Типы космических аппаратов
Системы управления ракетно-космическими комплексами и космическими летательными аппаратами представляют собой сложные автоматизированные системы, уникальные по своей точности и многообразию выполняемых ими задач.
По своему назначению космические летательные аппараты можно разделить на следующие основные группы.
I. Искусственные спутники Земли и космические корабли:
— простейшие искусственные спутники, к числу которых относится и первый в мире советский искусственный спутник Земли, — это невозвращаемые и нестабилизируемые аппараты. Орбита, на которую выводится такой спутник ракетой-носителем, изменяется с течением времени в основном под действием аэродинамических сил сопротивления атмосферы и гравитационного поля;
— спутники, снабженные той или иной системой ориентации;
— спутники, снабженные системой коррекции орбиты или системой изменения орбиты, способные переходить с одной орбиты на другую по командам бортовых систем или по командам с Земли;
— возвращаемые спутники или спутники с приборным отсеком, возвращаемым на Землю;
— стационарные спутники, имеющие суточный период обращения вокруг Земли;
— пилотируемые космические корабли, снабженные как автоматической, так и ручной системой управления и посадки в заданный район Земли;
— системы спутников или космических кораблей, обеспечивающих автоматическую или ручную стыковку на орбите;
— орбитальные станции.
II. Лунные автоматические станции и космические корабли:
- автоматические станции для исследования околоземного и окололунного пространства, обеспечивающие возможность достижения поверхности Луны;
— автоматические станции для облета вокруг Луны;
— автоматические станции, способные совершать мягкую посадку на Луну;
— искусственные спутники Луны;
— пилотируемые лунные ракетно-космические системы, обеспечивающие возвращение космического корабля на Землю.
III. Межпланетные автоматические станции и космические корабли:
— автоматические станции-зонды для изучения межпланетного и околопланетного космического пространства;
— автоматические станции для изучения планет:
а) позволяющие достигнуть планеты,
б) обеспечивающие мягкую посадку на планету,
в) искусственные спутники планет;
— межпланетные космические корабли для облета вокруг планет с возвращением на Землю;
— межпланетные ракетно-космические системы, предназначенные для посадки на планету, взлета с поверхности планеты и возвращения на Землю.
Рассмотрение важнейших типов и назначения искусственных спутников Земли, автоматических станций и космических кораблей позволяет охарактеризовать основные задачи управления космическими летательными аппаратами.
8.2 Общие сведения о траекториях движения КА
Траекторией движения КА называют функциональную зависимость положения его центра массы от времени в принятой системе координат.
Так как целью полета КА является его сближение с каким-либо космическим телом, имеющим в каждый момент времени хорошо прогнозируемые координаты, то траектория движения КА относится к классу фиксированных траекторий. Различают требуемые (желаемые) и фактические траектории. Кроме того, можно встретить такие термины, как попадающие, номинальные, расчетные траектории. Попадающие (необходимые) – траектории, обеспечивающие решение поставленной задачи. Номинальной является одна из попадающих траекторий, выбранная для полета конкретного КА. Фактической является траектория, по которой происходит действительное движение КА. Расчетная траектория – это траектория, установленная путем расчета на основе данных, полученных в результате контроля фактической траектории.
Траектории движения состоят из чередующихся активных и пассивных участков. На активных участках работает двигатель ЛА. На пассивных участках траектории полет КА происходит под воздействием на него только внешних сил, таких, как силы притяжения Солнца, Земли, Луны и других планет солнечной системы. К активным участкам относятся, во-первых, участки запуска, снижения и посадки КА, во-вторых, участки коррекции, маневрирования, а также сближения и стыковки с другим КА. В первом приближении можно считать, что движение КА на пассивных участках подчиняется кеплеровским законам и, следовательно, траектории его движения могут быть представлены эллиптическими, гиперболическими или параболическими орбитами. Движение КА по орбитам есть основной вид его движения. Траектории БР и ИСЗ мы уже рассматривали в разделе 3 (рисунок 3.13). Повторим рисунок и пояснения к нему.
