Общие сведения об организации космических радиотехнических комплексов
Космическими радиотехническими комплексами (КТРК) принято называть совокупность радиотехнических средств, контролирующих движение и состояние КА; обеспечивающих обмен информацией КА с Землей и с другими КА; передающих на борт команды управления.
Опыт эксплуатации автоматических космических аппаратов свидетельствует о том, что эффективное управление их полетом наилучшим образом обеспечивается системой из нескольких основных звеньев, каждое из которых способно выполнять определенные функции. К таким звеньям относят:
- наземный комплекс управления (или центр управления полетом), средства моделирования полета и обеспечение обмена информацией между наземным комплексом и аппаратом;
- бортовую автоматику (или бортовой комплекс автоматического управления), включающую в себя «интеллектуальную» часть в виде бортовой вычислительной системы, исполнительную – в виде приборов, преобразующих выходные сигналы бортовой вычислительной системы в управляющие воздействия, и сенсорную часть в виде датчиков определения движения.
Итак, в состав космического радиотехнического комплекса (КТРК) входят следующие системы, включающие в себя бортовые и наземные радиотехнические средства.
1. Космические радионавигационные и радиолокационные системы траекторных измерений.
2. Системы передачи информации, включающие в себя, во-первых, радиотелеметрические системы, передающие с борта КА научную информацию, сведения о жизнедеятельности космонавтов и результаты контроля состояния агрегатов и систем КА; во-вторых, телевизионную, телефонную и телеграфные системы связи.
3. Радиотехнические системы управления КА, которые можно подразделить на две группы.
Первая – обеспечивает вывод КА на заданную орбиту и маневрирование на ней, а также осуществляет коррекцию траектории движения КА.
Вторая – обеспечивает посадку КА на какие-либо космические тела или на Землю. Особенностью систем этой группы является то, что они должны осуществлять управление положением КА с высокой точностью на очень малых расстояниях от места посадки.
4. Радиотехнические системы, обеспечивающие синхронность работы всех наземных и бортовых средств КРТК. Средства этой группы носят название системы единого времени (СЕВ) и состоят из периодически контролируемых высокостабильных эталонных источников частоты.
В зависимости от назначения КРТК могут быть универсальными и специализированными. Универсальный КРТК – это командно-измерительный комплекс (КИК), располагающий радиотехническими средствами определения траектории движения КА, приема от него различной научной и телеметрической информации и передачи на КА команд управления. Поскольку информация должна передаваться на большие расстояния, то в линиях передачи данных используются специальные методы кодирования, повышающие помехоустойчивость приема.
Для обслуживания КА, выполняющих ограниченные функции, например, сбор метеорологической информации (метеорологические ИСЗ), ретрансляцию сигналов (связные ИСЗ), привлекаются дополнительные радиотехнические средства, образующие специализированные КРТК. Эти комплексы работают в тесном взаимодействии с универсальными, получая от них всю информацию о движении соответствующего КА и состоянии бортовой аппаратуры КА.
КИК включает в себя комплекс бортовых и наземных радиотехнических средств (рисунок 8.11).
Наземные измерительные пункты связаны между собой линиями связи и передачи данных.
Есть несколько причин, которые не дают возможности использовать для определения параметров движения КА и обеспечения обмена информацией с ним только одного ИП.

Рисунок 8.11- Командно-измерительный комплекс
На рисунке приняты сокращения ИП - измерительный пункт, ЛПД – линии связи и передачи данных, ЦПУ – центральный пункт управления,
АОРИ – аппаратура отображения и регистрации информации,
КВЦ – координационно - вычислительный пункт, ЦП СЕВ – центральный пункт системы единого времени, СППИ – система предварительного преобразования информации.
Во-первых, это ограничение радиовидимости. Например, на высотах не более 1000 км продолжительность пребывания КА в зоне видимости одного КП составляет 7…15 мин. Время видимости определяется углом  .
.  = 5÷10 град из-за особенностей распространения радиоволн. На рисунке не учтена скорость вращения Земли и скорость КА.
= 5÷10 град из-за особенностей распространения радиоволн. На рисунке не учтена скорость вращения Земли и скорость КА.
