Векторно-матричные математические модели ЭМС
При исследовании систем управления с научными или инженерными целями в большинстве случаев приходится иметь дело с двумя типами задач, К первому типу можно отнести задачи анализа, когда требуется определить характеристики заранее заданной системы. Ко второму типу- задачи синтеза, когда требуется спроектировать систему, обладающую заданными характеристиками. Существует два основных подхода к анализу и синтезу линейных систем управления.
Первый подход сводится, по существу, к составлению блок схемы системы или структурной схемы и определению передаточных функций отдельных элементов и всей системы.
Второй подход основан на возможности описания поведения системы некоторым количеством уравнений первого порядка относительно переменных состояния с начальными условиями. Методы анализа и синтеза систем управления, использующие этот способ описания поведения системы, принято называть методами пространства состояния. Этот подход лежит в основе современной теории управления.
Понятие “состояние”, лежащее в основе современного подхода к описанию поведения ЭМС, было впервые введено Дъюрингом в 1936 году. Начало широкому использованию этого подхода для решения задач ТАУ положили в 40-х годах Российские ученые Айзерман, Фельдбаум, Летов, Лурье.
При анализе и синтезе систем все переменные, характеризующие систему или имеющие к ней прямое отношение делятся на входныепеременные, представляющими собой управляющие и возмущающие воздействия ui, выходные переменные Xi, характеризующие реакцию системы и предсталяющие интерес для исследователя и промежуточные переменные Yi или переменные состояния, характеризующие динамическое поведение исследуемой системы (см. рис. 2.1).
Рис.2.1
Для удобства оперирования с многомерными величинами совокупность входных переменных представим в виде вектора входа
UT=[u1 u2 ....ur],
совокупность выходных переменных - в виде вектора выхода
XT=[x1 x2 ....xm],
и совокупность переменных состояния- в виде вектора состояния
YT=[y1 y2 ....yn].
В любой момент времени t состояние системы является функцией начального состояния Y(t0) и вектора входа U(t 0, t), т.е.
Y(t)= F[ Y(t0), U(t0,t)], 
 (2.1)
(2.1)
гдеF- однозначная функция своих аргументов.
Вектор выхода в момент времени t является также функцией Y(t0) и U(t 0, t) и может быть записан как
X(t)= Y [ Y(t0), U(t0,t)]. (2.2)
Уравнения 2.1 и 2.2 называются уравнениями состояния системы. Для систем, описываемых дифференциальными уравнениями, уравнения 2.1 и 2.2 могут быть записаны в следующей общей форме
dY(t)/dt= F*[ Y(t0), U(t0,t), (2.3)
dX(t)/dt= Y *[ Y(t0), U(t0,t)]. (2.4)
Если система описывается линейными дифференциальными уравнениями с постоянными коэффициентами, то уравнения состояния системы сводятся к следующим:
dY/dt=AY+BU, (2.5)
X=CY+DU, (2.6)
где
A- квадратная матрица размером nxn, называемая матрицей системы и. характеризующая динамические свойства системы;
B-прямоугольная матрица размером nxr, называемая матрицей управления. Она характеризует воздействие входных переменных ui на переменные состояния yi .
C- матрица измерения размера mxn. Она характеризует связь выходных координат xi ( как правило это измеряемые переменные) с переменными состояния yi.
D- матрица размера mxr, характеризующая непосредственное воздействие входов u i на выходы x i
Вывод уравнений состояния является исходным моментом анализа и синтеза систем в современной теории управления ЭМС.
В качестве примера рассмотрим электродвигатель постоянного тока с независимым возбуждением, конструктивными постоянными Cе и Cм , моментом инерции ротора J, моментом нагрузки на валу Мс , управляемый по цепи якоря изменением напряжения uя. Двигатель описывается двумя уравнениями: уравнением равновесия напряжений в цепи якоря
uя =L я di я /dt + Rя i я + Cе w (2.7)
и уравнением равновесия моментов на валу (уравнением Ньютона)
Jdw /dt= Cм i я - Мс (2.8)
Разрешив эти уравнения относительно производных, получим

