Дайте определение радиальной структуре телемеханической сети.
3. ОРГАНИЗАЦИЯ МНОГОКАНАЛЬНОЙ
ТЕЛЕМЕХАНИЧЕСКОЙ СВЯЗИ
3.1. ВРЕМЕННОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
В телемеханических системах одна линия связи используется для контроля и управления многими объектами. С этой целью линия связи уплотняется путём образования телемеханических каналов.
Телемеханический канал связи – это комплекс технических средств, служащих для передачи информации от источника к получателю. Канал связи состоит из линии связи и аппаратуры связи.
Для создания телемеханических каналов все сигналы, передаваемые по линии связи и несущие информацию своему объекту, разделяются.
Разделение сигналов – обеспечение независимой передачи и приема многих сигналов по одной линии связи или в одной полосе частот, при которой сигналы сохраняют свои свойства и не искажают друг друга.
Существуют следующие типы разделения сигналов:
– временное;
– частотное;
– частотно-временное.
Временное разделение сигналов заключается в том, что каждому из п сигналов, которые должны быть переданы, линия связи предоставляется поочередно. Сначала за промежуток времени t1 передается сигнал 1, за промежуток t2 – сигнал 2 и т.д. (рис. 3.1). При временном разделении или временном уплотнении сигналов каждый сигнал занимает свой временной интервал, не занятый другими сигналами. Время, которое отводится для передачи всех сигналов, называется циклом.
Между информационными временными интервалами ti, в которых передаются сообщения, необходимы защитные временные интервалы (см. рис. 3.1) во избежание взаимного влияния сигнала одного канала на сигнал соседнего канала, т.е. переходных искажений. При правильном выборе полосы пропускания, а также соотношения между длительностью импульсов и паузой взаимное влияние каналов нетрудно предотвратить [8].
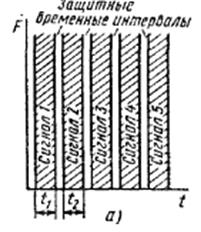
Рис. 3.1. Частотно-временная характеристика
временного разделения сигналов
Для реализации временного разделения используют устройства, которые называются коммутаторами, или распределителями.
Коммутатор (или распределитель) – это устройство с несколькими выходами, выходной сигнал которого имеется только на одном выходе и последовательно перемещается с первого выхода на последний. Аналогично определяется коммутатор с несколькими входами и одним выходом.
В системе с временным разделением сигналов один коммутатор устанавливают на пункте управления, а другой – на контролируемом пункте (рис. 3.2).
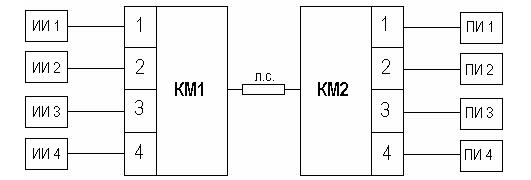
Рис. 3.2. Структурная схема телемеханической системы
с временным разделением сигналов:
ИИ1, …ИИ4 – источники информации; КМ1, КМ2 – коммутаторы;
ПИ1, …ПИ4 – приёмники информации
В современной реализации этой схемы могут быть применены: в качестве КМ1 – мультиплексор, в качестве КМ2 – демультиплексор, у которых соответственно выход и вход подключены к линии связи.
Коммутаторы КМ1 и КМ2 работают синхронно и синфазно, они находятся на одних и тех же позициях и переключаются одновременно.
Когда они находятся на первой позиции, то первый источник информации ИИ1 через первую позицию коммутатора КМ1 и его выход подключен к линии связи. Второй конец линии связи подключён через вход коммутатора КМ2 и его первую позицию к приёмнику информации ПИ1. Таким образом, на первой позиции коммутаторов по линии связи передаётся информация от ИИ1 к ПИ1.
Далее коммутаторы переключаются на вторую позицию и передаётся информация от ИИ2 к ПИ2, на третьей позиции коммутаторов передаётся информация от ИИ3 к ПИ3, на четвёртой – от ИИ4 к ПИ4.
Промежуток времени, за который передаётся информация от всех источников своим получателям, называется циклом. На рис. 3.3 для упрощения представлен цикл, состоящий всего из четырех позиций, образуемых при работе коммутаторов. В первом цикле (верхняя строка рисунка) показана передача четырех телеизмеряемых величин (ТИ1 – ТИ4), во 2-м цикле дается пример передачи команды телеуправления на первой позиции и приема сигнала телесигнализации на четвертой. Ввиду отсутствия информации вторая и третья позиции в этом цикле не используются.
Такое ВР при передаче дискретной информации называют синхронным временным разделением (СВР). При СВР информация может передаваться в каждой позиции каждого цикла.
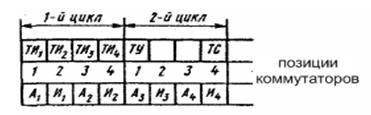
Рис. 3.3. Диаграмма работы системы с временным разделением сигналов
Непрерывная передача информации возможна лишь в том случае, если источник информации готов к передаче, т.е. ему есть что передавать. В телемеханике непрерывно передаются текущие телеизмерения. Командная информация обычно передается реже. Поэтому при СВР используют далеко не все позиции, что приводит к недогруженности канала связи.
Для увеличения пропускной способности системы с временным разделением каждую позицию можно не закреплять за определенным источником информации, а предоставлять её в первую очередь источнику, у которого накопилась информация, т.е. который находится в активном, или возбужденном, состоянии.
