Реверсивные шаговые двигатели
Для осуществления реверса зубцы статора и ротора ШД должны быть симметричными (без клювообразных выступов). Рассмотрим работу двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. Будем считать, что намагничивающие силы фаз (НС) распределены по синусоидальному закону.
При включении фазы под постоянное напряжение (условно положительной полярности) вектор НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс=Mmaxsinq, где q – угол между осью ротора и вектором НС.
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 3.2, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90о(второй такт на рис. 3.2). При включении фазы А на напряжение обратной полярности (третий такт на рис. 3.2) НС и ротор повернутся еще на  и т.д.
и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн=arcsin(Mн/Mmax).
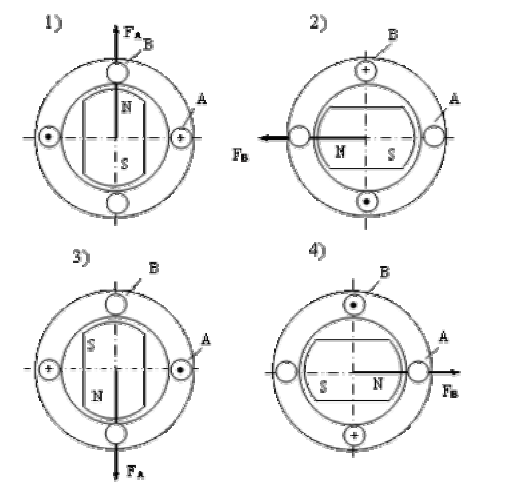
Рис. 3.2. Устойчивые положения ротора при включении фаз
Рассмотренный способ переключения обмоток можно представить в виде таблице 1
Таблица 1
| Полярность импульсов | Такты коммутации | |||
| </TD< tr> | ||||
| +UA | ||||
| +UВ | ||||
| –UA | ||||
| –UВ |
Такой же шаг двигателя, но в  раз большое значение намагничивающей силы (и соответственно синхронизирующего момента) можно получить при одновременном переключении двух обмоток по алгоритму, показанному в табл.2
раз большое значение намагничивающей силы (и соответственно синхронизирующего момента) можно получить при одновременном переключении двух обмоток по алгоритму, показанному в табл.2
Таблица 2
| Полярность импульсов | Такты коммутации | |||
| +UA | X | X | ||
| +UВ | X | X | ||
| –UA | X | X | ||
| –UВ | X | X |
Шаг двигателя можно уменьшить в 2 раза, если обмотки переключать в соответствии с табл.3
Таблица 3
| Полярность импульсов | Такты коммутации | |||||||
| +UA | X | X | X | |||||
| +UВ | X | X | X | |||||
| –UA | X | X | X | |||||
| –UВ | X | X | X |
В зависимости от типа электронного коммутатора управление ШД может быть:
· однополярным или разнополярным;
· симметричным или несимметричным;
· потенциальным или импульсным.
При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от –U до +U.
Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным– если разное. Способы переключения обмоток, соответствующие тал. 1 и 2 будут симметричными, а по табл.3 – несимметричным.
При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. При отсутствии управляющего сигнала обмотка или группа обмоток находятся под напряжением, а положение ротора фиксируется полем обмоток. При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного оборота ротора n следующее (m – число фаз):
1) при однополярной коммутации и симметричном управлении n=m;
2) при разнополярной коммутации с симметричным управлением n=2m;
3) при несимметричной разнополярной коммутации n = 4m.
Очевидно, что несимметричная коммутация возможно только при m³ 2.
В многополюсных ШД число устойчивых положений возрастает пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному управляющему импульсу (угол между двумя соседними устойчивыми состояниями)
Для рассмотренных двигателей р=1, m=2(в первом двигателе одному такту
соответствует действие возбужденных полюсов, а другому, при отключении обмотки, – действие полюсов с постоянными магнитами). Следовательно, при разнополярной симметричной коммутации шаг двигателей  . При несимметричной разнополярной коммутации
. При несимметричной разнополярной коммутации  .
.
Если в двухфазном двигателе выполнить выводы средних точек, он фактически превращается в четырехфазный ШД (рис. 3.3). В отличие от двигателей с обычной двухфазной обмоткой, питаемой разнополярными импульсами, данный двигатель можно питать однополярными импульсами, что значительно упрощает коммутатор, хотя и приводит к несколько худшему использованию материалов.
Магнитоэлектрические ШД удается выполнить с шагом до  . Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
. Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
Гораздо более мелкий шаг (до долей градуса) можно получить в редукторных (индукторных) ШД. Индукторные ШД выполняются с числом фаз m=2¸4. Они имеют зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) (например, рис. 3.4). Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
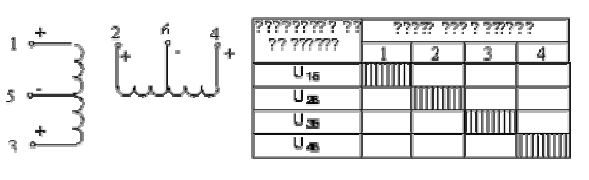
Рис.3.3. Схема обмоток и порядок коммутации 4–х фазного ШД
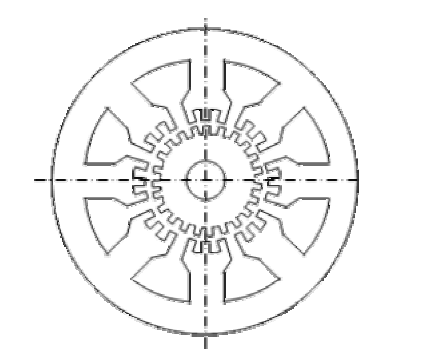
Рис. 3.4. Геометрия магнитной системы индукторного ШД
Основной особенностью индукторных двигателей является то, что магнитное поле в зазоре содержит постоянную и переменную составляющие. Постоянная составляющая поля возбуждается либо постоянной составляющей тока обмоток управления – у двигателей с самовозбуждением, либо специальной обмоткой возбуждения – у двигателей с независимым возбуждением, либо постоянными магнитами – у магнитоэлектрических двигателей. Переменная составляющая магнитного поля создается импульсами тока обмоток управления, поступающими от электронного коммутатора.
Дата добавления: 2022-02-05; просмотров: 491;
Поиск по сайту
Узнать еще
- Асинхронные двигатели
- Асинхронные двигатели. Конструкция, принцип действия
- Асинхронные исполнительные двигатели
- АСИНХРОННЫЕ ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
- Асинхронные электродвигатели взрывозащищенного исполнения серии ВАОВ
- Асинхронные электродвигатели с фазным ротором в крановых электроприводах
- Бесконтактные двигатели постоянного тока
- Газомоторные пневматические двигатели

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
