Регулирование скорости вращения.
Система УСП-Д позволяет осуществлять регулирование скорости вращения, как «вниз» (основной диапазон), так и «вверх» (вспомогательный диапазон).
Регулирование «вниз» реализуется изменением Ud, подводимого к якорю: Ud=var.
Регулирование «вверх» – изменением магнитного потока двигателя: Фдв=var(Rвд).
Чтобы снизить угловую скорость вращения двигателя ω, необходимо уменьшить напряжение на выходе УВ Ud. С этой целью управляющее воздействие вносится в фазовращающее устройство ФСУ , т.е. увеличиваются индуктивность, что приводит к увеличению α.
Уравнение регулировочной характеристики будет иметь вид:
Где Rэ- эквивалентное активное сопротивление управляемого статического преобразователя.
Rэ=Rув+Rтр+RL+(Xэ.тр/π)
Rув – внутреннее активное сопротивление силовой схемы управляемого выпрямителя
Rтр – активное сопротивление входного трансформатора
RL – активное сопротивление сглаживающего фильтра (дросселя)
(Xэ.тр/π)– активная составляющая сопротивления вхоного трансформатора, определяющая коммутационное снижение напряжения ___ (физический смысл – влияние индуктивности трансформатора на процесс, подействует как активное сопротивление)
При этом семейство регулировочных характеристик будет иметь вид:
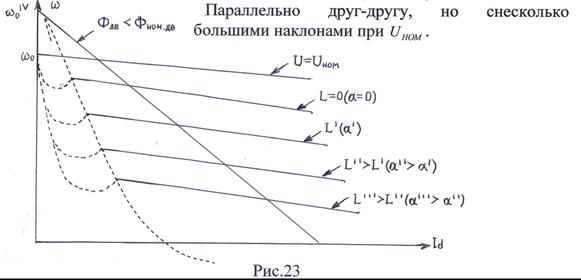
Естественная характеристика системы УСП-Д несколько менее жесткая чем естественная характеристика Д за счет влияния эквивалентного активного сопротивления управляемого статического преобразователя.
Характерной особенностью регулировочных характеристик системы УСП-Д является наличие так называемой “нерегулируемой зоны” (пунктир), расширяющейся в области малых скоростей вращения.
Другое название этой зоны – это “область прерывистых токов”, которая выражается в том, что при работе двигателя в режиме близком к холостому ходу (при малых значениях тока якоря), энергии запасенной в индуктивности нагрузки может оказаться недостаточно для непрерывного протекания тока через нагрузку в результате чего области отрицательной полярности в кривой выходного напряжения уменьшаются, что может привести к резкому увеличению среднего выходного напряжения Ud и как следствие- к неконтролируемому увеличению скорости двигателя.
Таким образом в области нагрузок, близких к холостому ходу, скорость вращения двигателя в системе УСП-Д становится неопределенной. Отсюда название “нерегулируемая зона”.
Показатели качества регулирования.
1. направление – двузонное;
2. плавность чрезвычайно высокая;
3. допустимая нагрузка на валу: в нижнем диапазоне- при постоянном моменте, в верхнем- при постоянной мощности;
4. стабильность: в нижнем диапазоне высокая, однако ниже чем в системе Г-Д за счет того, что эквивалентное сопротивление УСП больше внутреннего сопротивления генератора, в верхнем диапазоне низкая;
5. энергетическая эффективность высокая, как в верхнем так и в нижнем диапазоне.
Диапазон:
Нижний- Д=10:1
Верхний- Д=2:1
Суммарный- Д=20:1
Таким образом если судить по показателям в целом они аналогичных показателям системы Г-Д, за исключением стабильности.
Дата добавления: 2017-11-21; просмотров: 1350;
Поиск по сайту
Узнать еще
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ
- Pиc. 67. Зависимость скорости осаждения от величины катодно-анодного отношения
- VI. Гемецеллюлозы и их превращения.
- VII. Регулирование частоты вращения двигателя
- Абсолютные скорости изменения критериев оценки УБП
- Автоматическое регулирование (РОУ) редукционно-охладительных установок.
- Автоматическое регулирование в области дуговой сварки
- Автоматическое регулирование возбуждения СД.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