Примем в качестве переменных состояния скорость вращения ротора y1=w и ток якоря y2 =i я ДПТ, а в качестве выходной переменной – противо ЭДС двигателя x1 = Cе w . Приводя систему (2.9) к матричной форме (2.5) и (2.6), получим
Полученные формулы 2.10-2.12 представляют собой векторно-матричную математическую модель двигателя постоянного тока .
Составим далее векторно-матричную модель механической системы, состоящей из груза с массой m, подвешенного на пружине с коэффициентом упругости k и двигающегося в цилиндре с коэффициентом трения f под действием управления u(t) - внешней силы (см. рис. 2.2 ).
Дифференциальное уравнение, описывающее поведение системы имеет вид
m d2z/dt2 +f dz/dt + kz=u(t) (2.14)
Примем в качестве переменных состояния -линейное перемещение груза y1=z и линейную скорость перемещения груза y2=dz/dt.
Тогда имеем y2=dy1/dt и d2z/dt2 = dy2/dt.
Рис.2.2.
В качестве выходной переменной x1 примем линейное перемещение груза z, т.е. x1= y1=z. Следовательно, с учетом введенных обозначений уравнение (2.14) можно представить системой уравнений состояния вида
Записывая систему (2.15) в матричной форме (2.5)-(2.6), получим векторно-матричную модель рассматриваемой механической системы в виде
ПЕРЕДАТОЧНЫЕ МАТРИЦЫ СИСТЕМ
Научившись составлять векторно-матричные уравнения в форме переменных состояния, теперь необходимо выяснить, как эти уравнения и соответствующие им матрицы связаны с уже известными понятиями передаточной функции, характеристического уравнения и т.д.
С этой целью применим преобразование Лапласа при нулевых начальных условиях к уравнениям состояния системы в форме (2.5). Тогда
pY(p) = AY(p) +BU(p)
X(p)=CY(p)
Теперь вместо векторных переменных Y(t), U(t) и X(t), являющихся функциями времени, мы имеем дело с их изображениями в области комплексной переменной p; в то же время A, B и C-матрицы соответствующих размеров с постоянными элементами остаются неизменными.
В первом уравнении перенесем AY(p) в левую часть и использовав соотношение pY(p)= p1Y(p) (где 1-единичная матрица размером nxn), представим первое уравнение в виде
(p1- A) Y(p)=BU(p)
Отсюда
Y(p)= (p1- A)-1 BU(p)
и следовательно
X(p)=C(p1- A)-1 BU(p)
Вводя обозначения
G(p)=(p1- A)-1 B, H(p)= C(p1- A)-1 B,
запишем
Y(p)=G(p) U(p), X(p)= H(p)U(p) (*)
Матрица H(p) размером mxr (т.к. X(p) это-вектор размера m, U(p)-вектор размера r) называется передаточной матрицей вход -выход системы. Элемент Hij этой матрицы представляет собой обычную передаточную функцию от j-го входа к i-му выходу. Это сразу становится ясным, если выписать отдельно i-ю строку равенства (*), предварительно выполнив умножение на U(p)
xi(p)=Hi1(p) u1(p) +....+Hij(p) uj(p) +....+Hir(p) ur(p)
Если система имеет один вход и один выход (m=r=1), то передаточная функция вырождается в обычную передаточную функцию. В этом случае можно написать
H(p)= X(p)/ U(p)
В многомерном случае эта запись недопустима, т.к. операция деления на вектор не имеет смысла.
МатрицаG(p) размером nxr называется передаточной матрицей вход- состояние.
Найдем передаточную матрицу H(p) для рассмотренного выше двигателя постоянного тока. Предварительно вспомним, что операция обращения некоторой квадратной матрицы Фможет быть выполнена по формуле
где присоединенная матрица T
получается из матрицы Ф заменой каждого элемента j ij его алгебраическим дополнением D ij с последующим транспонированием полученной матрицы.
Для рассмотренного ДПТ имеем
Следовательно
Отсюда
Первый и второй элементы полученной матрицы представляют собой соответственно передаточные функции “ЭДС- напряжение на якоре” и “ЭДС-момент нагрузки”. Вводя обозначения