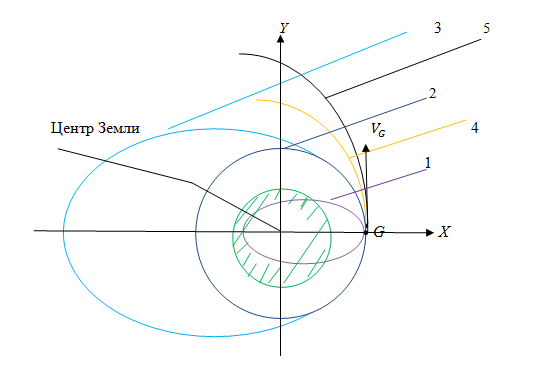
Рисунок 3.13 – Формы траекторий БР, ИСЗ и КА
На рисунке 3.13 показан вариант наведения, когда угол запуска в граничной точке G равен нулю (см. рис. 3.9). При  , т.е. при начальной скорости
, т.е. при начальной скорости 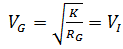 , называемой первой космической скоростью, пассивная траектория представляет собой окружность (орбита 2 на рисунке 3.13). При
, называемой первой космической скоростью, пассивная траектория представляет собой окружность (орбита 2 на рисунке 3.13). При  и
и  баллистический объект имеет эллиптические траектории (траектории 1 и 3 на рисунке). При
баллистический объект имеет эллиптические траектории (траектории 1 и 3 на рисунке). При  , т.е. при второй космической скорости
, т.е. при второй космической скорости  траектория становится параболой (траектория 4). При
траектория становится параболой (траектория 4). При  траектория также не замкнута и соответствует гиперболе (траектория 5 на рисунке 3.13).
траектория также не замкнута и соответствует гиперболе (траектория 5 на рисунке 3.13).
Элементы орбиты.Слово «орбита» по-латыни означает «колея» или «путь». Околоземную орбиту характеризует ряд параметров: наименьшая и наибольшая высота (перигей и апогей, которые также определяют период обращения), наклонение (угол между плоскостью орбиты и плоскостью земного экватора), долгота восходящего узла, задающая, «в какую сторону» (вокруг какой линии в плоскости экватора) наклонена орбита, и аргумент перигея, указывающий, как повернута эллиптическая орбита в своей
|
Рисунок 8.1 – Орбита спутника Земли
собственной плоскости. Гравитационные возмущения со стороны других планет, давление солнечного излучения, несферическая форма Земли, ее магнитное поле и атмосфера приводят к тому, что орбиты спутников могут заметно меняться во времени. Поэтому в ходе эксплуатации спутника регулярно проводятся траекторные измерения, и при необходимости его орбита корректируется.
Именно по кеплеровским траекториям движется космический аппарат под действием одного притягивающего центра. Сложные межпланетные трассы составляются из нескольких стыкующихся друг с другом кеплеровских участков. Например, при полете к Марсу станция уходит от Земли по гиперболической траектории, затем движется
по эллиптической орбите вокруг Солнца и, наконец, по гиперболической орбите приближается к Марсу (конечно, все эти орбиты рассматриваются в системах отсчета, связанных соответственно с Землей, Солнцем и Марсом). Кеплеровские орбиты являются точными аналитическими решениями классической для небесной механики задачи двух тел. Причем решения эти достаточно простые. Для полного описания движения по кеплеровской орбите достаточно задать всего шесть числовых параметров, называемых элементами орбиты. Зная их, легко можно вычислить положение тел на любой момент в прошлом или будущем. Мы не будем в курсе лекций рассматривать аналитические соотношения для орбит (формулы).
