Реализация векторного управления.
Векторное управление может быть реализовано в частотно регулируемом электроприводе, как на основе АИТ с ШИМ, так и на основе АИН с ШИМ.
Одна из возможных схем управления на основе АИН с ШИМ представлена в виде структурной схемы. 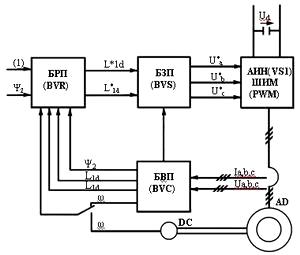 рис.35
рис.35
где БРП – блок регуляторов переменных
БЗП – блок задания переменных
БВП – блок вычисления переменных
ДС – датчик скорости
Рассмотрим системы управления двух видов:
· Сенсорная (ω измеряется)
· Бессенсорная (ω вычитается)
Положение переключателя на схеме соответствует бессенсорной схеме управления.
На вход блока регулирования переменных подают задающий сигнал ω или М, а также потокосцепление ротора ψ2. Кроме того, на БРП подается сигнал ОС с выхода БВП, ориентированные по значениям составляющих токов статора (I1М, I1ψ), а также потокосцепления ротора (ψ2, ω). БЗП осуществляет преобразование задающих переменных (I1М* I1ψ* - преобразованные входные задающие сигналы) в систему трехфазных сигналов управления АИН с ШИМ. Смысл преобразования заключается в координатном преобразовании параметров из неподвижной системы в подвижную ортогональную систему координат. Ориентация поля ротора АД заключается в совмещении продольной оси с вектором потокосцепления ротора. При этом достигается полное совпадение между I1М c I1g и I1d c I1ψ, а также достигается соответствие углов векторов ψ2 и ψ2d.
БВП вычисляет текущие значение амплитудных и фазных параметров, потокосцепления ротора ψ2, а также моментообразующей I1М и потокообразующей I1ψ тока статора, осуществляя преобразование реальных сигналов с выхода АИН с ШИМ. Надежность и стоимость системы управления, а также качество характеристик электропривода зависит от числа измеряемых параметров и от точности их измерения.
Для векторного управления АД необходимо измерять минимум два из четырех доступных для измерения переменных.
1. Токи в фазах статора (Ia, Ib, Ic)
2. Напряжения в фазах статора (Ua, Ub, Uc)
3. Угловая скорость вращения ротора (ω)
4. Положение ротора (угол отклонения ротора относительно вертикальной оси).
Наиболее простым и надежным является ЭП разомкнутый по скорости, т.е. не содержащий датчика скорости – бессенсорный ЭП.
В таких ЭП измеряется только ток и напряжении статора, а ω и s вычисляются в БВП. При этом в БВП задается модель которая учитывает типовые или реальноизмеренные активные и индуктивные сопротивления двигателя. Однако из-за сложности точного представления этих параметров (в частности невозможно учитывать зависимость активного сопротивления от температуры двигателя). Такие ЭП обладают невысокими регулируемыми свойствами (низкая точность при малых скоростях вращения) диапазон регулирования Д=100:1.
Значительно больший диапазон 1000:1 обеспечивают замкнутые по скорости ЭП (сенсорные), содержащие в своем составе электромеханические или цифровые датчики скорости, устанавливаемые на валу двигателя. Такие электроприводы меньшее надежны и имеют боле высокую стоимость.
Векторное управление частотно регулируемым электроприводом с ШИМ требуют высокой скорости вычислений и может быть реализовано на современных мощных цифровых микропроцессорных контроллерах. Требуется большое число датчиков, способных обеспечить высокую точность измерения.
Дата добавления: 2017-11-21; просмотров: 1403;
Поиск по сайту
Узнать еще
- JK-тpиггеp типа MS: особенности работы, схемная реализация.
- Агрегат управления.
- АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.
- Аппаратная реализация компьютера
- Аппаратная реализация компьютера
- Аппаратурная реализация разложения сигнала
- Асинхронный RS-тpиггеp, реализация на базовых логических элементах И-НЕ,ИЛИ-HЕ. RS-тpиггеp для подавления дребезга контактов.
- Базис векторного пространства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