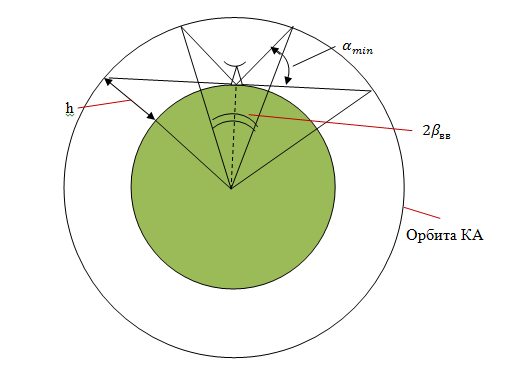
Рисунок 8.12 – К пояснению понятия радиовидимости
Во-вторых, точность измерения элементов орбиты одним ИП сравнительно низкая. Необходимо не менее трех – шести достаточно удаленных друг от друга ИП. Среднее число станций слежения 20…30, хотя иногда их число доходит до 80 и более.
В задачу КВЦ входит: 1) согласование работы всех ИП; 2) обработка всей информации о движении большого количества КА и вычисление элементов их орбит; 3) прогнозирование траекторий КА и определение моментов их появления в зонах видимости отдельных ИП, расчет программ поиска КА в начальный момент работы ИП; 4) расчет моментов коррекции траекторий и всей программы коррекции; 5) расчет траектории спуска и посадки.
На рисунке 8.13 для примера показана схема комплекса метеорологической системы. На рисунке: 1 — пункт управления; 2 — наземная аппаратура командной радиолинии; 3 — пункт автоматической обработки телеметрической информации; 4 — командная радиолиния; 5 — канал поступления телеметрическая информация; 6 — радиолиния метеорологической информации; 7— аппаратура преобразования метеорологической информации; 8 — пункты приема метеорологической информации; 9 — блок обработки телевизионной информации; 10 — блок обработки актинометрической[3] информации; 11 — блок обработки инфракрасной информации; 12 — Гидрометеоцентр СССР. Осуществляется выпуск прогнозов: 13 — для авиации; 14 — для сельского хозяйства; 15 — для кораблей морского флота; 16 — для населения об опасных явлениях погоды; 17 — о состоянии ледяного покрова.
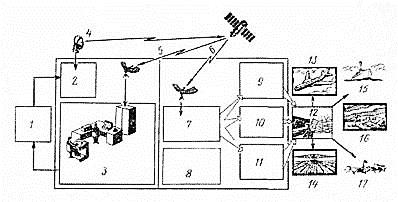
Рисунок 8.13 - Структурная схема космической метеорологической системы
Еще пример - Единый государственный наземный автоматизированный комплекс управления,предназначенный для ведения контроля за автоматическими космическими аппаратами, пилотируемыми космическими кораблями и орбитальными станциями.
ЕГНАКУ решает задачи управления движением космических аппаратов различного назначения на всех участках полета и спуска, мониторинга всех его устройств и систем, приема научной, метеорологической, связной, телевизионной, навигационной, топогеодезической и другой информации, радиосвязи с экипажами пилотируемых КА, измерений при пускахракет-носителей.
ЕГНАКУ представляет собой совокупность технических средств и сооружений, размещенных в Главном испытательном центре испытаний и управления космическими аппаратами Министерства обороны и на наземных отдельных командно-измерительных комплексах. Эти средства объединены линиями информационной и технологической связи в единый автоматизированный комплекс.

Рисунок 8.14 – Работа в Центральном управляющем пункте
Средства из состава ЕГНАКУ, предназначенные для управления космическим аппаратом или группировкой однотипных КА, образуют наземные комплексы управления, которые, совместно с бортовыми комплексами управления, составляют автоматизированные системы управления соответствующими КА.
Наземные комплексы управления различают по функциональному предназначению:
· НКУ КА геодезии;
· НКУ КА связи и ретрансляции;
· НКУ КА наблюдения;
· НКУ метеорологическими средствами,
· НКУ топогеодезическими и юстировочными КА и др.
Сегодня Единый государственный наземный автоматизированный комплекс управления способен обеспечить управление 180 космическими аппаратами и информационное обеспечение запусков ракет-носителей и разгонных блоков. Ежедневно средства наземных автоматизированных комплексов управления космическими аппаратами обеспечивают проведение более 500 сеансов управления различного назначения. 
Система управления полетом космического аппарата в совокупности с его бортовыми комплексами, агрегатами, механизмами и элементами конструкции, являющимися объектами управления, образует контур управления.