По характеру движения КА вблизи исследуемого небесного тела различают орбиты пролета, спутниковые орбиты, орбиты посадки (жесткой и мягкой). По орбите пролета КА движется с гиперболической скоростью относительно исследуемого небесного тела и после сближения с этим телом покидает его окрестность. Коррекция орбиты пролета
реактивными двигателями производится обычно до момента сближения, на участке же сближения коррекция, как правило, не производится, и КА совершает пассивный полет. Спутниковые орбиты КА характеризуются эллиптическими скоростями движения относительно исследуемого небесного тела. Для вывода КА на спутниковую окололунную или околопланетную орбиту необходимо уменьшить скорость КА при сближении с небесным телом до эллиптической, что достигается реактивным торможением КА. Для жесткой посадки КА на поверхность небесного тела характерна большая относительная скорость КА в момент соприкосновения с поверхностью небесного тела. В результате жесткой посадки КА, как правило, разрушается.
Орбиты жесткой посадки являются частными случаями орбит пролета или спутниковых орбит, когда часть орбиты проходит под поверхностью небесного тела и столкновение с этой поверхностью прекращает движение КА. Мягкой посадкой называется такая, при которой относительная скорость KA в момент контакта с поверхностью небесного тела не достигает значений, приводящих к разрушению КА. Мягкая посадка обеспечивается тормозящей реактивной тягой на участке спуска КА или парашютной системой, если небесное тело имеет достаточно плотную атмосферу.
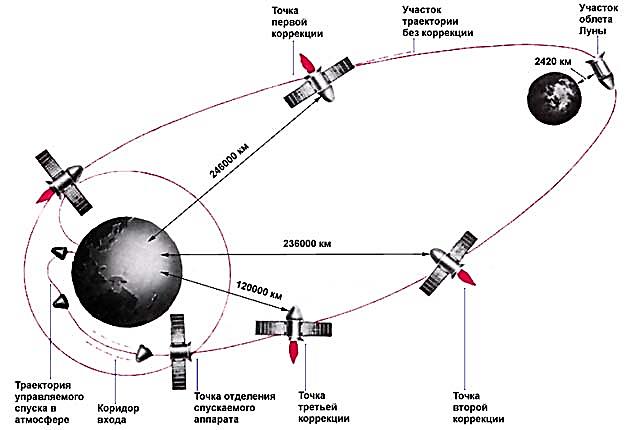
Рисунок 8.2 - Схема полета КА "Зонд-5"
Орбиты КА выбираются и рассчитываются заранее, в соответствии с задачами, которые решаются при запуске КА. При выборе орбит КА большую роль играют вопросы экономного расхода горючего и увеличения полезного веса КА, поэтому стремятся максимальным образом использовать силу тяготения исследуемого тела для изменения траектории в нужном направлении. Так как КА имеют малые размеры и массы, то на их орбиты наряду с силами тяготения заметно влияют сопротивление атмосферы (Земли или планет) и световое давление, которые практически не влияют на движение естественных небесных тел.
В движении искусственных спутников Земли (ИСЗ) наиболее заметны возмущения от сопротивления атмосферы и от сжатия Земли. Под действием сопротивления атмосферы орбита постепенно уменьшается в размерах — происходит уменьшение большой полуоси и эксцентриситета таким образом, что высота перигея орбиты уменьшается во много раз медленнее, чем высота апогея. Следствием уменьшения размеров орбиты является уменьшение периода обращения ИСЗ вокруг Земли и ускорение видимого движения ИСЗ.
