Колебания управляемых колес
В процессе движения управляемые колеса автомобиля могут совершать колебания вокруг шкворней (осей поворота) в горизонтальной плоскости. Такие колебания вызывают износ шин и рулевого привода, повышают сопротивление движению и увеличивают расход топлива. Они могут привести к потере управляемости автомобиля и снижению безопасности движения. Причинами, вызывающими эти колебания, являются гироскопическая связь управляемых колес, их неуравновешенность (дисбаланс) и двои-
|
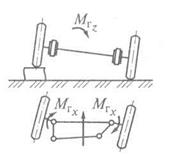
Рис. 8.7. Схема возникновения самовозбуждающихся колебаний (автоколебаний) управляемых колес при зависимой подвеске
ная связь колес с несущей системой (рама, кузов) через рулевой привод и подвеску.
При наездах одного из колес на дорожные неровности при зависимой их подвеске (рис. 8.7) происходит перекос переднего моста. Управляемые колеса наклоняются, и изменяется положение их оси вращения. Это приводит к возникновению гироскопического момента МГх,который действует в горизонтальной плоскости и поворачивает управляемые колеса вокруг шкворней.
Поворот колес вокруг шкворней вызывает возникновение другого гироскопического момента МГz,который действует в вертикальной плоскости и стремится увеличить перекос моста и наклон колес.
Таким образом, перекос моста обусловливает колебания управляемых колес вокруг шкворней, а они, в свою очередь, увеличивают перекос моста, т.е. обе колебательные системы связаны между собой и влияют друг на друга.
Возникающие в этом случае колебания управляемых колес вокруг шкворней непрерывно повторяются (самовозбуждаются), являются устойчивыми и наиболее опасными.
При вращении неуравновешенного колеса (рис. 8.8) возникает центробежная сила Рц. Ее вертикальная составляющая Pzстремится переместить колесо в вертикальном направлении и наклонить его, что вызывает появление гироскопического момента Мх.Горизонтальная составляющая Рхцентробежной силы стремится повернуть колесо вокруг шкворня. Колебания управляемых колес становятся особенно значительными, когда не уравновешены оба колеса и неуравновешенные части располагаются с разных сто-
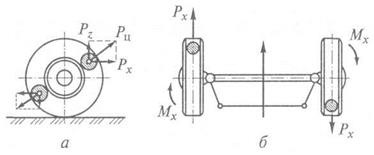
Рис. 8.8. Дисбаланс управляемых колес:
а — силы, действующие на неуравновешенные колеса; б — схема возникновения поворачивающего момента
|
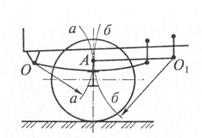
Рис. 8.9. Связь управляемых колес с несущей системой автомобиля:
А — шарнир; О, О{ — центры колебаний; аа, бб — траектории перемещения шарнира
рон осей вращения, так как в этом случае поворачивающие моменты Мх складываются. Колебания также возрастают при увеличении скорости движения автомобиля в связи с тем, что значения составляющих Pz и Рх центробежной силы Рцво многом зависят от скорости.
Управляемые колеса автомобиля имеют двойную связь с его несущей системой, которая осуществляется через подвеску и рулевой привод.
При вертикальных перемещениях колеса (рис. 8.9) шарнир А,соединяющий продольную рулевую тягу с рычагом поворотного кулака, должен перемещаться по дуге бб с центром в точке О1, что обусловлено кинематикой рулевого привода.
Кроме того, шарнир А также должен перемещаться по дуге аа с центром в точке О,что связано с особенностями кинематики подвески. Однако дуги аа и бб расходятся, поэтому вертикальные перемещения управляемых колес сопровождаются их поворотом вокруг шкворней.
Колебания управляемых колес вокруг шкворней совершаются с высокой и низкой частотой.
Колебания высокой частоты, превышающей 10 Гц, с амплитудой не более 1,5... 2° происходят в пределах упругости шин и рулевого привода. Эти колебания не передаются водителю и не приводят к нарушению управляемости автомобиля, так как поглощаются в рулевом управлении. Однако высокочастотные колебания вызывают дополнительный износ шин и деталей рулевого привода, повышают сопротивление движению автомобиля и увеличивают расход топлива.
Колебания низкой частоты (менее 1 Гц) с амплитудой 2...30 нарушают управляемость автомобиля и безопасность движения. Для их устранения необходимо снизить скорость автомобиля.
Полностью устранить колебания управляемых колес вокруг шкворней невозможно — их можно только уменьшить. Это обеспечивается применением независимой подвески управляемых колес, что ослабляет гироскопическую связь между ними, применением балансировки колес, благодаря чему устраняется их неуравновешенность, уменьшением влияния двойной связи колес с несущей системой, что достигается принятием различных конструктивных мер.
