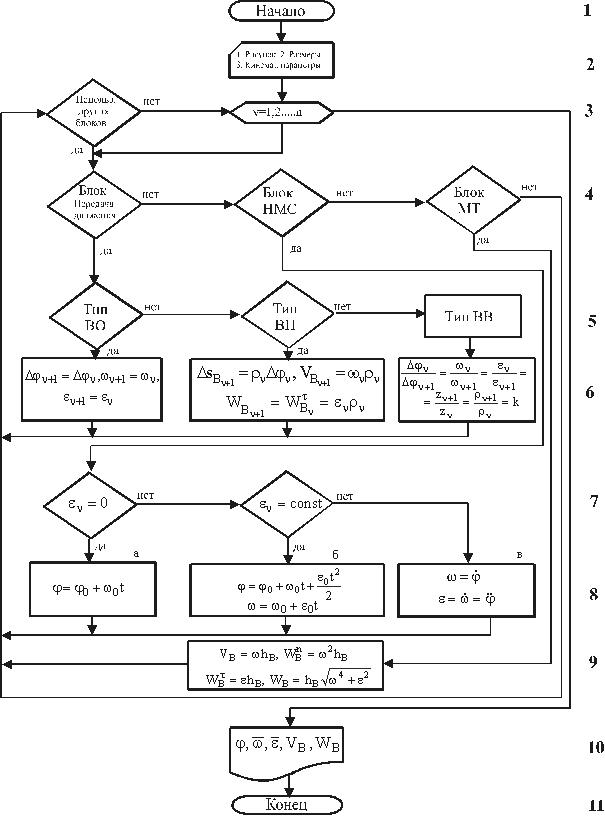
Алгоритм решения задач кинематики вращательного движения НМС вокруг неподвижной оси – схема алгоритма К03 ВДТ с комментариями и примерами
Комментарии
К.2Принимается рассматриваемый объект или за МТ, или АТТ, или НМС, или МС.
К.3Выделяются и нумеруются в случае МС, входящие в нее МТ, АТТ и НМС.
Определяются для МТ, АТТ и НМС виды движений, которые они совершают.
К.4В каждом цикле решение может складываться из трех частей, называемых блоками:
Используется Блок - передача движения только для МС. Он позволяет определить связь между кинематическими параметрами объектов, входящих в МС, при преобразовании простейших движений.
Используется Блок — НМС для определения кинематических параметров АТТ и НМС.
Используется Блок — МТ для определения кинематических параметров МТ, входящих или в АТТ, или НМС, или МС.
Определяется из условий задачи, к какому из трех блоков относятся заданные кинематические параметры и к какому те, которые необходимо определить.
Определяется порядок использования блоков в каждом цикле. В каждом цикле могут быть использованы один, два, три блока в любом необходимом порядке. Второй и третий блоки могут быть использованы несколько раз для различных моментов времени, а третий еще и для различных МТ, входящих или в АТТ, или НМС, или МС.
К.5 Используются соотношения между кинематическими параметрами МТ, АТТ и НМС, входящих в МС, исходя из типов передач простейших движений, которые приведены в таблицах 1-3.
К.7Определяется возможность использования формул для:
· равномерного вращательного движения АТТ или НМС вокруг неподвижной оси:  ;
;
· равнопеременного вращательного движения АТТ или НМС вокруг неподвижной оси:  .
.
К8а,бИспользуются следующие формулы, если вращательное движение АТТ или НМС задано:
· через N — число оборотов:  ;
;
· через n об/с — число оборотов в секунду:  ;
;
· через n об/мин — число оборотов в минуту:  .
.
К.8вРешаются в общем случае вращательного движения СМТ вокруг неподвижной оси, как прямая задача (зная j, найти w, e) – дифференцированием, так и обратная (зная e, найти w, j) –интегрированием с учетом начальных условий.
К.9Решается в Блоке — МТ, как задача определения кинематических параметров МТ (  ) по известным кинематическим параметрам АТТ или НМС (
) по известным кинематическим параметрам АТТ или НМС (  ), так и обратная задача.
), так и обратная задача.
В уровнях 8, 9 для компактности опущены индексы n.
К.10Изображаются на чертеже аналогично рис. 19 все полученные для определенного момента времени кинематические параметры МТ и НМС.
Примечание
Схема алгоритма К03 ВРД может быть использована при рассмотрении движения МТ по окружности.
Пример 1
2 Ротор турбины делает 6000 об/мин. После прикрытия маневрового клапана ротор через 8с стал делать 3600 об/мин. Считая вращение ротора равнозамедленным, определить количество оборотов, которые сделал ротор за эти 8с, а также скорость, нормальное и касательное ускорения точки лопатки ротора, отстоящей от оси вращения на расстоянии 0.5м, спустя 4с после прикрытия клапана.
Ротор турбины принимается за АТТ.
Кратко условия задачи имеют вид:
Дано:  ,
,  ,
,  ,
,  , t=8c., hВ=0,5 м.
, t=8c., hВ=0,5 м.
Определить:  ,
,  ,
, 