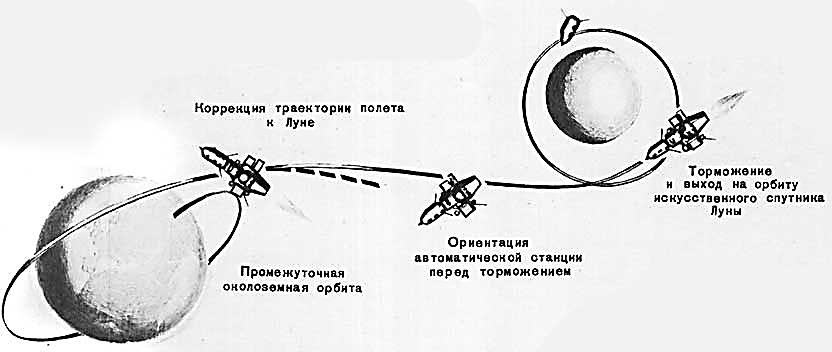
Рисунок 8.3 - Схема полета автоматической станции «Луна-10»
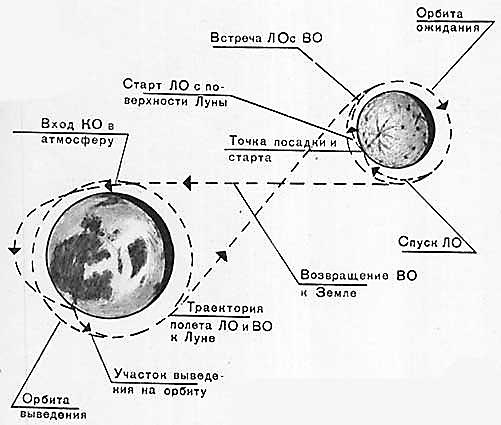
Рисунок 8.4 - Схема полета космического корабля «Аполлон»:
ВО — вспомогательный отсек, КО — командный отсек, ЛО — Лунный отсек
Эти изменения орбиты происходят тем быстрее, чем ближе орбита к поверхности Земли. При высоте круговой орбиты порядка 150—160 км и ниже изменения настолько быстры, что ИСЗ не успевает сделать полного оборота и падает на Землю. Сжатие Земли вызывает два основных эффекта в движении ИСЗ: вращение плоскости орбиты ИСЗ вокруг оси Земли, происходящее в направлении, обратном движению ИСЗ (попятное движение линии узлов орбиты), и вращение самой орбиты в ее плоскости (движение линии апсид[1]). Скорость движения линии узлов равна нулю, если плоскость орбиты перпендикулярна к плоскости земного экватора. Направление движения линии апсид зависит от наклона орбиты к плоскости экватора и совпадает с направлением движения ИСЗ в орбите, если наклон орбиты i < 63°26'; если наклон больше этого значения, то линия апсид движется в направлении, обратном направлению орбитального движения спутника.
Выбранная (расчетная) орбита КА, из-за неизбежных отклонений режима работы двигателей от расчетного при запуске и коррекциях, реализуется не вполне точно. Орбита непрерывно изменяется под воздействием возмущающих сил. Поэтому возникает задача измерения видимого движения КА и определения параметров (элементов) реальной орбиты по результатам этих измерений. Наиболее распространены радиотехнические методы наблюдений, позволяющие определять расстояния до КА и его радиальные скорости. Движение близких к Земле КА (ИСЗ, лунные зонды) измеряется также по результатам наблюдений, позволяющих определять угловые координаты КА (обычно прямое восхождение и склонение или азимут и высоту), а также при помощи лазерных дальномеров. Уточненные значения параметров (элементов) орбиты используются для расчета корректировочных импульсов и для прогноза движения КА при последующих наблюдениях КА.
Использование околоземного пространства. В первом приближении орбиты спутников делятся на низкие (до 2000 километров от Земли), средние (ниже геостационарной орбиты) и высокие. Пилотируемые полеты совершаются не выше 600 километров, поскольку космические корабли не должны входить в окружающие нашу планету радиационные пояса. Энергичные протоны внутреннего радиационного пояса создают опасность для жизни космонавтов. Максимальная интенсивность облучения достигается на высоте около 3000 километров, которую избегают все космические аппараты. Внешний электронный пояс не так опасен. Его максимум лежит где-то между зонами навигационных и геостационарных спутников.