| (постоянная времени цепи якоря) и |

| электромеханическая постоянная времени ДПТ, |
окончательно получим
Так как в передаточные матрицы
G(p)=(p1- A)-1 B
и
H(p)= C(p1- A)-1 B,
входит выражение (p1- A)-1,то все элементы этих матриц, т.е. передаточные функции системы, содержат выражение det(p1-A),являющееся характеристическим полиномом системы. Корни этого полинома называются собственными числами матрицы A.
СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ В ПЕРЕМЕННЫХ СОСТОЯНИЯ
Из материала лекции 2 видно, что определение передаточной функции системы по уравнениям состояния требует обращения матрицы (p1-A), что в случае высокой размерности последней может представить значительные трудности. Использование структурной схемы системы в переменных состояния существенно облегчает поставленную задачу.
На рис. 3.1 показана обобщенная структурная схема системы, соответствующая векторно-матричным дифференциальным уравнениям (2.5) и (2.6).
Жирные линии на рисунке характеризуют векторные связи. Символ 1/p означает операцию интегрирования.
Рис.3.1.
Матричную структурную схему используют при описании сложных многосвязных систем.
На практике более удобными являются детализированные структурные схемы или схемы в переменных состояния. Они состоят только из элементарных звеньев: интегрирующих, усилительных и суммирующих. Говоря строго, детализированная структурная схема (ДСС) - это математическая модель, состоящая только из элементарных звеньев -интегрирующих, масштабирующих и суммирующих, в том числе нелинейных, с полностью вскрытыми связями между ними. Выходные переменные интеграторов принимаются в качестве переменных состояния.
ДСС для системы первого порядка легко получается из обобщенной векторно-матричной структурной схемы. Так в случае, если A=a, B=b, C=c, D=d, имеем
Рис.3.2.
В частности b=a=1/T, c=1, d=0 имеем детализированную структурную схему
Рис.3.3
апериодического звена первого порядка с передаточной функцией
Схему в переменных состояния можно составить либо непосредственно по уравнениям состояния, либо по передаточным функциям.
СОСТАВЛЕНИЕ ДСС ПО УРАВНЕНИЯМ СОСТОЯНИЯ
Для составления ДСС по уравнениям состояния целесообразно
1. Изобразить n интегрирующих звеньев с передаточными функциями 1/p, где n - порядок системы. Обратим внимание на то обстоятельство, что выходной величиной интегратора является переменная состояния yi, а входной - ее производная d yi /dt, т.е.
2. Используя операции суммирования и масштабирования, организовать связи между входами и выходами интеграторов в соответствии с уравнениями (2.5).
3. Используя операции суммирования и масштабирования , огранизвать связи между переменными состояния в соответствии с уравнениями (2.6).
В качестве примера составим ДСС уже известного нам ДПТ по его уравнениям (2.9)
Рис. 3.4.
Рис. 3.5.
Составив схему в переменных состояния и применив правила преобразований, легко составить по ней передаточные функции по всем координатам и управляющим воздействиям. Определим, например, уже известные нам передаточные функции ДПТ на основании преобразованной структурной схемы, приведенной на рис. 3.6.
Рис. 3.6.
Итак в ряде случаев короче оказывается путь нахождения передаточной функции по уравнениям состояния через ДСС и ее эквивалентные преобразования.
СОСТАВЛЕНИЕ ДСС ПО ПЕРЕДАТОЧНОЙ ФУНКЦИИ
Схема системы в переменных состояния может быть составлена по передаточной функции тремя способами: методом прямого программирования, методом параллельного программирования и методом последовательно программирования.
Метод прямого программирования
Этот метод позволяет представить систему уравнений состояния в нормальной канонической форме по известной передаточной функции звена или системы с одним входом и одним выходом.
Известно, что системе с передаточной функцией

соответствует дифференциальное уравнение

или
N(p) x= M(p) u,
где Pi = di / dti
Рассмотрим вначале систему с передаточной функцией
 , (4.1)
, (4.1)
которой соответствует дифференциальное уравнение
 (4.2)
(4.2)
Введем обозначения: y1= x1 и  при i=1, 2, .... n-1. и запишем последнее уравнение в виде
при i=1, 2, .... n-1. и запишем последнее уравнение в виде

Следовательно, система уравнений состояния, соответствующая передаточной функции (4.1) , м.б. записана в виде


. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
Записывая эту систему в векторно -матричной форме, получим
A=  B=
B=  CТ =
CТ = 
Используя уже известные правила, построим ДCС по уравнениям состояния в виде рис. 4.1. :
Рис. 4.1.
Рассмотрим теперь систему с передаточной функцией
 , (4.3)
, (4.3)
которой соответствует дифференциальное уравнение
 (4.4)
(4.4)
Подстановкой x1=x2/ b0 уравнение (4.4) сводится к (4.2) и следовательно ,
- уравнения состояния, соответствующие передаточным функциям (4.1) и (4.3) разнятся только масштабом выходной переменной и, следовательно, только элементами матрицыС. Для последнего случая
C= 
- в ДСС появляется дополнительное масштабирующее звено с коэффициентом передачи b0 , со входом y1 и выходом x2 . Это звено выделено жирной штриховой линией на рис. 4.1.
Рассмотрим далее систему с передаточной функцией
 (4.5)
(4.5)
Этой передаточной функции соответствует дифференциальное уравнение
 (4.6)
(4.6)
Выходную величину Xi можно представить в операторной форме выражением
Переходя к функции времени, получим
Следовательно, ДСС данной системы с передаточной функцией (4.5) может быть получена из ДСС уже известной системы путем введения масштабирующего звена с коэффициентом передачи bi, входом yi+1 и выходом xi. В уравнениях состояния изменятся лишь элементы матрицыС. Последняя будет иметь вид
C= 
Таким образом выходную величину исходной системы с передаточной функцией

можно представить в виде суммы в соответствии с числом слагаемых полинома числителя M(p), т.е.
Переходя к функции времени, получим

или с учетом ранее введенных обозначений

Следовательно, структурная схема исходной системы отличается от ранее полученных наличием полного набора масштабирующих звеньев ( всего их m+1 ) c коэффициентами передачи bi в цепи формирования выходной переменной x. (см. рис. 4.1.)
Матрицы А и В всех рассмотренных систем одинаковы. Их элементы формируются из коэффициентов полинома знаменателя передаточной функции.
Коэффициенты полинома числителя определяют только элементы матрицы С и влияют лишь на формирование выходной переменной. В последнем наиболее общем случае матрица С имеет вид
C= 
Пример1: Составить ДСС и систему уравнений состояния для звена с передаточной функцией
Приведем передаточную функцию звена к стандартному виду

 ,
,
где a0=1/T2, b0=1/T2, b1=T1/T2
Стандартной передаточной функции соответствует стандартная ДСС:
Рис. 4.2.
и система уравнений состояния первого порядка

Рассмотрим еще пример:
Составить ДСС и уравнения состояния для системы, заданной передаточной функцией
Приводя запись передаточной функции в стандартную форму, получим: a2=7, a1=12, a0=0, b2=1, b1=3, b0=2.
ДСС изобразим в стандартном виде
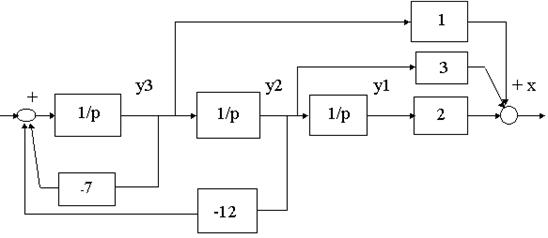
Рис. 4.3.
Система уравнений состояния для этого случая в обычной форме

В матричной форме
A=  B=
B=  CT=
CT=  D=0
D=0
ПАРАЛЛЕЛЬНОЕ ПРОГРАММИРОВАНИЕ
При указанном подходе передаточная функция исходной системы представляется в виде суммы передаточных функций однотипных звеньев следующим образом:

Здесь l i -корни полинома знаменателя передаточной функции, а a i - находятся по формуле
 при p=l i
при p=l i
Такая передаточная функция соответствует параллельному соединению n однотипных звеньев со структурными схемами, представленными на рис. 4.4 .
Рис. 4.4.
Выходные сигналы xi звеньев суммируются .
Используя эту методику, составим ДСС для рассмотренной выше системы. Корни знаменателя равны : l 1 =0, l 2=-3, l 3 =-4.
Вычисляя коэффициенты числителей, получим a 1=1/6, a 2=-2/3, a 3=3/2. Тогда структурная схема системы примет вид (рис.4.5.)
Рис. 4.5.
Этой структурной схеме соответствует следующая система уравнений состояния
A=  B=
B=  CT=
CT=  D=0
D=0
ПОСЛЕДОВАТЕЛЬНОЕ ПРОГРАММИРОВАНИЕ
Для составления ДСС этим методом исходная передаточная функция представляется в виде произведения дробно-рациональных функций, порядок полиномов знаменателя и числителя которых не превышает единицы. Если порядки числителя и знаменателя исходной передаточной функции одинаковы, т.е. m=n, то последняя записывается в виде
где bk и lk - соответственно корни полинома числителя (нули) и корни полинома знаменателя (полюса). Если n>m (что практически всегда имеет место), то (n-m) сомножителей имеют в числителе единицу. Стандартная ДСС для элементарной дробно-рациональной функции общего вида нами была ранее, по существу, обоснована. Она изображается в виде
Рис. 4.6.
Поскольку произведение передаточных функций соответствует последовательному соединению звеньев, ДСС исходной системы будет содержать n последовательно соединенных ДСС идентичной конфигурации.
Передаточную функцию уже рассмотренной системы представим в виде произведения трех дробей
ДСС соответствует последовательному соединению ДСС элементарных звеньев и имеет следующий вид
Рис. 4.7.
Этой ДСС соответствует следующая система уравнений состояния



