Асинхронная передача данных
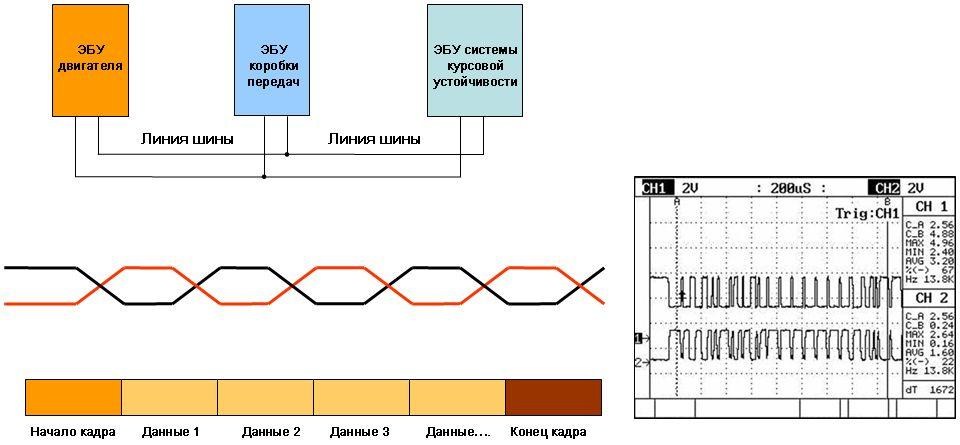
Второй метод — асинхронная передача данных. В этом случае передача данных происходит только тогда, когда это необходимо. Из-за отсутствия постоянного обмена данными необходимо использовать стартовый и стоповый биты. Когда требуется начать передачу данных, состояние линии изменяется с 1 на 0 (стартовый бит). В типичной системе асинхронной передачи данных имеется только линия передачи данных, но нет отдельной линии синхронизации. Форма сигнала и кадр данных имеют аналогичный вид. Важное отличие заключается в том, что кадр данных включает стартовый и стоповый биты. Линия передачи данных может состоять из одной линии или двух линий, как в примере на слайде. В этом случае для кодирования данных используется разность напряжений между двумя линиями. Например, отсутствие разности напряжений может представлять значение бита 1, а ее наличие — 0.
Линия К
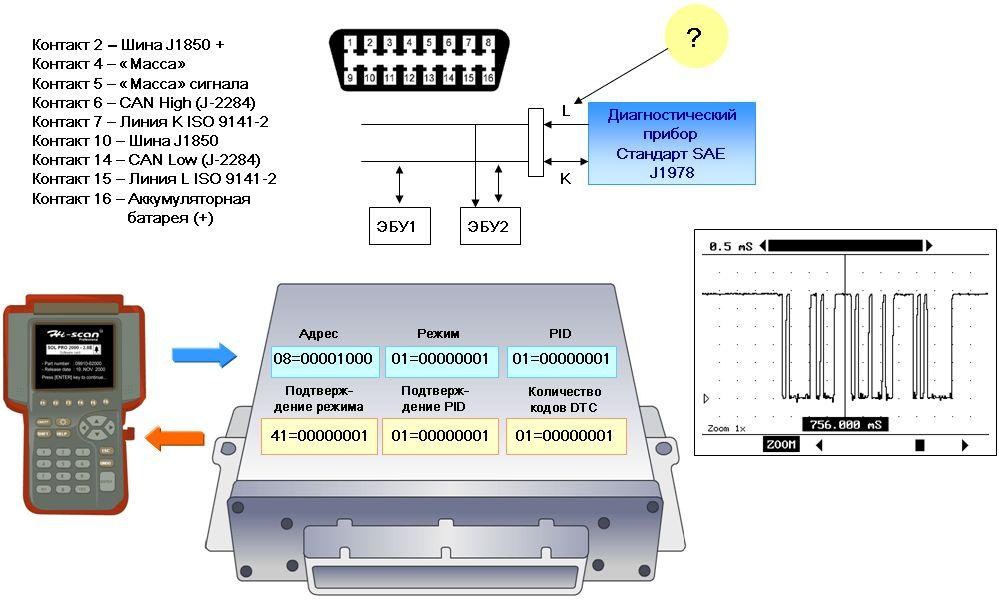
Стандарт ISO 9141/SAE J 1978 определяет протокол для линии K. Линия K — это последовательная шина для обмена данными между диагностическим прибором Hi-scan pro или другим прибором и различными ЭБУ автомобиля. В данном случае в протоколе определено даже назначение контактов. Обратите внимание, что в разъеме канала передачи данных имеются контакты для различных коммуникационных линий. Для диагностики производители могут использовать различные протоколы. Кроме того, могут быть различия в протоколе в разных моделях автомобилей. По существу, подключенный диагностический прибор является просто еще одним устройством, участвующим в обмене данными по сети. Обмен данными между диагностическим прибором и соответствующим блоком управления похож на задавание вопросов и получение ответов на них.
Диагностический прибор отправляет запрос блоку управления, а блок управления отвечает или выполняет соответствующие действия. Такой вопрос и ответ представляют собой пакеты данных, которые передаются побитно в определенном кадре данных. Диагностический прибор отправляет запрос на определенный адрес, например ЭБУ двигателя, затем указывает так называемый режим, который описывает группу функций (например, связанных с кодами диагностики), и идентификатор PID, который определяет функцию в выбранном режиме (например, количество кодов DTC). Затем блок управления выдает определенный ответ с соответствующими данными. На начальных этапах каждый производитель использовал собственные схемы адресации и кодирования данных, но после внедрения бортовых систем диагностики была достигнута унификация формата адресов и данных, касающихся выхлопных газов, что позволило применять сторонние диагностические приборы.