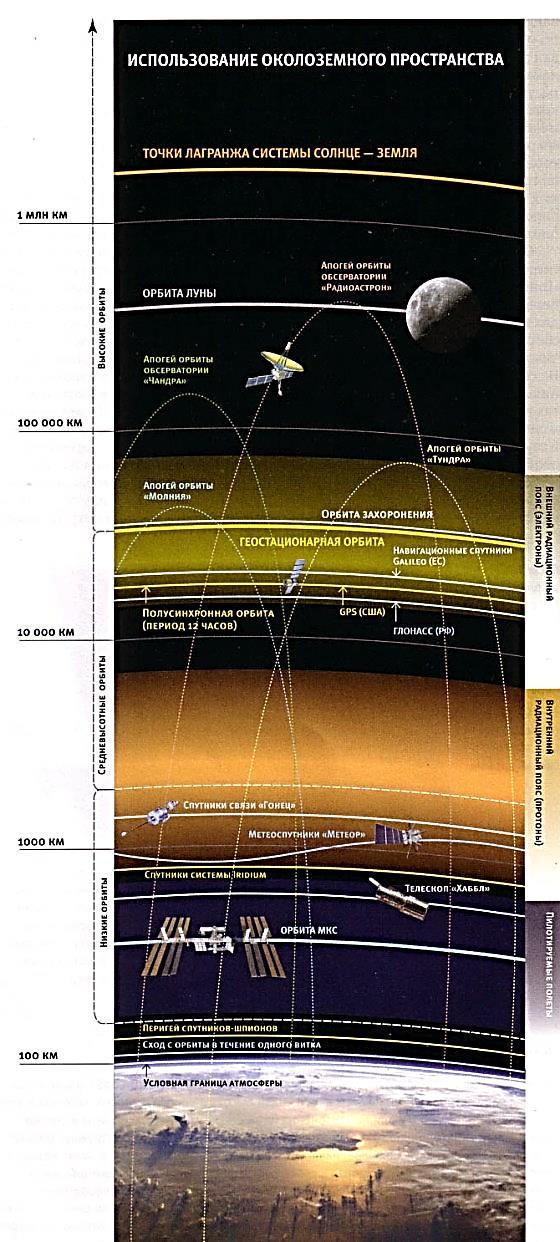
Рисунок 8.5 –
Пространство
вокруг Земли
Еще выше обычно поднимаются спутники, работающие на сильно вытянутых эллиптических орбитах. Таковы, например, рентгеновская обсерватория «Чандра» (США), которая во избежание помех наблюдает вдали от радиационных поясов, и будущая российская обсерватория «Радиоастрон», данные которой тем точнее, чем больше расстояние от работающих с ней в паре земных радиотелескопов. Самые высокие околоземные орбиты, которые в равной мере можно считать околосолнечными, лежат на высоте 1,5 миллиона километров вблизи так называемых точек Лагранжа.
Системы координат
При траекторных измерениях используется целый ряд прямоугольных и полярных сферических систем координат. Для удобства обработки результатов измерения на различных участках траектории отсчеты ведутся в разных координатных системах.
Различают гелеоцентрическую, геоцентрическую, планетоцентрическую, селеноцентрическую и др. системы координат.
На рисунках 8.6 и 8.7 изображены системы координат, используемые в ракетно-космической технике околоземного пространства. В качестве опорной системы координат здесь принята абсолютная геоцентрическая экваториальная инерциальная система координат  , начало координат которой совпадает с центром земли. Ось
, начало координат которой совпадает с центром земли. Ось  направлена на северный полюс N, а ось
направлена на северный полюс N, а ось  направлена к точке весеннего равноденствия
направлена к точке весеннего равноденствия  в отличие от относительной геоцентрической (географической) системы координат
в отличие от относительной геоцентрической (географической) системы координат  , где плоскость
, где плоскость  совпадает с гринвичским меридианом (рисунок 4.11)[2], а плоскости
совпадает с гринвичским меридианом (рисунок 4.11)[2], а плоскости  и
и  лежат в плоскости экватора Земли.
лежат в плоскости экватора Земли.
При траекторных измерениях положение КА регистрируется в горизонтальной измерительной топоцентрической системе координат, центр которой совпадает с местом расположения антенны измерительного пункта (ИП), вертикальная ось y направлена вдоль местной вертикали, а ось x – по касательной к местному меридиану, ось z выбирается так, чтобы система координат была правой (рисунок не показан).