Управление КА
При полете КА решаются следующие задачи управления:
1) управление движением центра масс;
2) управление угловыми движениями вокруг центра масс;
3) управление ориентацией при спуске;
4) управление стыковкой двух космических аппаратов на орбите;
5) управление работой бортовой аппаратуры;
6) управление действиями экипажа.
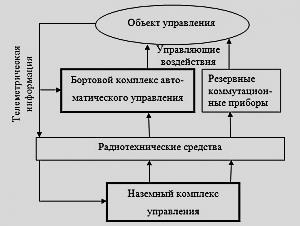
Рисунок 8.15 - Простейшая схема системы управления космическим аппаратом
Во всех случаях управление может выполняться как с помощью неавтономных систем, например, с наземного пункта, так и с помощью автономных систем.
В случае управления полетом группы аппаратов в контуре управления имеется несколько объектов управления и бортовых комплексов управления, которые кроме управления спутником, на котором они установлены, способны формировать управляющие команды для остальных спутников в группе.
Основные компоненты процесса управления полетом любого типа космических аппаратов осуществляются в результате выполнения системой управления полетом ряда функций, состав и особенности реализации которых для любой конфигурации контура управления и сформированного плана полета представлены ниже.
1. Коррекция номинального плана полета и оперативное планирование.
2. Навигационные измерения и баллистические расчеты.
3. Выдача на бортовые исполнительные системы аппарата управляющих воздействий. Управляющие воздействия можно классифицировать как «срочные» (для оперативной реализации решения), «несрочные» (исполняемые в любой удобный момент в течение определенного времени), с точно заданным временем (например, команды включения двигателя при маневре, запуска программы возвращения на Землю и т.д.) и последовательная выдача на бортовые системы управляющих воздействий в типовых полетных операциях.
4. Контроль параметров состояния аппарата.
5. Обнаружение и идентификация нештатных ситуаций в процессе контроля состояния.
6. Оценка полета, выработка и принятие решений по дальнейшему его выполнению.
7. Реагирование на обнаруженные нештатные ситуации.
Осуществление указанных функций управления космическим полетом возлагается на наземный комплекс управления и бортовой комплекс автоматического управления аппаратом (или на бортовые комплексы управления в случае группового полета).
В ходе космических полетов в системе управления реализуется ряд процессов, решающих задачу формирования информации, необходимой для управления. Указанные процессы характеризуются следующими видами информационного обеспечения:
- баллистико-навигационное обеспечение;
- командно-программное обеспечение;
- информационно-телеметрическое обеспечение;
- контрольно-диагностическое обеспечение;
- методическое обеспечение нестандартных операций;
- информационное обеспечение выполнения целевой программы.
Характеристики потоков информации, их структура и объем зависят от принятого метода управления, который в числе прочего определяется конкретным распределением функций между бортовым комплексом автоматического управления и наземным комплексом управления. Кроме того, они зависят от перечня исходных данных, требуемых для автономного решения задач управления бортового комплекса, от состава параметров, необходимых для реализации алгоритмов, регламентирующих работу бортовых систем и аппаратуры космического аппарата.
Баллистико-навигационное обеспечение использует следующую информацию:
- баллистическую схему полета аппарата, разрабатываемую исходя из условия надежного достижения цели полета с наименьшими затратами ресурсов;
- параметры требуемой орбиты аппарата, определяемые принятой баллистической схемой полета и текущими условиями;
- параметры фактической орбиты аппарата, рассчитываемые оперативно по данным измерений текущих навигационных параметров и их прогнозируемые значения на требуемый момент времени;
- текущее состояние аппарата относительно центра масс, получаемое с помощью бортовых средств определения ориентации;
- параметры маневров, обеспечивающих нужную орбиту;
- установочные данные для настройки приборов системы управления движением;
- данные для наземной и автоматической систем навигации;
- баллистическую информацию, необходимую для оперативного планирования полета (периоды радиовидимости, освещенность Солнцем участков траектории, расстояние между аппаратом и Землей и задержку прохождения радиосигнала для межпланетных станций);
- баллистические данные и данные об ориентации аппарата, необходимые для научных исследований и экспериментов;
- целеуказания для наведения антенн наземных станций слежения и антенн радиосистемы аппарата на наземные станции и спутники-ретрансляторы.