 ,
,
в матричной форме принимающая следующий вид
A=  B=
B=  CT=
CT=  D=0
D=0
Следует подчеркнуть, что для одной и той же системы можно составить несколько схем в переменных состояния, отличающихся природой промежуточных переменных, выбранных для описания системы. Различному выбору переменных состояния соответствуют различные матрицы системы, управления и наблюдения и различные векторные дифференциальные уравнения.
Математические модели обобщенной ЭПС.
Как известно, ЭПС современной ЭМС функционально содержит три основных узла: механизм Мх, включающий передаточный механизм и рабочий орган. электромеханический преобразователь энергии ЭМП (электрическая машина) и управляемый преобразователь электрической энергии УП. Для анализа наиболее общих закономерностей, характерных для ЭМС при регулировании момента, скорости и положения независимо от технической реализации реальная ЭПС, как объект управления, часто заменяется математической моделью, называемой обобщенной энергетической подсистемой. Математическая модель содержит те же функциональные узлы , что и реальная ЭПС. Специфика конкретных систем отражается в значении обобщенных параметров.
Расчетные схемы и уравнения механической части.
В общем случае механическая часть представляет собой систему связанных масс, движущихся с различными скоростями вращательно или поступательно. При нагружении элементы системы (валы , опоры, клиноременные передачи, зубчатые зацепления и т.п., деформируются, так как механические связи не являются абсолютно жесткими. Входной вал механизма приводится во вращение со скоростью w 1 электромагнитным моментом M, возникающим на роторе ЭМП (двигателя).
Исследования динамики показывают, что в большинстве практических случаев реальные механизмы могут быть сведены к трехмассовой, двухмассовой и одномассовой расчетным схемам.
Параметрами обобщенной трехмассовой механической системы (рис. 5.1) являются суммарные приведенные моменты инерции масс J1, J2 и J3 и эквивалентные приведенные жесткости механических упругих связей C12 и C23.
Рис. 5.1.
Здесь Cik = d Mi / d j k - жесткость связи. При абсолютно жесткой связи соответствующий коэффициент равен ¥ .
Первая масса представляет собой ротор двигателя и жестко с ним связанные элементы. К этой массе приложен электромагнитный момент двигателя M и момент статической нагрузки Mc1. который обычно является суммарным моментом потерь на валу двигателя и жестко связанных с ним элементах. К промежуточной массе механизма приложен момент сопротивления Mc2 и к третьей - момент внешней нагрузки Mc3.
Трехмассовая модель при исследовании ЭМС используется в тех случаях, возникает необходимость более детального анализа условия движения масс механизма. Для решения задачи при этом обычно используется математическое моделирование на ЭВМ, поскольку аналитическое решение получается весьма громоздким.
Двухмассовая модель, упрощенно представленная на рис.5.2, наиболее удобна для изучения влияния упругости механических связей на поведение ЭМС и в данном курсе для нас будет являться основной.
Рис. 5.2.
Поведение двухмассовой системы можно описать следующей системой уравнений, составленных на основании второго закона Ньютона
Дифференцируя обе части уравнения 5.1, б, получим
В тех случаях, когда параметры системы таковы, что влияние упругих связей незначительно, или при решении задач, в которых с этим влиянием можно не считаться, механическая часть представляется простейшей расчетной схемой, не учитывающей влияние упругих связей-жестким приведенным звеном. В этом случае многомассовая система заменяется одной эквивалентной массой с моментом инерции JS , на которую воздействует электромагнитный момент двигателя M и суммарный приведенный к валу двигателя момент нагрузки Mc. Последний включает в себя все внешние силы, приложенные к механической системе, кроме момента двигателя M.
Приведем двухмассовую систему (рис.5.2) к одномассовой, предположив связь между первой и второй массами абсолютно жесткой. Отличием ее от ранее рассмотренной системы является равенство скоростей масс w 1 = w 2 = w . а также M12=0. Складывая уравнения 5.1 а и 5.1б , получим
JS dw /dt= M- Mc, (5.3)
где JS = J1+J2 и Mc= Mc1 + Mc2
Уравнение 5.3 представляет собой основное уравнение движения электропривода. Его значение для анализа физических процессов в ЭМС исключительно велико. Оно правильно описывает движение механической части любой ЭМС в среднем. Поэтому с его помощью можно по известному электромагнитному моменту двигателя и значениям JS и Mc оценить среднее значение ускорения электропривода, предсказать время, за которое двигатель достигнет заданной скорости и решить многие другие практические вопросы даже в тех случаях, когда влияние упругих связей в системе существенно.
Обобщенная модель ЭМП с линеаризованной механической характеристикой
Анализ электромеханических свойств двигателей различного вида показывает, что при определенных условиях механические характеристики принципиально разнотипных двигателей описываются идентичными уравнениями. Соответственно в этих границах аналогичны и основные электромеханические свойства двигателей, что создает предпосылки для обобщенного изучения динамики электромеханических систем.
Для описания электромеханических процессов в любом ЭМП как электромеханической системе можно использовать системы уравнений 5.1, 5.2 или 5.3 в сочетании с уравнением динамической жесткости. Для ЭМП с линеаризованной механической характеристикой последнее может быть записано в виде
Tэ dM/dt = b (w 0-w 1) - M, (5.4)
где b = M/(w 0-w 1) - статическая жесткость, Tэ-электромагнитная постоянная времени и w 0 - обобщенное входное воздействие в виде скорости холостого хода обобщенного ЭМП. Из выражения 6.4 можно найти операторное изображение динамической жесткости в виде