3 n=1
4 Заданные кинематические параметры относятся к Блоку - НМС. Кинематические параметры, которые необходимо определить, относятся, как к Блоку - НМС: , e,  для двух моментов времени, так и к Блоку - МТ:
для двух моментов времени, так и к Блоку - МТ:  ,
,  ,
,  .
.
Исходя из этого, сначала будет использован дважды Блок - НМС, а затем Блок - МТ.
Блок - Передача движения в этой задаче не нужен, т.е. уровни 5 и 6 пропускаются.
4 Блок НМС для t=8c.
7б .
8б  .
.
Здесь , , где ,
 ,
,  , t=8c,
, t=8c, 
Решается система 8б двух уравнений с неизвестными:  ,
,  .
.
Из второго уравнения системы 8б :  .
.
Из первого уравнения системы 8б:
 , тогда
, тогда  об.
об.
3 Нужен Блок-НМС.
4 Блок -НМС для t=4с.
7б  .
.
8б Из второго соотношения  .
.
3 Нужен Блок - МТ
4 Блок-МТ для t=4c.
9 B - точка лопатки ротора , hВ=0,5 м.
 ,
,  ,
,  .
.
10 Ответ:  об,
об,  ,
,
 ,
,  .
.
Пример 2
2 Груз Р, соединенный нерастяжимой нитью с системой вращaю-
щихся АТТ (рис. 20), перемещается вниз по закону  см.
см.
Определить скорости и ускорения точек  колеса 5 и
колеса 5 и  стержня 7 в момент времени t=2c, если
стержня 7 в момент времени t=2c, если  см ,
см ,  см,
см,  см,
см,  см ,
см ,  см.
см.
Рассматриваемый объект принимается за МС, состоящую из МТ – груза Р, совершающего прямолинейное движение и шести АТТ: 2–7, совершающих вращательное движение вокруг неподвижных осей.
3 n=7.
n=1.
4 Для первого звена - груза Р все три блока не нужны.
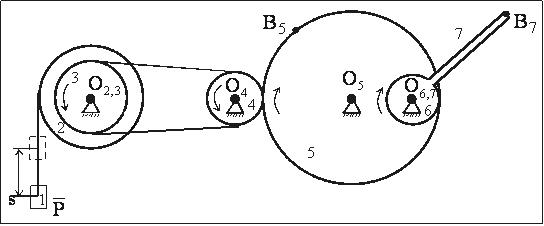
Рис. 20
n=2.
4 Для второго звена необходимо определить кинематический параметр  , следовательно, используется только
, следовательно, используется только
Блок - Передача движения .
5 Тип ВП.
6  , так как
, так как  , то
, то  .
.
n=3.
4Для третьего звена необходимо определить кинематический параметр  , следовательно, используется только
, следовательно, используется только
Блок - Передача движения.
 5 Тип ВО.
5 Тип ВО.
6  , так как
, так как  , то
, то
n=4.
4 Для четвертого звена необходимо определить кинематический параметр  , следовательно, используется только
, следовательно, используется только
Блок - Передача движения.
5 Тип ВВ.
6  , так как
, так как  , то
, то  .
.
n=5.
4 Для пятого звена необходимо определить: кинематический параметр  — используется Блок-Передача движения; кинематические параметры
— используется Блок-Передача движения; кинематические параметры  ,
,  – используется Блок-НМС и кинематические параметры
– используется Блок-НМС и кинематические параметры  ,
,  – используется Блок-МТ.
– используется Блок-МТ.
Блок-Передача движения
5 Тип ВВ.
6  , так как
, так как  , то
, то 
Блок-НМС
7  .
.
8в  ,
,  .
.
Блок-МТ
9 
 .
.
n=6.
4 Для шестого звена необходимо определить кинематический параметр  , следовательно, используется только
, следовательно, используется только
Блок-Передача движения.
5 Тип ВВ.
6  , так как
, так как  , то
, то  .
.
n=7.
4 Для седьмого звена необходимо определить: кинематический параметр  – используется Блок-Передача движения; кинематические параметры
– используется Блок-Передача движения; кинематические параметры  – используется Блок-НМС и кинематические параметры
– используется Блок-НМС и кинематические параметры  – используется Блок-МТ.
– используется Блок-МТ.
Блок-Передача движения
5 Тип ВО.
6  , так как
, так как  , то
, то  .
.
Блок-НМС
7  .
.
8в  ,
,  .
.
Блок-МТ
9 

10Ответ: 

Все найденные кинематические параметры точек и  изображены на рис. 21.
изображены на рис. 21.
Рис. 21
Дата добавления: 2016-06-05; просмотров: 2938;
Поиск по сайту
Узнать еще
- A Схема затяжки болтов ГБЦ; болты 5 и 7 длиннее остальных и устанавливаются в свои места
- A. Линейный алгоритм
- I серия. ДВИЖЕНИЯ ВЫПОЛНЯЮТСЯ НА КОЛЕНЯХ.
- I. Решение логических задач средствами алгебры логики
- I.4.2 ОСНОВНОЙ ЗАКОН ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- I.4.3 РАБОТА. МОЩНОСТЬ. ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- II серия. ДВИЖЕНИЯ ВЫПОЛНЯЮТСЯ СТОЯ.
- II серия. КОСИ-ВАДЗА.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