Реализация баллистико-навигационного обеспечения требует получения следующей информации:
- навигационных параметров, получаемых наземным комплексом управления с помощью собственных радиосредств, или вычислительной системой аппарата посредством бортовой автоматической либо ручной аппаратуры навигационных измерений;
- телеметрической информации, содержащей данные для уточнения параметров, закладываемых в проводимые баллистические;
- данные об угловом положении, определяемые с помощью датчиков определения ориентации.
Баллистико-навигационное обеспечение выполняется наземным комплексом управления, а также автономно бортовыми вычислительными средствами аппарата. Для лунных и межпланетных станций возможность полностью автономной реализации баллистико-навигационного обеспечения является обязательным условием обеспечения безопасности полета при длительном отсутствии связи с наземным комплексом управления.
Командно-программное обеспечение формируется наземным комплексом управления. Оно заключается в трансформации решений по управлению полетом в управляющие воздействия, выдаваемые от наземного комплекса управления на бортовые системы аппарата и бортовой комплекс автоматического управления. При автономном управлении полетом без участия наземного комплекса управления эта задача решается бортовой вычислительной машиной, которая вырабатывает управляющие команды и в определенное время выдает их на бортовые системы.
Информационно-телеметрическое обеспечение предназначено для формирования телеметрической информации, поступающей от систем КА в наземный комплекс управления и бортовую вычислительную машину, и её преобразования к виду, необходимому для решения задач управления полетом.
Телеметрическая информация поступает от датчиков в виде измерений физических величин. Далее измерения переводятся в параметры состояния аппарата. На этапе обработки телеметрической информации фильтруют недостоверные значения параметров состояния аппарата, выделяют существенные, привязывают их ко времени. Телеметрическая информация может обрабатываться автономно на борту, передаваться на наземный комплекс управления для обработки или для контроля состояния аппарата. Вся совокупность передающих, преобразующих и коммутационных устройств составляет телеметрическую (или радиотелеметрическую) систему космического аппарата.
Цель контрольно-диагностического обеспечения
– автоматизированный мониторинг состояния аппарата и диагностика причин возникновения аномальных ситуаций для информирования звена, ответственного за общую оценку хода полета и принятие решения по её результатам. Контроль и диагностика заключаются в обработке и анализе информации, получаемой от служб телеметрического, баллистико-навигационного и командно-программного обеспечений.
Методическое обеспечение нестандартных полетных операций необходимо при планировании и проведении операций, разрабатываемых в ходе полета. Процесс предполагает разработку наземными специалистами технологий выполнения таких операций и отработку на моделирующих или на натурных стендах.
Информационное обеспечение выполнения целевой программы обеспечивается поставщиками целевых работ, а также персоналом оперативной группы управления, ответственным за целевую программу полета данного аппарата.
Каждый из указанных видов информационного обеспечения реализуется определенным элементом системы управления полетом. В составе наземного комплекса управления эти элементы представлены отдельными группами наземного персонала с необходимыми программно-техническими средствами, на борту аппарата – в виде соответствующего программно-технического обеспечения.
Требования по каждому типу информационного обеспечения сильно зависят от задач управления. Одним из главных факторов, оказывающих влияние на информационное обеспечение, является динамика управляемого движения аппарата или группы аппаратов. Во многом от требований к управлению возникают требования к баллистико-навигационному обеспечению, командно-измерительному и информационно-телеметрическому обеспечению.
Информационные требования для осуществления управления конкретным спутником или группировкой спутников ставятся исходя из использования конкретных алгоритмов управления, для успешного функционирования которых необходим некоторый пакет информации, формирующийся либо на борту, либо в наземном комплексе управления, причем часть информации, как правило, должна поступать с некоторой частотой, а часть должна быть задана единовременно. От качества информации (точность, полнота и т.д.), частоты получения информации, частоты управляющих воздействий, точности исполнения управляющих воздействий зависит качество управления космическим аппаратом.
При управлении движением центра масс КА основное значение имеет неавтономное корректирующее радиоуправление. Такое управление осуществляется как командное радиоуправление I-типа (КРУ-I). В последнее время для управления космическими кораблями все большее применение получает также автономное корректирующее радиоуправление. При стыковке КА используется самонаведение и наведение «на себя» (КРУ-III).