и установить, что она описывается передаточной функцией апериодического звена первого порядка.
Естественно, что выражение 5.4 для различных типов двигателей отличаются значениями статической жесткости, электромагнитной постоянной времени и обобщенного входного воздействия. Особенности применяемого двигателя при этом отражаются в конкретном смысле переменных и выражениях параметров.
Например, для двигателя с независимым возбуждением (с постоянным магнитным потоком Ф и якорным управлением коэффициенты обобщенного уравнения определяются следующим образом

Для асинхронного двигателя при линеаризации рабочего участка его характеристики в области s< s кр эти параметры определяются соотношениями

Аналогичные соотношения могут быть найдены и для ДПТ с полюсным управлением и для синхронного двигателя. Однако они будут рассмотрены в соответствующих курсах.
Обобщенная электромеханическая система с механической характеристикой, описываемой линейным дифференциальным уравнением первого порядка является основным объектом изучения теории ЭМС. Она правильно отражает основные закономерности, свойственные реальным нелинейным ЭМС в режимах допустимого отклонения от статического состояния и благодаря простоте обеспечивает возможность обобщенного анализа этих закономерностей методами теории автоматического управления.
Обобщенный управляемый электрический преобразователь
Управляемый преобразователь электрической энергии при построении математических моделей первого приближении можно описать дифференциальным уравнением первого порядка следующим образом
Tпр dw 0/dt= Kпр uу - w 0 ( 5.6)
где uу - входное управляющее воздействие (выходной сигнал регулятора в замкнутой системе; w 0- выходной сигнал преобразователя; Tпр и Kпр - соответственно постоянная времени и статический коэффициент передачи преобразователя. Как видно описание преобразователя соответствует апериодическому звену первого порядка с передаточной функцией
Уравнения состояния и структурная схема обобщенной электромеханической системы.
Объединяя уравнения 5.6, 5.4 и 5.2 в систему и разрешая их относительно соответствующих производных, получим систему уравнений состояния обобщенной ЭПС с двухмассовой механической подсистемой в виде 5.7
dw 0 /dt= -(1/ Tпр ) w 0 +(Kпр / Tпр ) uу (5.7,а)
dM/dt = (b / Tэ) w 0- (b / Tэ)w 1 -(1/ Tэ)M, (5.7,б)
dw 1/dt= - (1/ J1) M12 +(1/ J1) M -(1/ J1) Mc1 (5.7,в)
dM12 /dt =C12 w 1 - C12 w 2 (5.7,г )
dw 2/dt= (1/ J2) M12 - (1/ J2) Mc2 (5.7, д )
Принимая в качестве вектора состояния вектор
Yт =[ w 0 M w 1 M12 w 2 ] , (5.8, а)
в качестве вектора управления - трехмерный вектор
Uт = [ uу Mc1 Mc2 ] (5.8, б)
и в качестве выходных переменных сами переменные состояния , получим

