системах (рис. 52-53).
Цифровое управление:
- Микроконтроллеры (например, TI C2000) с алгоритмами прогнозирования тока.
- Внедрение SiC-тиристоров для снижения потерь и повышения быстродействия.
Обновленные стандарты и технологии
1. ГОСТ Р 58095-2018: Требования к изоляции и испытаниям дросселей.
2. Цифровые СИФУ:
- Автоматическая коррекция углов управления с учетом температуры и старения компонентов.
- Интеграция с SCADA-системами для мониторинга в реальном времени.
3. Применение в промышленности:
- Металлургия: реверсивные прокатные станы с точностью позиционирования до ±0.1 мм.
- Электромобили: рекуперативное торможение с КПД до 95%.
Заключение. Реверсивные тиристорные электроприводы с совместным управлением остаются востребованными в задачах точного регулирования. Современные тенденции включают:
- Замену аналоговых систем на цифровые платформы с адаптивными алгоритмами.
- Использование широкозонных полупроводников (SiC, GaN) для повышения эффективности.
- Сокращение массы оборудования за счет оптимизированных магнитных систем.
Устранение традиционных недостатков (люфт, громоздкие дроссели) открывает новые возможности для внедрения в робототехнику и системы «умного» производства.
Дата добавления: 2016-06-18; просмотров: 2488;
Поиск по сайту
Узнать еще
- I.1.4 РАВНОМЕРНОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ
- I.1.5 РАВНОПЕРЕМЕННОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ
- Векторы. Линейное векторное пространство
- Виды механического движения (прямолинейное и криволинейное).
- КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ
- Криволинейное движение. Кинематика твердого тела.
- Криволинейное движение. Нормальное и тангенциальное ускорения. Кривизна траектории.
- Криволинейное движение. Тангенциальное и нормальное ускорения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