Отличительной чертой корректирующего управления является разнесение во времени процессов контроля траектории КА и изменения ее параметров. При этом контроль производится в течение длительного времени орбитального полета, а коррекция траектории за малое время движения на активном участке. В тех случаях, когда в течение достаточно длительного времени происходят быстрые непредсказуемые изменения действующих на КА сил, вместо корректирующего, целесообразнее использовать следящее радиоуправление. В основном оно применяется на заключительных (терминальных) участках, например, при мягкой посадке на поверхность или при стыковке КА.
При корректирующем командном радиоуправлении с наземного пункта измерение параметров движения КА может осуществляться не только на земле, но и на борту КА, что соответствует командному управлению КРУ-II. В этом случае результаты измерений должны передаваться на Землю. При удалении от Земли и приближении к цели точность измерений с КП падает, а точность измерений, проведенных на борту, возрастает.
Функциональная схема корректирующего радиоуправления с наземного командного пункта приведена на рисунке 8.16.
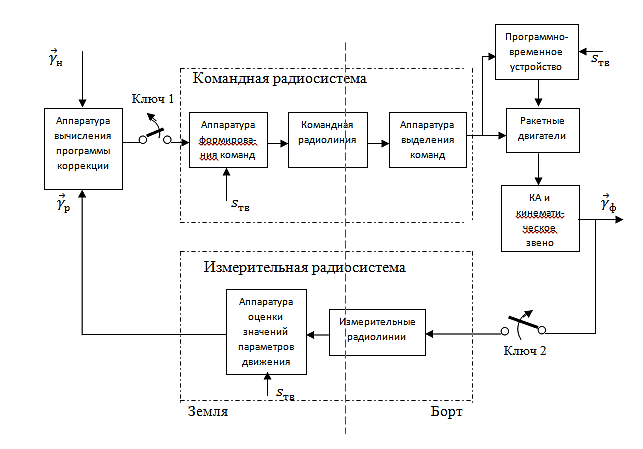 Фактические параметры движения центра масс КА характеризуются шестимерным вектором
Фактические параметры движения центра масс КА характеризуются шестимерным вектором  . С помощью измерительных радиосистем производится оценка значений этих параметров, в результате которой находится расчетный шестимерный вектор
. С помощью измерительных радиосистем производится оценка значений этих параметров, в результате которой находится расчетный шестимерный вектор  . В ЦВМ по найденному
. В ЦВМ по найденному  вычисляется расчетная траектория движения КА и находится ее отличие от номинальной траектории, определяемой совокупностью параметров
вычисляется расчетная траектория движения КА и находится ее отличие от номинальной траектории, определяемой совокупностью параметров  .
.
Рисунок 8.16 – Функциональная схема корректирующей системы управления с КП
Анализируя отклонения расчетной траектории от номинальной, оператор принимает решение о целесообразности проведения коррекции движения КА, определяет подходящую попадающую траекторию и с помощью ЦВМ вычисляет программу коррекции.
Ключи на схеме показывают, что работа системы осуществляется сеансами. Синхронизация системы обеспечивается сигналами точного времени  .
.
Для управления движением центра масс космических летательных аппаратов служат корректирующие и тормозные двигательные установки. Включение тормозных и корректирующих двигательных установок производится только после того, как космический летательный аппарат будет ориентирован соответствующим образом в пространстве и обеспечена его стабилизация с тем, чтобы вектор тяги двигательной установки был повернут в нужном направлении.
Для того чтобы осуществить требуемый корректирующий импульс, необходимо направить продольную ось летательного аппарата под строго определенным углом к его траектории и к плоскости орбиты.
Корректирующие двигательные установки используются также для торможения при запуске искусственных спутников Луны или планеты. Такая двигательная установка позволяет перевести космический летательный аппарат с траектории пролета мимо планеты на орбиту искусственного спутника планеты.
На всех спускаемых с орбиты космических летательных аппаратах устанавливается тормозная двигательная установка, которая обеспечивает переход с орбиты искусственного спутника космического тела на траекторию спуска, сообщая аппарату необходимый тормозной импульс, снижающий скорость его полета.
Система ориентации совмещает систему координат, связанную с корпусом КА, с выбранными опорными направлениями, соответствующими базовой опорной системе координат. Для совмещения в пространстве трехосной координатной системы должны использоваться два опорных направления. В тех случаях, когда оказывается достаточным ориентировать одну ось КА, нужно иметь всего одно опорное направление, скажем, местную вертикаль при орбитальных полетах ИСЗ.