Этой системе уравнений соответствует приведенная ниже ДСС, которая может быть использована в качестве имитационной модели обобщенной энергетической подсистемы ЭМС
Рис. 5.3.
Как видно, обобщенная ЭПС даже при представлении механизма двухмассовой моделью описывается системой дифференциальных уравнений 5-го порядка и доступна точному анализу лишь на ПЭВМ (на цифровой модели). Учитывая трудоемкость теоретического анализа полной системы и громоздкость аналитических выражений, описывающих электромеханические процессы в обобщенной ЭПС, специфику этих процессов мы выясним, проведя далее анализ этих процессов отдельно для механической подсистемы и отдельно для электромеханической подсистемы с одномассовой моделью механизма
ДИНАМИЧЕСКИЕ СВОЙСТВА МЕХАНИЧЕСКОЙ
ПОДСИСТЕМЫ ЭМС
В этом разделе мы рассмотрим механическую часть обособленно от электрической части с целью изучения ее динамических свойств. Входным воздействием этой подсистемы будем считать электромагнитный момент M и задавать его независимой функцией времени. Переходные процессы в подсистеме, обусловленные изменением этого момента, называются механическими переходными процессами.
Уравнения состояния и собственные числа подсистемы
Процессы в указанной подсистеме описываются уравнениями 5.2 а,б,в.
dw 1/dt= - (1/ J1) M12 +(1/ J1) M -(1/ J1) Mc1
dM12 /dt =C12 w 1 - C12 w 2
dw 2/dt= (1/ J2) M12 - (1/ J2) Mc2
Принимая в качестве вектора состояния вектор Yт =[ w 1 M12 w 2 ] , в качестве вектора управления - трехмерный вектор Uт = [ M Mc1 Mc2 ] и качестве выходных переменных сами переменные состояния , получим
Этой системе уравнений соответствует приведенная на рис.6.1 ДСС.
Рис. 6.1.
Определим собственные числа матрицы Aиз характеристического уравнения подсистемы
det(p1 - A)=0
или для данного случая
det (p1-A)= det  =0
=0
Раскрывая определитель, получим

или

Как видно, среди собственных чисел или корней характерис-тического уравнения подсистемы имеется один нулевой (p1=0) и пара чисто мнимых корней вида
p23= ± j 
Вводя понятие резонансной частоты двухмассовой упругой механической системы
W 0= , (6.1)
получим p23=± jW 0 и следовательно,
det(p1 - A)= 
Корни характеристического уравнения свидетельствуют о том, что:
- любой переходный процесс сопровождается незатухающими гармоническими колебаниями с частотой W 0;
- если частота изменения задающего воздействия совпадает с частотой W 0, то в системе возникает резонанс, при котором амплитуды колебаний могут достигать бесконечности;
- структурная схема механической подсистемы должна содержать идеальное интегрирующее и консервативное колебательное звенья.
Передаточные функции и частотные характеристики механической подсистемы
Найдем передаточную матрицу подсистемы по известному правилу.

Поскольку C< Дата добавления: 2017-09-01; просмотров: 4404;
Поиск по сайту
Узнать еще
- А. Аналитические модели.
- А. Модели экономического прогноза на базе производственных функций.
- Автоматизация технологического проектирования. Основные задачи и модели автоматизации технологического проектирования
- Автоматизация ТП. Моделирование техпроцесса.
- АВТОРСКИЕ МОДЕЛИ ПСИХОЛОГИЧЕСКОЙ СЛУЖБЫ, ИЛИ КАК ОБРЕСТИ СВОЕ ЛИЦО
- Адекватность модели и объекта
- Алгоритмы и модели компоновки
- Безынерционные динамические модели

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
