Тормозные режимы УСП-Д
Еще одним недостатком системы УСП-Д по сравнению с системой Г-Д является сложность реализации рекуперативного торможения и реверса. Поэтому единственный способ торможения, который реализуется также просто, как и во всех других системах является динамическое торможение.
Сложность рекуперативного торможения и реверса в системе УСП-Д абусловлена тем, что переход рабочей точки во второй и третьей квадранты декартовой плоскости связан с изменением направления тока на выходе выпрямителя. А при этих условиях силовые ключи управляемого выпрямителя УВ не могут отпираться. Поэтому для реализации рекуперативного торможения и реверса используются специальные виды системы УСП-Д, так называемая «реверсивная система УСП-Д с одним преобразовательным комплектом» и «реверсивная система УСП-Д с двумя преобразовательными комплектами». При этом необходимо отметить, что реверс в системе УСП-Д является следствием не режима противовключения, а рекуперативного режима.
Рассмотрим принципиальные схемы и работу УСП-Д с одним преобразовательным комплектом и с двумя преобразовательными комплектами в режимах рекуперативного торможения и реверса. Схема УСП-Д с одним преобразовательным комплектом представлена на рисунке 29 графического приложения.
Схема состоит из: входного (согласующего) трансформатора и трехфазного мостового преобразователя включающего в себя шесть силовых ключей (справа катодная группа, слева анодная группа). К выходным зажимам преобразователя через так называемые реверсирующие контакты (левое положение-1, правое -2). Подключена якорная цепь двигателя со сглаживающим фильтром (дросселем). Преобразователь попеременно работает в двух чередующихся режимах:
а) выпрямление (α<  )
)
б) инвертирование (α > )
В рабочей точке а механические характеристики (рис.24) Преобразователь работает в режиме выпрямления, при этом угол управления (α< )).
Таким образом для того чтобы перейти в режим рекуперативного торможения необходимо, во первых изменить полярность подключения двигателя переведя реверсирующие контакты из положения 1 в положение 2, а угол управления α изменить таким образом, чтобы α> )т.е перевести преобразователь в режим инвертирования и при этом β=π-α. При дальнейшем увеличение угла управления характеристика будет иметь вид кривой 8-9-10-11-12-13-14 до тех пор пока в точке 15 угловая скорость становится равной 0.
Для того, чтобы реверсировать двигатель Д мы должны перевести преобразователь в режим выпрямления  но при этом реверсирующие контакты остаются в положение 2, т.е. обратно их переключать не нужно.
но при этом реверсирующие контакты остаются в положение 2, т.е. обратно их переключать не нужно.
Главным недостатком однокомплектного реверсивного преобразователя является отсутствие быстродействия и малая надежность в связи с наличием реверсирующих контактов. В этом плане лучшими показателями обладают реверсивные управляемые преобразователи с двумя преобразовательными комплектами. Принципиальная схема такого преобразователя представлена на рисунке 30 графичесого приложения. Схема включает в себя входной (согласующий) трансформатор и два преобразовательных комплекта включенных по встречно параллельной схеме. При этом такой преобразователь обеспечивает протекание тока в якорной цепи двигателя в обоих направлениях без применения реверсирующих контактов. Работа силовых ключей первой и второй преобразовательной групп (обозначены Iи II) характеризуется попеременным использованием в них режимов выпрямления и инвертирования.
При этом различают два вида управления такими преобразователями:
§ совместное, согласное управление;
§ раздельное управление;
При раздельном управлении отпирающие импульсы подаются только на силовые ключи той группы, которая участвует в преобразовании. Вторая группа при этом не работает. Такой способ управления обеспечивает системе лучшие массогабаритные показатели, однако обладает существенными недостатками по сравнению с системой с совместным управлением.