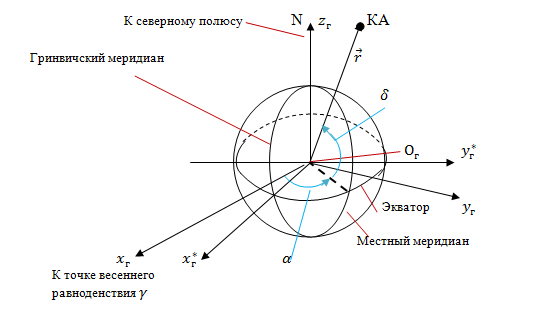
Рисунок 8.6 – Геоцентрическая экваториальная система координат
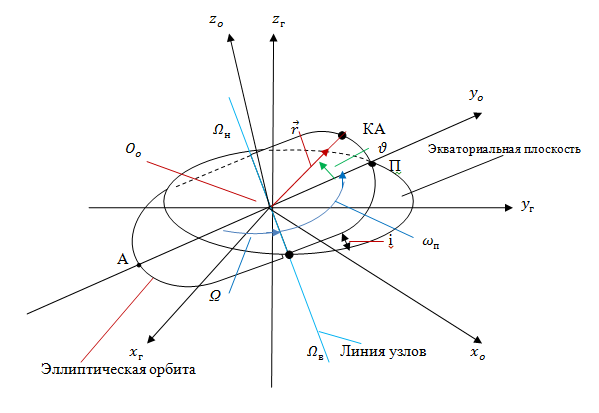
Рисунок 8.7 – Геоцентрическая орбитальная система координат
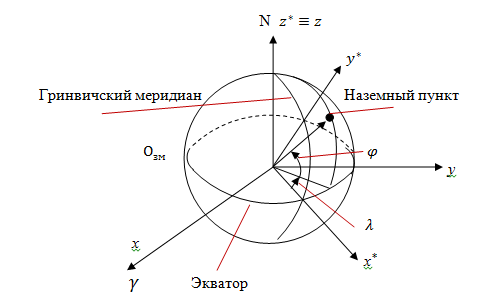
Рисунок 8.8 – Геодезическая система координат
Координаты наземных ИП обычно задаются в жестко связанной с Землей геодезической системе координат  (рисунок 8.8). Начало геодезической системы – центр Земли, опорная плоскость – плоскость экватора, ось
(рисунок 8.8). Начало геодезической системы – центр Земли, опорная плоскость – плоскость экватора, ось  проходит через северный полюс, ось x* образуется пересечением плоскости гринвичского меридиана с плоскостью экватора, ось
проходит через северный полюс, ось x* образуется пересечением плоскости гринвичского меридиана с плоскостью экватора, ось  направлена так, чтобы система координат была правой. Геодезической декартовой системе координат соответствует сферическая система, в которой положение точки определяется модулем радиус-вектора
направлена так, чтобы система координат была правой. Геодезической декартовой системе координат соответствует сферическая система, в которой положение точки определяется модулем радиус-вектора  , широтой
, широтой  и долготой λ. Для перехода от декартовых к сферическим геодезическим координатам нужно воспользоваться соотношениями
и долготой λ. Для перехода от декартовых к сферическим геодезическим координатам нужно воспользоваться соотношениями
 ,
,
 , (8.1)
, (8.1)
 ,
,
заменяя склонение  широтой , а прямое восхождение
широтой , а прямое восхождение  долготой λ. Соотношения (8.1) связывают также геоцентрическую экваториальную систему и сферическую экваториальную систему, в которой положение точки определяется радиус-вектором и углами и (рисунок 8.6).
долготой λ. Соотношения (8.1) связывают также геоцентрическую экваториальную систему и сферическую экваториальную систему, в которой положение точки определяется радиус-вектором и углами и (рисунок 8.6).