Этот способ временного разделения называют асинхронным временным разделением (АВР). При СВР сигналы определенного канала выделяются на приеме просто, так как при передаче каждому каналу в цикле отведена своя позиция. При АВР передача информации с данного источника может происходить на разных позициях цикла, которые неизвестны на приеме. Поэтому при АВР необходима дополнительная посылка адреса получателя передаваемой информации, чтобы она была принята именно тем приемником, которому предназначается.
В нижней строке рис. 3.3 приведен пример асинхронного временного разделения, на первой и третьей позициях цикла передаются адреса (А1, А2, А3, А4), а на второй и четвёртой позициях – информация (соответственно И1, И2, И3, И4).
3.2. ЧАСТОТНОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
Частотное разделение сигналов заключается в том, что для каждого из «п» сигналов, подлежащих передаче, выделяется своя полоса частот: для сигнала №1 – DF1, для сигнала №2 – DF2 и так далее (рис. 3.4). Это значит, что при частотном разделении (частотном уплотнении) каждый сигнал занимает свой частотный интервал, не занятый другими сигналами, т.е. каждому из п сигналов, которые должны передаваться, присваивается своя частота: сигналу №1 – DF1, сигналу №2 – DF2 и сигналу №n – DFn.
На передающей стороне, в качестве которой в системе телеуправления является ПУ, помещаются генераторы частот Г1, ..., Гп, каждый из которых генерирует синусоидальное колебание соответствующей частоты f1, f2, ..., fп. Ключи К1, …, Кn служат командными устройствами, вырабатывающими команды телеуправления. Каждый полосовой фильтр ПФ1, …, ПФп, имеет центральную частоту, соответствующую частоте «своего» генератора.
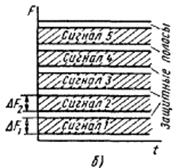
Рис. 3.4. Частотно-временная характеристика
частотного разделения сигналов
Технически такая передача, например, для телеуправления осуществляется следующим образом (рис. 3.5).
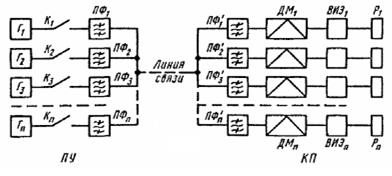
Рис. 3.5. Структурная схема системы телеуправления
с частотным разделением сигналов
Г1, ..., Гn – генераторы гармонических колебаний; К1, …, Кn – ключи;
ПФ1, …, ПФп – полосовые фильтры; ДМ1, …, ДМn – демодуляторы;
ИЭ1, …, ВИЭn – выходные исполнительные элементы; Р1, …, Рn – электромеханические реле
На приемной стороне (КП) каждый из посланных сигналов выделяется сначала полосовым фильтром, настроенным на данную частоту, с него поступает на соответствующий демодулятор ДМ, после чего эта команда поступает на выходной исполнительный элемент ВИЭ, который в свою очередь включает «своё» электромеханическое реле Р.
Для включения реле P1нужно замкнуть ключом К1 цепь генератора Г1, который посылает в линию связи частоту f1. На КП этот сигнал проходит только через фильтр  и после выпрямления включает реле Р1.
и после выпрямления включает реле Р1.
Аналогично ключом К2 включается реле P2 и т.д., причём по линии связи можно одновременно передавать несколько сигналов и каждый сигнал будет принят только своим получателем информации. За время, равное длительности одного сигнала, могут быть переданы сразу все или несколько сигналов.
Ширина полосы частот каждого частотного сигнала (канала) определяется нестабильностью генератора, длительностью импульса (при импульсной передаче) и качеством фильтра. Стабильность генераторов и крутизна характеристики фильтров не могут быть идеальными, поэтому, во-первых, между частотными каналами предусмотрены защитные полосы, во-вторых, введены фильтры ПФ1, …, ПФп,препятствующие попаданию в линию связи сигналов с генераторов в случае значительного дрейфа их частот.
3.3. ЧАСТОТНО-ВРЕМЕННОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
Частотно-временное разделение сигналов заключается в том, что каждая позиция временного разделения уплотняется несколькими частотными каналами. Схема частотно-временного разделения сигналов сочетает схему временного разделения (см. рис. 3.2) и схему частотного разделения (см. рис. 3.4).
Частотно-временное разделение является производным от частотного и временного разделений, поэтому ему присущи достоинства и недостатки частотного и временного разделения.
Временное и частотное разделения сигналов являются основными в телемеханике. Сравнивать их можно по различным параметрам. Сравнение, например, по технической реализации показывает, что временное разделение хорошо реализуется на современных цифровых устройствах, это проще, чем реализация с использованием частотно-зависимых элементов, которыми являются генераторы гармонических колебаний и полосовые фильтры. Недостатком временного разделения является меньшее быстродействие, так как по линии связи предаётся только один сигнал.

Рис. 3.6. Частотно-временная характеристика
частотно-временного разделения сигналов
КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ
Разделение сигналов – обеспечение независимой передачи и приема многих сигналов по одной линии связи или в одной полосе частот, при которой сигналы сохраняют свои свойства и не искажают друг друга.
Временное разделение сигналов – разделение сигналов, при котором каждый сигнал занимает свой временной интервал, не занятый другим сигналом.
Дата добавления: 2021-11-16; просмотров: 917;
Поиск по сайту
Узнать еще
- I. Определение и структура методов обучения.
- I. Определение условий выполнения рукописи.
- I. Определение, виды радиоактивности, радиоактивные семейства
- III. Разряды числительных по структуре
- IV. Разряды союзов по происхождению и структуре
- Mатематическое определение ОС.
- V. По характеру изменений в первичной структуре ДНК.
- А) Деградация почв и определение ее скорости

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