При управлении баллистическими ракетами, как и при управлении снарядами, системы ориентации и стабилизации объединены и ориентация производится перед стартом, например, установкой осей гироскопической системы координат в соответствующее положение. При управлении ИСЗ КА дальнего космоса, находящимися в полете существенно большее время, ориентация осуществляется неоднократно. Система ориентации КА используется также для наведения бортовых антенн на наземные пункты или другие объекты и панелей солнечных батарей - на Солнце.
Чаще всего ориентация космического летательного аппарата решается с помощью системы астроориентации. Система астроориентации имеет электронно-оптические датчики, гироскопические измерители скорости вращения аппарата, усилительно-преобразовательную аппаратуру и исполнительные механизмы, создающие вращающий момент. Положение космического летательного аппарата в пространстве обычно фиксируется относительно астрономических ориентиров, например Солнца, какой-либо звезды или Земли. Разворот аппаратов в заданном направлении производится чаще всего с помощью реактивных микродвигателей. При этом система управления включает микродвигатели до тех пор, пока летательный аппарат не займет требуемое положение в пространстве. Затем система ориентации поддерживает оси летательного аппарата в строго заданном направлении.
Система ориентации летательного аппарата обычно имеет три режима работы: первый режим — это процесс поиска астроориентиров, на которые рассчитана система ориентации, второй режим — разворот космического летательного аппарата в заданное положение после того, как астроориентиры попадут в «поле зрения» электронно-оптических датчиков ориентации. Третий режим работы — режим удержания ориентации летательного аппарата относительно заданного направления. Для системы стабилизации возникают наиболее трудные условия в период работы корректирующих или тормозных двигательных установок, когда система стабилизации должна компенсировать возмущения, возникающие при работе двигателей, и обеспечить высокую точность стабилизации.
Практически ориентация летательного аппарата может производиться двумя принципиально различными методами: пассивным и активным. Каждый из них имеет свои достоинства и недостатки, которые учитывают при выборе метода.
Пассивной ориентацией принято называть ориентацию летательного аппарата, осуществляемую за счет внешних моментов, создаваемых в результате взаимодействия с окружающей средой. Основными видами пассивной ориентации являются: гравитационная ориентация, аэродинамическая ориентация и др.
К числу методов стабилизации, которые не требуют непрерывного подвода энергии, относится также метод стабилизации космических летательных аппаратов вращением вокруг одной из осей. Хорошо известно, что твердое тело, которому сообщено вращательное движение вокруг одной из его главных осей, сохраняет направление этой оси в пространстве при движении его по той или иной траектории. Это позволяет осуществлять стабилизацию тела относительно этой оси до тех пор, пока какие-либо силы, действующие на него, не нарушат стабилизацию.
Активные методы ориентации требуют затраты энергии или массы для создания стабилизирующих моментов. При этом в процессе ориентации происходит потребление энергии или расход массы, запасенной на борту космического летательного аппарата (электроэнергии, сжатого газа, химического топлива), или затраты энергии солнечных батарей. Эти методы позволяют обеспечить ориентацию относительно любой базовой системы отсчета и производить переориентацию, т. е. переход от одной ориентации к другой в тех случаях, когда это необходимо.
Для создания управляющего момента в системах активной ориентации могут применяться реактивные микродвигатели, работающие на сжатом газе или химическом топливе, электрореактивные движители (ионные, плазменные и др.), моментный электропривод, взаимодействующий с магнитным полем Земли, гироскопические устройства или маховики, приводимые в движение электродвигателями.
Часто используются комбинированные методы ориентации. В таких случаях в дополнение к пассивной системе ориентации устанавливается необходимое количество микродвигателей для коррекции действия пассивной системы, предварительного успокоения и компенсации ошибок, возникающих в результате различных возмущающих воздействий, а также для программных поворотов искусственного спутника или космического корабля.
На рисунке 8.17 приведена функциональная схема системы ориентации лунной станции. В качестве опорных ориентиров для станции были выбраны Солнце, Луна, Земля. Солнце и Луна использовались большую часть времени. На заключительном этапе, когда Луна стала близкой и большой, использовалась Земля. Опорные направления определялись с помощью фотоэлектрических датчиков. Кроме того, в систему ориентации входили скоростные гироскопы – датчики угловых скоростей. Угол обзора грубого датчика достаточно широкий (около 190о), что гарантирует «захват Солнца». Затем при полете начинается поиск Луны.