Описание орбитального движения удобно вести в орбитальной неподвижной системе координат  , в которой центр координат совпадает с центром поля тяготения, в котором происходит движение (для геоцентрической системы точка
, в которой центр координат совпадает с центром поля тяготения, в котором происходит движение (для геоцентрической системы точка  совпадает, очевидно, с
совпадает, очевидно, с  ), и ось
), и ось  - с направлением линии апсид, как это показано на рисунках 8.7 и 8.9. На рисунке 8.7 показаны также три элемента ориентации орбиты для случая замкнутой эллиптической орбиты. Это Ω – долгота восходящего узла, а именно, угол, расположенный в экваториальной плоскости и отсчитываемый от направления на точку весеннего равноденствия до линии узлов
- с направлением линии апсид, как это показано на рисунках 8.7 и 8.9. На рисунке 8.7 показаны также три элемента ориентации орбиты для случая замкнутой эллиптической орбиты. Это Ω – долгота восходящего узла, а именно, угол, расположенный в экваториальной плоскости и отсчитываемый от направления на точку весеннего равноденствия до линии узлов  , т.е. линии пересечения плоскости орбиты с экваториальной плоскостью (восходящим узлом орбиты
, т.е. линии пересечения плоскости орбиты с экваториальной плоскостью (восходящим узлом орбиты  называют точку, в которой движущееся тело переходит из южного полушария в северное); наклонение орбиты i – двухгранный угол между плоскостью орбиты и плоскостью экватора; аргумент перицентра
называют точку, в которой движущееся тело переходит из южного полушария в северное); наклонение орбиты i – двухгранный угол между плоскостью орбиты и плоскостью экватора; аргумент перицентра  - угловое расстояние перицентра П от восходящего узла, отсчитываемое от линии узлов в плоскости орбиты в направлении движения КА.
- угловое расстояние перицентра П от восходящего узла, отсчитываемое от линии узлов в плоскости орбиты в направлении движения КА.
Все точки земной поверхности, оставаясь неподвижными в геодезической системе, перемещаются в геоцентрической системе координат с запада на восток соответственно суточному вращению Земли вокруг оси  с угловой скоростью
с угловой скоростью  . Линейная скорость их движения составляет величину
. Линейная скорость их движения составляет величину
 , м/сек, (8.2)
, м/сек, (8.2)
где  - расстояние от центра Земли до рассматриваемой точки, приближенно равное 6371 км; - широта рассматриваемой точки.
- расстояние от центра Земли до рассматриваемой точки, приближенно равное 6371 км; - широта рассматриваемой точки.
В заключение рассмотрим более подробно орбитальное движение ЛА (рисунок 8.9). Элементами, определяющими размер и форму орбиты, являются: 1) большая полуось  эллипса орбиты, равная половине длины линии апсид АП, т.е. расстояние от апоцентра (для ИСЗ апогея) до перицентра (для ИСЗ перигея), 2) эксцентриситет орбиты
эллипса орбиты, равная половине длины линии апсид АП, т.е. расстояние от апоцентра (для ИСЗ апогея) до перицентра (для ИСЗ перигея), 2) эксцентриситет орбиты  . П- самая близкая к центру притягивающего тела точка, А – самая удаленная точка. В соответствии с обозначениями рисунка 8.9:
. П- самая близкая к центру притягивающего тела точка, А – самая удаленная точка. В соответствии с обозначениями рисунка 8.9:  , эксцентриситет орбиты
, эксцентриситет орбиты  r – радиус-вектор текущего положения КА на орбите
r – радиус-вектор текущего положения КА на орбите  ,
,  - угол истинной аномалии в текущий момент, Е – угол эксцентрической аномалии.
- угол истинной аномалии в текущий момент, Е – угол эксцентрической аномалии.  – фокальный параметр.
– фокальный параметр.
Кроме того, для однозначного определения положения КА указывают момент времени τ прохождения КА через точку перицентра.