Поэтому чаще применяют преобразователи с совместным согласным управлением. При управлении таким способом отпирающие импульсы подаются на силовые ключи обеих групп, задавая одной группе режим выпрямления, а другой группе режим инвертирования. Углы управления α II и α II должны обеспечивать равенство модулей
/UdI/=/Ud II /
При этом сумма UdI+Ud II =0
При этом, это означает, что αI+ α II =π
α I=βI или βI= α II
Пусть преобразовательная группа I работает в режиме выпрямления, а преобразовательная группа II в режиме инвертирования. Пусть при этом модули /UdI/=/Ud II />Ед, Ед- ЭДС двигателя.
Двигатель работает в двигательном режиме, рабочая точка располагается в первом квадранте.
При этом токи через силовые ключи второй группы не протекают, т.к. не выполняется четвертое условие инвертирования, т.е. силовые ключи второй группы закрыты. Вторая группа находится в режиме ожидания или готовности. Ток через якорную цепь двигателя протекает под действием напряжения которое как известно больше ЭДС двигателя.
 >Ед
>Ед
Для того, чтобы перейти в режим рекуперативного торможения необходимо обеспечить выполнение четвертого условия инвертирования. Для этого увеличивают углы α I и β I до тех пор пока Ед не станет больше чем /Ud2/, т.е.
 >
> 
При этом во второй группе обеспечивается режим инвертирования. Закрываются силовые ключи первой группы и ток в якорной цепи двигателя протекая под действием Ud II, изменит свое направление.
Соответственно изменяет свое направление электромагнитный момент двигателя и рабочая точка переходит во второй квадрант координатной плоскости.
Для того, чтобы дальнейшее торможение двигателя происходило в рекуперативном режиме, т.е. с отдачей энергии в питающую сеть через согласующий трансформатор необходимо поддерживать соотношение
>|Ud II |
для чего увеличивают β II в процессе торможения.
Семейство механических характеристик имеет вид аналогичный характеристике однокомплектного преобразователя. При некотором значении β II, угловая скорость  становится равной 0.
становится равной 0.
Для того чтобы реверсировать двигатель, необходимо второй преобразовательный комплект перевести в режим выпрямления, а первый в режим инвертирования. При этом ток в якорной цепи будет протекать под действием Ud II, т.е. в том же направлении, но при этом |Ud II |>Ед- это уже режим выпрямления.
Существенным недостатком работы двухкомплектного преобразователя при совместном управлении является наличие уравнительных токов протекающих по внутренним контурам обеих преобразовательных групп под действием разности мгновенных значений напряжений на зажимах двух групп. Эти токи могут оказаться весьма существенными и при определенных условиях приводят к перегреву силовых ключей. Для того чтобы ограничить эти токи применяют ограничительные реакторы L01, L02, L03, L04, которые подбираются так, чтобы уравнительный ток составлял величину:
Iу=0,1 Id
При таких условиях этот недостаток обеспечивает системе с совместном управлением некоторые преимущества по сравнению с системой с раздельным управлением.
§ это система обеспечивает большую точность преобразования при работе на малых нагрузках, так как в такой системе отсутствует область прерывистых токов и при этом механические характеристики будут пересекать ось ординат в точках ω0, чем обеспечивается точность регулирования при малых нагрузках на валу двигателя.
2.4.8.Преимущества системы УСП-Д (по сравнению с системой Г-Д):
1)Значительно лучшие массогабаритные показатели; 2)Отсутствие вращающихся частей;
3) Значительно надежнее;
4) Более высокий КПД за счет однократного преобразования энергии.
