Изучение конструкции захватных устройств промышленных роботов
Таблица 1.
| Размеры захватываемого объекта | Кол-во одновременно захватываемых объектов, шт. | Подача в зону обработки | |||
| по наружному диаметру, мм | по внутреннему диаметру, мм | толщина, мм | с поворотом | без поворота | |
| + |
В соответствии с заданием выбираем захватное устройство С04 (Рис. 1).

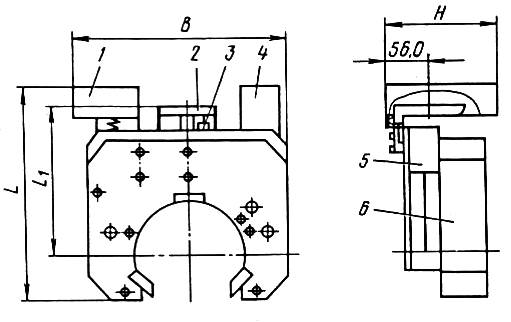
Рис. 1 Захватное устройство С04: 1- блок пневмораспределителей; 2- кронштейн предохранительный; 3- панель; 4- коробка электроразъема; 5- механизм поворота;
6- захватывающий механизм.
Таблица 2.
| Наименование параметров | С 04 |
| Количество одновременно зажимаемых объектов | |
| Основные размеры захватываемого объекта, мм: по наружному диаметру по внутреннему диаметру зажим плоских деталей (толщиной) | |
| Время захватывания, с., не более | |
| Время отпускания, с., не более | |
| Габаритные размеры без учета электро- и пневмоприводов, мм, не более L B H | |
| Разрешающая способность по устранению нецентричности положения жестко закрепленной заготовки | - |
| Суммарное усилие захватывания всеми пальцами, Н, не более | |
| Масса захватного устройства, Н, не более | |
| Номинальное давление рабочего тела, МПа | 0,63 |
| Угол поворота вокруг оси зажимаемой заготовки, град, не менее | |
| Время поворота, с., не более | |
| Минимальное давление рабочего тела, МПа | 0,5 |
| Максимальная грузоподъемность, кг. | |
| Расстояние от оси зажимаемого предмета до привалочной плоскости, мм, L1 |
Устройство и работа захватного устройства и его составных частей.
1. Предохранительный кронштейн (рис.2) состоит из самого кронштейна 1, имеющего ослабленное сечение для излома на случай перегрузки захватного устройства и двух пластин 2. Пластины 2 предназначены для удержания захватного устройства в случае поломки кронштейна.
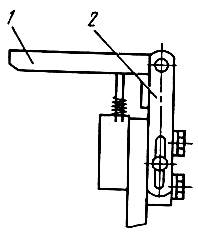
Рис. 2 Кронштейн предохранительный.
2. Панель крепления микровыключателя (рис.3) состоит из корпуса 1, крышки 2, подпружиненного стержня 3. Стержень 3 соединяет микровыключатель, закрепленный на корпусе 1, с кронштейном на упор. В случае излома стержень 3 перемещается, и микровыключатель подает команду на отключение робота.
Рис. 3 Панель крепления микровыключателя.
3. В захватном устройстве С04 применяется центростремительный зажимной механизм (рис.4). В нем три держателя. Механизм включает в себя двух или трех поршневой цилиндр 4, шестеренчатую систему 5, конечные выключатели 6.
Держатели 1, 3 связаны между собой шестеренчато-рычажной системой.
Держатели 2 связан с держателем 1 с помощью рычага. Держатели 1, 2, 3 центростремительно и синхронно расходятся при толкающем движении цилиндра и сходятся при тянущем его движении.
Полностью открытое и полностью закрытое положения держателей определяются двумя микропереключателями.
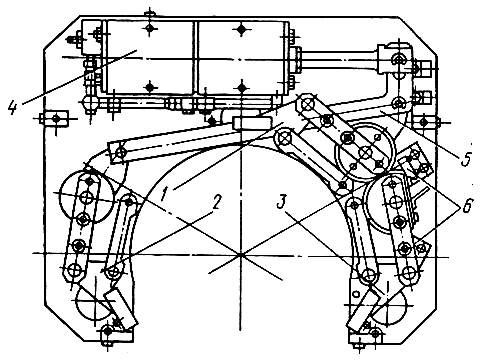
Рис. 4 Центростремительный зажимной механизм.
4. Механизм поворота, применяемый в захватном устройстве С 04, показан на рис. 5. Он состоит из цилиндра 5 с гибким штоком, пневмораспеределителя для управления подачей воздуха в цилиндр, тросика 3 для преобразования обратно – поступательного движения поршня во вращательное движение несущего кольца 1, направляющих несущего кольца 2, конечного выключателя 6, определяющего положение начальной точки вращения. Гибкий шток цилиндра фиксируется на поршне и выводится сквозь противоположные концы цилиндра, и, пройдя через два направляющих блока 4, крепится на несущем кольце.
Механизм вращения имеет ограничитель угла поворота в виде стопора. Гибкий шток цилиндра может быть развернут на 90º по или против часовой стрелки по отношению к нулевой точке конечного выключателя - определителя начальной точки вращения с целью изменения направления вращения.
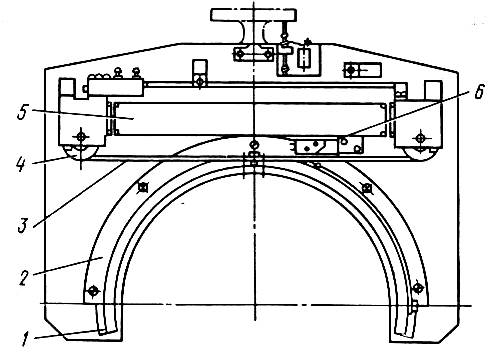
Рис. 5 Механизм поворота.
5. Схема пневмооборудования (рис.6)
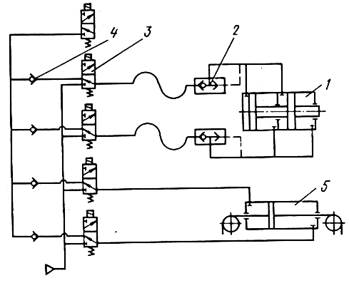
Рис. 6 Схема пневматическая захватного устройства СО4: 1- цилиндр; 2- клапан быстрого выхлопа; 3- пневмораспределитель; 4- обратный клапан; 5- цилиндр с гибким штоком
| <== предыдущая лекция | | | следующая лекция ==> |
| Современные направления развития инверторов | | | ОСНОВЫ ПРОЕКТИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ ЭЭС |
Дата добавления: 2017-10-04; просмотров: 1120;
Поиск по сайту
Узнать еще
- I. Режимы работы электротехнических устройств.
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- II. Особенности политического устройства Ирана
- IV. Термодатчики, их устройство и назначение.
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. УСТРОЙСТВО ВЫХОДОВ ИЗ ГОРНЫХ ВЫРАБОТОК

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