8.5. Стабилизация управляемых колес
При движении силы, действующие на автомобиль, стремятся отклонить управляемые колеса от положения, соответствующего прямолинейному движению. Чтобы не допустить поворота управляемых колес под действием возмущающих сил (толчки от неровностей дороги, порывы ветра и др.), управляемые колеса должны обладать стабилизацией.
Стабилизацией управляемых колес называется их свойство сохранять положение, отвечающее прямолинейному движению, и автоматически возвращаться в это положение.
Чем выше стабилизация управляемых колес, тем легче управлять автомобилем, выше безопасность движения, меньше износ шин и рулевого управления.
На автомобилях стабилизация управляемых колес обеспечивается наклоном шкворня или оси поворота колес в поперечной и продольной плоскостях и упругими свойствами пневматической шины, которые создают соответственно весовой, скоростной и упругий стабилизирующие моменты.
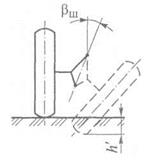
Весовой стабилизирующий момент возникает вследствие поперечного наклона шкворня или оси поворота управляемого колеса (при бесшкворневой подвеске). Поперечный наклон оси поворота (рис. 8.10), характеризуемый углом βш, при повороте колеса вызывает подъем передней части автомобиля на некоторую высоту h'. При этом масса передней части стремится возвратить колесо в положение прямолинейного движения. Создаваемый в данном случае стабилизирующий момент и является весовым.
Хотя весовой стабилизирующий момент меньше, чем стабилизирующий момент шины, он не зависит ни от скорости движения, ни от сцепления колеса с дорогой. У автомобилей угол поперечного наклона шкворня (оси поворота) управляемого колеса βш = 5... 10°. При увеличении угла βш повышается стабилизация управляемых колес, но затрудняется работа водителя.
Весовой стабилизирующий момент приближенно можно рассчитать по следующей формуле:
Мсв= Gкlцsin βш sinθ,
где Gк— нагрузка на колесо; lц — длина поворотной цапфы; θ — угол поворота колеса.
|
Рис. 8.10. Поперечный наклон оси поворота управляемого колеса

|
| Рис. 8.11. Продольный наклон оси поворота управляемого колеса |
Скоростной стабилизирующий момент создается в результате продольного наклона шкворня. Продольный наклон оси поворота (рис. 8.11), определяемый углом γш, создает плечо а действия реакций дороги, возникающих при повороте колеса между шиной и дорогой в месте их касания. Эти реакции помогают возврату колеса в положение, соответствующее прямолинейному движению. Создаваемый в этом случае стабилизирующий момент и является скоростным.
Обычно боковые реакции дороги на колесах возникают вследствие действия на автомобиль центробежной силы, которая пропорциональна квадрату скорости движения на повороте. Поэтому скоростной стабилизирующий момент изменяется пропорционально квадрату скорости движения.
У автомобилей угол продольного наклона оси поворота управляемых колес γш = 0...3,5°. При увеличении угла γш повышается стабилизация управляемых колес, но усложняется работа водителя.
Скоростной стабилизирующий момент
Мсс= Rya = Rуrкsinγш ,
где а — плечо действия реакции дороги Ry; rк— радиус колеса; γш — угол продольного наклона шкворня.
Упругий стабилизирующий момент шины создается при повороте управляемого колеса вследствие смещения результирующей боковых сил, действующих в месте контакта шины с дорогой, относительно центра контактной площадки (рис. 8.12).
Упругий стабилизирующий момент, создаваемый шиной:
Мсу= Рбb,
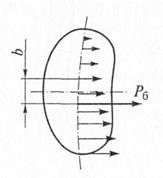
|
где Рб— результирующая боковых сил; b — плечо действия силы Рб.
| Рис. 8.12. Схема возникновения упругого стабилизирующего момента шины |
Стабилизирующий момент шины достигает значительной величины у легковых автомобилей, которые имеют высокоэластичные шины и движутся с большой скоростью. Он может составлять 200... 250 Н·м при углах увода колес 4... 5°. Поэтому при очень эластичных шинах угол продольного наклона шкворня делают равным нулю, чтобы не усложнять управление автомобилем. Однако при небольшой скорости движения стабилизи-
рующий момент шины не обеспечивает надежной стабилизации управляемых колес. Кроме того, упругий стабилизирующий момент шины резко уменьшается на дорогах с небольшим коэффициентом сцепления (скользких, обледенелых).
Стабилизация управляемых колес неразрывно связана с установкой управляемых колес автомобиля.
Дата добавления: 2021-12-14; просмотров: 717;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