Для этого КА сообщается вращательное движение относительно направления на Солнце. Вращение прекращается после попадания Луны в поле зрения лунного датчика. Так как угол Солнце-станция-Луна меняется в течение полета, то предусматривается автоматическая отработка этого изменения поворотом солнечного датчика с помощью шагового электродвигателя. Ошибка системы ориентации станции не превышает (2÷3)'.

Рисунок 8. 17 – Функциональная схема системы ориентации лунной станции
В конечном итоге, функции систем управления любого КА сводятся к тому, чтобы, во-первых, обеспечить начальное «успокоение» аппарата после его отделения от ракеты-носителя (сведение к минимуму угловой скорости вращения, полученной КА в момент отделения), и, во-вторых, обеспечить соответствующие программные повороты КА вокруг трех взаимно ортогональных строительных осей, жестко связанных с центром масс.
Система управления должна, кроме того, иметь возможность осуществлять поиск специальных ориентиров (Земли, Луны, Солнца, планет Солнечной системы, звезд) и обеспечивать стабилизацию космического аппарата относительно этих ориентиров с точностью, необходимой для работы бортовых аппаратов и научных приборов. В функцию системы управления самим ЛА также входит стабилизация космического летательного аппарата по заданному курсу и автоматическое управление реактивными двигателями для изменения траектории центра масс и маневрирования кораблем.
Управление бортовой аппаратурой с командного пункта производится с помощью системы, которую будем называть радиотелемеханической (рисунок 8.18). Фактическое состояние бортовой аппаратуры и окружающей среды, характеризуемое вектором состояний  , где, например,
, где, например,  - напряжение батарей питания,
- напряжение батарей питания,  - давление и т.д., фиксируется соответствующими бортовыми датчиками. В перерывах между сеансами связи показания датчиков могут записываться в бортовом запоминающем устройстве (ЗУ). Во время сеансов связи запомненные, а также текущие показания датчиков через телеметрическую радиолинию поступают на наземный КП.
- давление и т.д., фиксируется соответствующими бортовыми датчиками. В перерывах между сеансами связи показания датчиков могут записываться в бортовом запоминающем устройстве (ЗУ). Во время сеансов связи запомненные, а также текущие показания датчиков через телеметрическую радиолинию поступают на наземный КП.
 Рисунок 8.18 – Функциональная схема радиотелемеханической системы управления работой бортовой аппаратуры с КП
Рисунок 8.18 – Функциональная схема радиотелемеханической системы управления работой бортовой аппаратуры с КП
В обоих случаях на борту КА часто осуществляется предварительная обработка данных, направленная на уменьшение передаваемых по радиолинии потоков сообщений. Подобная обработка сокращает избыточность при сохранении смыслового содержания информации и исключает информацию, не существенную для получателя. Полученные на пункте сообщения выделяются, регистрируются и направляются на обработку для анализа и принятия решения.
Обычно для этих операций используются ЦВМ. В результате обработки определяется вектор состояния , полученный расчетным путем на основании данных телеметрического контроля фактического состояния бортовой аппаратуры  .
.
Необходимое состояние бортовой аппаратуры является априорно известным и характеризуется вектором  . Очевидно,
. Очевидно,  , поскольку управление осуществляется не по всем контролируемым параметрам. На основании совместного анализа значений и
, поскольку управление осуществляется не по всем контролируемым параметрам. На основании совместного анализа значений и  , выполняемого обычно ЦВМ, оператор принимает решение. Если в аппаратуре КА замечаются какие-либо неполадки или возникает необходимость изменения режимов работы, то на КП формируются команды управления, которые по командной радиолинии передаются на борт. Команды либо исполняются немедленно, либо записываются в программно-временное устройство для последующего исполнения.
, выполняемого обычно ЦВМ, оператор принимает решение. Если в аппаратуре КА замечаются какие-либо неполадки или возникает необходимость изменения режимов работы, то на КП формируются команды управления, которые по командной радиолинии передаются на борт. Команды либо исполняются немедленно, либо записываются в программно-временное устройство для последующего исполнения.
Результаты исполнения контролируются с помощью телеметрической радиосистемы. Программно-временное устройство (ПВУ), находящееся на борту КА, позволяет осуществлять управление в любое время полета, а не только в течение сеанса связи с наземными КП.