В примере выше ЭБУ двигателя имеет адрес 08, задача считывания кодов диагностики относится к режиму 1, а на первом этапе необходимо выяснить количество имеющихся кодов неисправностей (этому действию соответствует идентификатор PID 01). Получив запрос от диагностического прибора, блок управления предоставляет соответствующий ответ, содержащий подтверждение режима, идентификатор PID запроса и результат.
При наличии неисправности ответ может иметь следующий вид:
00 00 0001 0100 0011 для P 0 1 4 3
Два первых блока содержат только по два бита, так как этого достаточно для представления всех возможных вариантов. Примечание: в некоторых моделях автомобилей имеется вторая шина CAN от ЭБУ двигателя (ECM) или ЭБУ силовой передачи (PCM) к универсальному разъему (в моторном отсеке). Эта шина предназначена для перепрограммирования ЭБУ, а не для диагностики.
Шина CAN
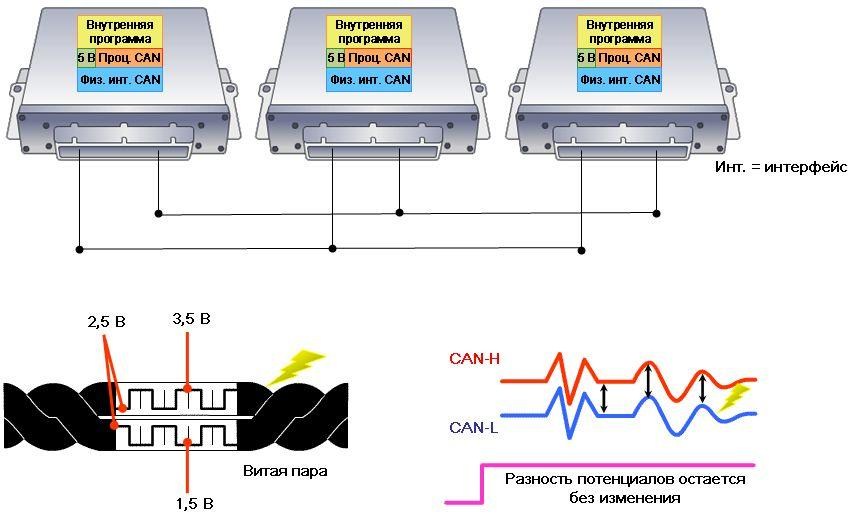
При использовании шины CAN (Controller Area Network) все задействованные ЭБУ подключены только к двум проводам — CAN High и CAN Low. Для передачи информации используется разностный сигнал, т. е. разность напряжений между проводами High и Low. Пропускная способность шины CAN может достигать 1 Мбит/с, но в наших автомобилях применяется фиксированная скорость 500 кбит/с. Очень часто два провода скручены между собой. Это делается для того, чтобы при наличии помех изменение напряжения было одинаковым на обеих линиях. В этом случае разность напряжений не изменяется, и, соответственно, помехи не будут оказывать влияния на состояние бита (1 или 0). Другой способ снижения влияния помех на сигнал CAN заключается в установке нагрузочных резисторов на каждом из концов шины CAN. Сопротивление каждого резистора составляет 120 Ом. Передача данных через шину CAN будет возможна даже в случае повреждения или удаления резисторов. Очевидно, такая ситуация приведет к «странному» поведению системы и возникновению кодов DTC. Обратите внимание на то, что шина отвечает только за передачу и отбор сообщений между ЭБУ. Шина не оказывает влияния на обработку данных. Рассмотрим пример, в котором требуется передать информацию о температуре охлаждающей жидкости двигателя от одного ЭБУ другому. Этот процесс протекает следующим образом. ЭБУ 1 получает аналоговый сигнал от датчика температуры охлаждающей жидкости двигателя. Внутренняя программа ЭБУ преобразует этот сигнал в цифровую форму и обрабатывает его. Чтобы отправить данные на другой ЭБУ, внутренняя программа передает цифровые данные процессору CAN. Процессор CAN преобразует данные в формат CAN и передает их физическому интерфейсу CAN, который создает сигналы определенного уровня на линии шины. Физические интерфейсы других узлов принимают сигнал. Сигнал преобразуется обратно в форму, понятную процессору CAN. Процессор проверяет приоритет и релевантность сигнала для соответствующего ЭБУ. Если информация релевантна, она передается внутренней программе ЭБУ для дальнейшей обработки. Если нет, она игнорируется.
Дата добавления: 2021-09-07; просмотров: 857;
Поиск по сайту
Узнать еще
- STEP – стандарт для описания данных об изделии
- АВТОМАТИЗИРОВАННАЯ ОБРАБОТКА ДАННЫХ В СЛУЖБЕ ПРИЕМА И РАЗМЕЩЕНИЯ
- Автоматизированная система технической паспортизации (АСПАД) и создание автоматизированного банка дорожных данных (АБДЦ).
- Автоматизированная система технической паспортизации дорог и создание банка дорожных данных
- АВТОМАТИЗИРОВАННЫЕ БАНКИ ДАННЫХ, ИНФОРМАЦИОННЫЕ БАЗЫ, ИХ ОСОБЕННОСТИ
- Автоматизированные банки дорожных данных.
- Адресация и протоколы данных в сети Интернет.
- Анализ данных и подготовка заключительного доклада

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