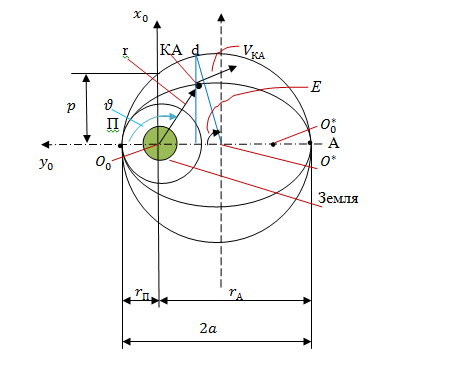
Рисунок 8.9 – Траектории КА
Параметр определяет размеры орбиты, а эксцентриситет указывает на форму орбиты. При  орбита представляет собой замкнутую кривую: круг (
орбита представляет собой замкнутую кривую: круг (  ) либо эллипс (
) либо эллипс (  ). При
). При  - разомкнутая кривая: парабола (
- разомкнутая кривая: парабола (  ) или гипербола (
) или гипербола (  ).
).
Чтобы описать движение КА в плоскости орбиты, используют углы и Е, который отсчитывается от линии апсид в направлении движения КА до радиуса  условной круговой орбиты, построенной на линии апсид, как на диаметре, и проходящий через точку пересечения круговой орбиты с перпендикуляром к линии АП, проведенной через точку мгновенного положения КА.
условной круговой орбиты, построенной на линии апсид, как на диаметре, и проходящий через точку пересечения круговой орбиты с перпендикуляром к линии АП, проведенной через точку мгновенного положения КА.
Для описания движения КА по орбите используют также вспомогательный параметр, называемый средней аномалией  , понимая под этим угол, образуемый радиус-вектором
, понимая под этим угол, образуемый радиус-вектором  с положительным направление оси при движении КА по условно круговой орбите со скоростью
с положительным направление оси при движении КА по условно круговой орбите со скоростью  , при которой период обращения КА по этой орбите равен периоду обращения КА
, при которой период обращения КА по этой орбите равен периоду обращения КА  по эллиптической орбите. Так как движение КА по условно круговой орбите предполагается равномерным, то
по эллиптической орбите. Так как движение КА по условно круговой орбите предполагается равномерным, то
 ,
,
где  . Здесь k – гравитационный параметр поля тяготения, в котором проходит движение КА.
. Здесь k – гравитационный параметр поля тяготения, в котором проходит движение КА.
Средняя и эксцентрическая аномалии связаны соотношением
 .
.
Средняя аномалия часто используется как элемент орбиты вместо момента времени τ. На рисунке 8.9 показана также возможная круговая орбита с центром в центре Земли.
Угол наклонения i определяет, является ли орбита движения экваториальной (  ), полярной (
), полярной (  ) или наклонной (0
) или наклонной (0  ). Выбор орбиты КА с теми или иными значениями и
). Выбор орбиты КА с теми или иными значениями и  определяется его назначением и условиями запуска. В таблице 8.1 приведены сведения о некоторых использованиях орбит КА различного назначения.
определяется его назначением и условиями запуска. В таблице 8.1 приведены сведения о некоторых использованиях орбит КА различного назначения.
Таблица 8.1 - Орбиты различного назначения
| Круговая орбита
( )
| Эллиптическая орбита
( )
| Гиперболическая орбита
( )
|
| Метеорологические ИСЗ | Связные ИСЗ | Траектории движения межпланетных КА при их полете в поле тяготения планет или Луны |
| Навигационные ИСЗ | Промежуточные орбиты КА | |
Связные ИСЗ на стационарной орбите (  период обращения 24 час) период обращения 24 час)
| Траектории движения межпланетных КА |
Изображения некоторых орбит уже были приведены в подразделе 8.2.
Дата добавления: 2017-09-01; просмотров: 7412;
Поиск по сайту
Узнать еще
- I. Политический режим: понятие, сущность и основные типы.
- I. Понятие и типы политических партий.
- II. Типы политических лидеров.
- VI. ЩЕЛЕВЫЕ И СПЕЦИАЛЬНЫЕ ТИПЫ АНТЕНН
- А) Типы и конструктивные особенности баз.
- А. Клинические типы.
- Адаптивные типы рептилий. Питание и ядовитый аппарат. Размножение (яйцекладущие, яйцеживородящие, живородящие формы).
- Адаптивные экологические типы человека

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