Недостатки системы УСП-Д:
1)Плохая совместимость с питающей сетью. Угол сдвига фаз между напряжением и током во вторичной обмотке входного трансформатора ф примерно равен углу управления а, поэтому при больших углах управления, угол ф становится близким к  , а учитывая то, что токи в первичной и вторичной обмотках трансформатора практически совпадают по фазе, устройство в целом начинает потреблять большое количество реактивной мощности, «загрязняя» при этом сеть. Кроме того, форма напряжения и тока (У преобразователя отличается от синусоидальной. И поэтому преобразователь является генератором высших гармоник в сеть;
, а учитывая то, что токи в первичной и вторичной обмотках трансформатора практически совпадают по фазе, устройство в целом начинает потреблять большое количество реактивной мощности, «загрязняя» при этом сеть. Кроме того, форма напряжения и тока (У преобразователя отличается от синусоидальной. И поэтому преобразователь является генератором высших гармоник в сеть;
2) Наличие области прерывистых токов, что не позволяет регулировать скорость двигателя в режиме, близком к XX (в режиме малых нагрузок);
• 3) Несколько меньшие функциональные возможности системы
УСП-Д по сравнению с системой Г-Д, в частности, сложность реализации реверса и рекуперативного торможения.
В существенной мере избавиться от главного недостатка в системе УСП-Д, а именно, низкого коэффициента мощности, позволяет использование широтно-импульсного регулятора (ШИР) в место управляемого статического преобразователя.
Рассмотрим работу системы ШИР-Д (рис.31:а), б), в), г), д), е), ж)-граф.прил-я).
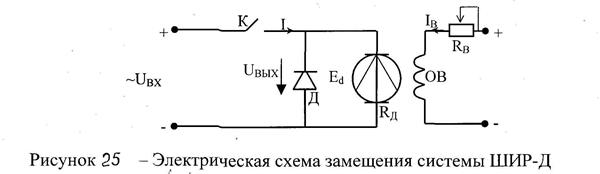
На схеме (замещения рис.31а,граф.прил.) ШИР представлен в виде силового ключа К (в качестве которого используют мощные тиристоры, реже транзисторы), который с частотой 600-800 Гц замыкаясь и размыкаясь, соответственно подключает и отключает цепь якоря к питающей сети. Питающая сеть в данном случае представляет собой постоянное. идеально сглаженное напряжение UBx. (промышленная сеть постоянного напряжения). Диод Д, который носит название «обратный диод», шунтирует обмотку якоря двигателя и служит для того, чтобы в разомкнутом положении ключа К, ток в цепи якоря протекал непрерывно под действием ЭДС.
|

|

|
Если обозначить длительность нахождения ключа К в замкнутом положении за t], а в разомкнутом положении -12, и при этом не изменяя суммы (tiH-t2), которая называется периодом коммутации, изменять соотношение между ti и t2, то отношение
Частота замыкания и размыкания 600-800 Гц выбрана с целью снижения коммутационных перенапряжений в ключе К.
Временные диаграммы мгновенных значений системы ШИР-Д представлены на рис.25 и 31 б),в),г),д)- графического прилажения.
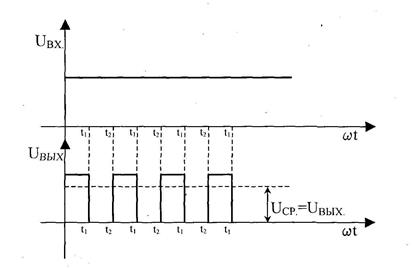
Рисунок 26 - Временные диаграммы мгновенных значений системы ШИР-Д
|
|
Выходное напряжение ШИР представляет собой высокочастотную последовательность импульсов одинаковой ширины и амплитуды, и при этом среднее значение этого напряжения будет зависеть от соотношения ширины импульса t1 и промежутка между двумя соседними импульсами t2, которая определяется как скважность. Изменяя скважность от нуля до единицы, можно изменять выходное напряжение от нуля до UBx. (при е =0,  ; при е =1, Uвых = Uвх ).
; при е =1, Uвых = Uвх ).
