Учет влияния погрешностей прямолинейных направляющих.
При рассмотрении поступательного движения направляемого звена механизма возможны два случая:
1) линии действия рабочих точек направляемого звена пересекаются в точке Р.
2) линии действия рабочих точек звена параллельны между собой.
1 случай: линии действия пересекаются.
В случае, когда линии действия пересекаются в точке Р, особенности рассмотрения проявления погрешностей для поступательных направляющих связаны с тем, что центр мгновенного поворота точка О удален в бесконечность, и базовая линия Р-Р проходит через точку Р, перпендикулярно к траектории идеального движения.
С учетом этой особенности могут быть использованы для расчета ранее рассмотренные формулы:
Здесь под  следует понимать погрешность траектории точки Р или любой другой точки, лежащей на нормали Р-Р.
следует понимать погрешность траектории точки Р или любой другой точки, лежащей на нормали Р-Р.
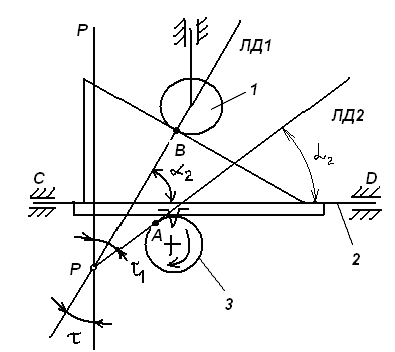
На рисунке показан механизм с поступательно движущимся звеном 2. Это звено снабжено зубчатой рейкой, зацепляющимся в точке А с зубчатым колесом 3, приводящим в движение весь механизм. На звене 2 расположена клиновая линейка, воздействующая в точке В на вертикальный роликовый толкатель 1. Линии действия ЛД1 и ЛД2, проходящие через рабочие точки А и В, пересекаются в точке Р. Базовая линия Р-Р проведена через точку Р, перпендикулярно к траектории движения звена 2.
Погрешности направляющих С и D должны быть приведены к дополнительному перемещению  вдоль линии Р-Р. Перемещения должны учитывать при расчете избыточного приращения по выходной линии ЛД2 по известной формуле:
вдоль линии Р-Р. Перемещения должны учитывать при расчете избыточного приращения по выходной линии ЛД2 по известной формуле:
Отметим, что при контроле непрямолинейности хода направляемого звена 2 механизма погрешность  следует измерять по базовой линии Р-Р.
следует измерять по базовой линии Р-Р.
При расчете погрешности направляющей удобно пользоваться углами, отсчитываемыми между линиями действия и линией движения.
2 случай. Линии действия параллельны.
Если линии действия рабочих точек параллельны, то тогда формула

для определения коэффициентов влияния не годна, т.к.  ,следовательно,
,следовательно,  Кроме того не может быть применено и понятие о базовой линии, т.к. не только центр поворота удален в бесконечность, как это было в случае прямолинейного поступательного перемещения, но и отсутствует точка пересечения двух линий действия.
Кроме того не может быть применено и понятие о базовой линии, т.к. не только центр поворота удален в бесконечность, как это было в случае прямолинейного поступательного перемещения, но и отсутствует точка пересечения двух линий действия.
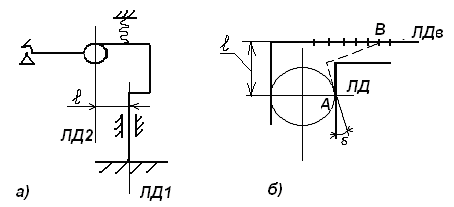
На рис.а показана направляющая для измерительного стержня и рабочей контактной плоскости рычажно-зубчатого индикатора. Рабочая точка А соответствует точке контакта измерительного наконечника с измеряемым изделием, а точка В является точкой соприкосновения плоскости со сферой, закрепленной на качающемся звене рычажного механизма отсчетного прибора.
На рис.б показана направляющая в виде штанги и рамки штангенциркуля. Через рабочую точку А проходит линия действия ЛД, а в точке В расположен отсчетный индекс для снятия отсчета по линейной шкале, с которой совпадает и линия движения ЛДв. Возникающая погрешность на выходе вследствие погрешности направляющей пары связано с возникновением перекоса направляемого звена на угол δ и расстоянием lмежду линиями действия.
В случае, когда l=0, т.е. линии действия совпадают, имеет место выполнение принципа Аббе, и влияние перекоса направляемого звена становится погрешностью второго порядка малости.
Повышение точности работы поступательных направляющих достигается в некоторых случаях путем разделения транспортных и измерительных функций, выполняемых этими направляющими. Обычно в этих случаях в качестве измерительных направляющих используют образцовые поверхности, разгруженные от усилий, связанных с сопротивлениями перемещения кареток.
Дата добавления: 2021-12-14; просмотров: 527;
Поиск по сайту
Узнать еще
- I. Создание системы управленческого учета.
- II. Психологические приемы влияния на партнера.
- II. СВЕДЕНИЯ О ВОИНСКОМ УЧЕТЕ
- PEST-анализ состоит в выявлении и оценке влияния факторов макросреды на результаты текущей и будущей деятельности предприятия.
- А теперь рассмотрим критерии исключения грубых погрешностей или промахов.
- Автоматизация документооборота и учета грузов на складах
- Автоматизированная форма учета
- Автоматизированные аналитико-статистические информационные системы, системы учета и управления

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