Применяют ПВУ двух видов: жесткое и гибкое. Жесткое ПВУ имеет фиксированную программу, составленную из команд, следующих друг за другом в неизменной последовательности. Его программа закладывается до запуска КА и не корректируется в течение полета. Гибкое ПВУ имеет сменную программу, которая может рассчитываться на Земле и передаваться на КА во время полета. При работе с экипажем используется дополнительная связная радиосистема.
На рис. 8.19 представлена структурно-функциональная схема спутников «Космос-14» и «Космос-23», а на рис. 8.20 — внешний вид спутников с указанием пространственного положения отдельных приборов и аппаратов. «Космос-14» имел очень широкую возможность ориентации и стабилизации в пространстве. На нем была установлена трехосная система ориентации и стабилизации, которая позволяла ориентировать данный космический летательный аппарат и с помощью теплового пеленгатора (построителя местной вертикали) и одновременно на Солнце при применении соответствующих датчиков.
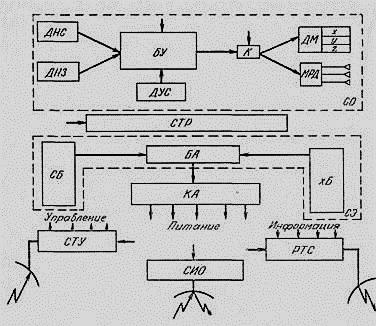
Рисунок 8.19 - Структурно-функциональная схема спутников
«Космос-14» и «Космос-23»:
СО — система ориентации; ДНС — датчик направления на Солнце; ДНЗ — датчик направления на Землю; ДУС — датчик угловой скорости; БУ — блок управления; К — переключатель; ДМ — двигатели-маховики; МРД — микрореактивные двигатели; СЭ — система энергопитания; СБ — солнечные батареи; БА — блок автоматики; хБ — химическая батарея; СТУ — система телеуправления; СИО — система измерения орбиты; РТС — радиотелеметрическая система; СТР — система терморегулирования; КА — коммутационный автомат

Рисунок 8.18 - Общий вид искусственных спутников Земли «Космос-14» и «Космос-23»
В полете был исследован режим «закрутки» всего спутника вместе с раскрытыми солнечными батареями вокруг оси, ориентированной на Солнце с помощью электродвигателей-маховиков. При этом солнечные батареи были жестко закреплены относительно корпуса спутника.
Различают два вида маневров КА: продольные и боковые. Первые изменяют параметры орбиты без поворота плоскости орбиты КА, а вторые приводят к изменению положения плоскости орбиты КА в инерциальном пространстве.
Ошибки управления движением центра масс КА характеризует обобщенный вектор промаха. В общем случае он имеет шесть компонент: три координатных и три скоростных  . Компоненты вектора промаха вычисляются для фиксированных моментов времени или для заданных значений определенных параметров, например, углового расстояния от фиксированной точки. Для фиксированного момента времени первые три компоненты вектора промаха представляют собой отклонения фактических координат КА от тех, которые были бы в этот момент при движении КА по номинальной траектории. Три другие компоненты показывают аналогичные отклонения составляющих вектора скорости.
. Компоненты вектора промаха вычисляются для фиксированных моментов времени или для заданных значений определенных параметров, например, углового расстояния от фиксированной точки. Для фиксированного момента времени первые три компоненты вектора промаха представляют собой отклонения фактических координат КА от тех, которые были бы в этот момент при движении КА по номинальной траектории. Три другие компоненты показывают аналогичные отклонения составляющих вектора скорости.
Учет всех шести компонент вектора промаха важен в таких задачах, как, например, стыковка КА или мягкая посадка в заданную область на поверхности небесных тел.
Дата добавления: 2017-09-01; просмотров: 6249;
Поиск по сайту
Узнать еще
- Cущность организации и ее основные признаки
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Тотальные (общие) морфологические признаки.
- II. Общие методические принципы в канистерапии
- II. Оппозиционные организации и их роль в подготовке революции
- III. Старение и усталость. Вибрация. Коррозия деталей машин. Краткие сведения по теории трения. Виды трения. Основные требования и определения
- III. Уровни организации живого
- III. Формирование личности посредством профориентации и организации досуговой деятельности.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