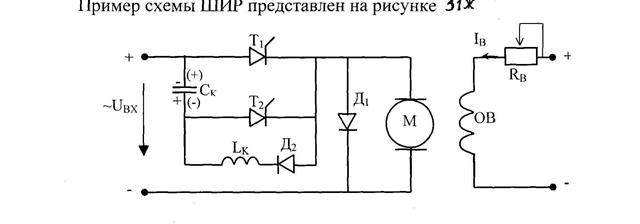
Пусть в момент времени t=0 главный тиристор Ti открыт, а вспомогательный тиристор Т2 закрыт. При этом входное напряжение UBx. приложено к якорной цепи. Ключ К замкнут. Конденсатор Ск предварительно заряжен в направлении, указанном на схеме (рис. 26 )•
По истечении времени tb подается отпирающий импульс на Т2, при этом он отпирается и через открытую цепь тиристора Т2 конденсатор Ск разряжается на Ti в направлении отрицательной полярности и запирает тиристор TV
В следующем промежутке времени t2 ключ К разомкнут и напряжение со стороны входной сети от цепи якоря отключено. В этом промежутке времени ток в цепи якоря протекает через цепь Д] под действием ЭДС двигателя. Одновременно в этом промежутке времени t2 через открытый тиристор Т2 происходит колебательный перезаряд конденсатора Ск через Т2, Д2 и LK в направлении, указанном в скобках (рис. 26 ).
По истечении времени t2 подается отпирающий импульс на TV В результате тиристор Т] отпирается, к якорной цепи прикладывается напряжение UBx., а через открытую цепь Т] конденсатор Ск разряжается на Т2 в направлении отрицательной полярности и запирает его.
| При этом семейство механических характеристик системы ШИР-Д представлено на рис. 28 . |
Уравнение механических характеристик системы ШИР-Д
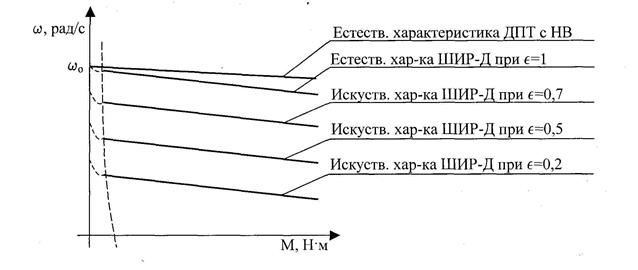
Рисунок 28 - Семейство механических характеристик системы ШИР-Д
Естественная характеристика ШИР-Д несколько мягче естественной характеристики ДПТ НВ за счет влияния активного сопротивления R-шир при питании от сети.
Искусственные характеристики ШИР-Д параллельны естественной характеристике ШИР-Д. Наличие нерегулируемой зоны в области малых скоростей объясняется тем, что при скоростях, близких к нулю, ЭДС двигателя
также стремиться к нулю (Ед=кФсо). И в промежутке времени t2 ток в якорной цепи протекать не будет, следовательно, момент отсутствует (М=кФ1). Преимущества системы ШИР-Д по сравнению с системой Г-Д:
1) Лучшие массогабаритные показатели;
2) Высокий КПД.
Преимущества системы ШИР-Д по сравнению с системой УСП-Д:1) Отсутствие отрицательного влияния на питающую сеть.
Недостатки системы ШИР-Д:
1) Необходимость в наличии идеально сглаженного входного напряжения;
2) Ограничения по мощности (силовой ключ ШИР должен быть по мощности согласован с двигателем), и поэтому такие системы применяют только в приводах небольшой мощности.
Дата добавления: 2017-11-21; просмотров: 1413;
Поиск по сайту
Узнать еще
- I. Режимы работы электротехнических устройств.
- II. Принцип действия и режимы работы синхронной машины
- MS Word: проверка орфографии, поиск и замена, режимы просмотра документа (обычный, разметки страницы, структура).
- Аварийные режимы в АЭП с ПЧ с ШИМ.
- Аварийные режимы в электросетях
- Автоматические регуляторы режимов торможения (авторежимы)
- Авторежимы усл.№ 605, 606
- Авторитарные режимы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
