Широтно-импульсная модуляция
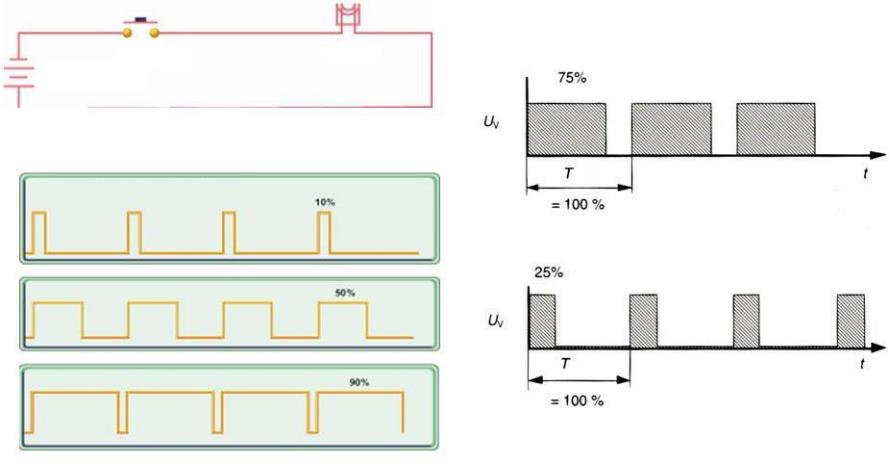
| Выключатель |
| Лампа |
| Батарея |
| (9 |
| Вольт) |
| Включен = Высокий уровень |
| Выключен = Низкий уровень |
Помимо реостата применяется еще один способ управления напряжением. Это широтноимпульсная модуляция (PWM). PWM означает, что ток появляется и исчезает с определенной частотой. Известно, что для управления скоростью вращения электродвигателя необходим источник постоянного тока с изменяемым напряжением. Однако если взять электродвигатель с номинальным рабочим напряжением 12 Вольт и подключить к нему источник питания, двигатель начнет раскручиваться: он не среагирует мгновенно, поэтому ему потребуется некоторое время, чтобы достичь максимальной частоты вращения. Если отключить источник питания сразу после того, как двигатель достигнет максимальной скорости, он начнет останавливаться. Если быстро включать и отключать источник питания, скорость вращения двигателя будет находиться в диапазоне от 0 до максимальной. Именно это и делает блок управления PWM: он включает двигатель с помощью серии последовательных импульсов. Для управления скоростью вращения двигателя контроллер изменяет (модулирует) ширину импульсов — отсюда и название широтно-импульсная модуляция. Если, например, источник напряжения имеет 9 Вольт, скважность сигнала составляет только 10%, на выходе получается сигнал 0,9 Вольт. На рисунке приведен пример подключения к батарее лампы накаливания. Если подключать лампу к 9-вольтовой батарее на 50 мс, то она будет получать напряжение 9 Вольт. Но если отключить соединение на следующие 50 мс, напряжение ее питания составит 0 Вольт. В результате повторения этого цикла с частотой 10 раз в секунду, лампа будет светить вполнакала, так как подводимое к ней напряжение составит 4,5 Вольта, то есть 50% от 9 Вольт. В этом случае говорят, что скважность сигнала составляет 50%, а его частота — 10 Гц.
Обратите внимание, что время периода сигнала — величина постоянная, меняется лишь соотношение продолжительности включения и выключения.
Датчики
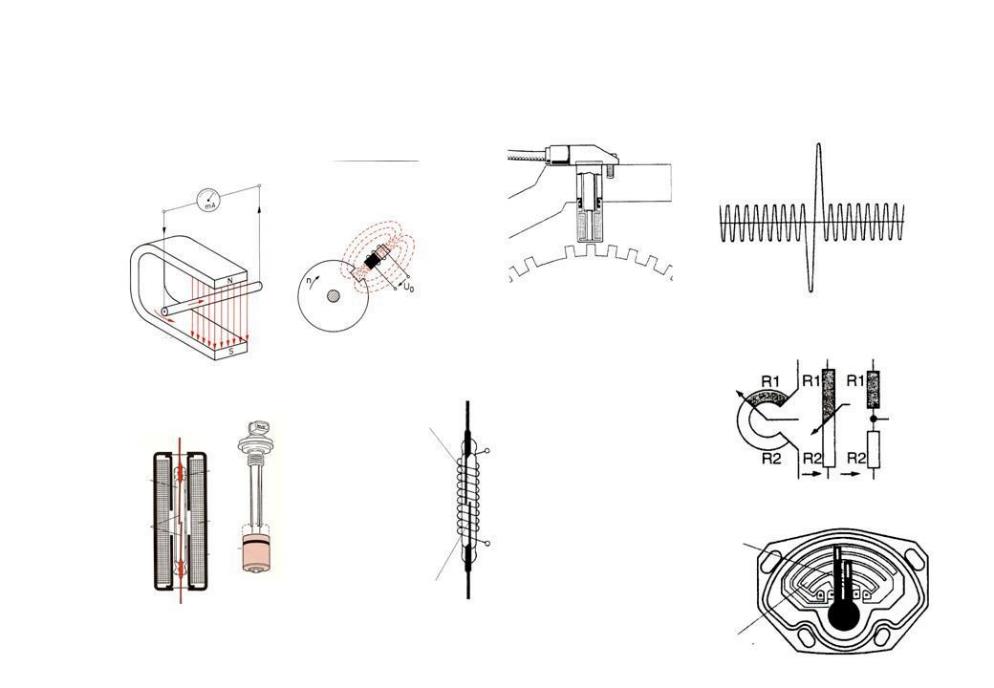
Чтобы получать информацию о режимах работы двигателя, применяются датчики.Электрические сигналы необходимы не только приводным устройствам, но и датчикам. В основе их работы лежат электрические явления. Датчики преобразуют физические характеристики работы двигателя и его систем в электрические сигналы. Для различных приводов и для датчиков используются различные свойства электричества. Например, с помощью явления магнитной индукции, реализованной в датчике угла поворота коленчатого вала, можно определить частоту вращения двигателя. Переменное сопротивление применяется для определения температуры и т. д. На нижнем правом рисунке изображен резистор с переменным сопротивлением, благодаря которому определяется положение поворотного устройства, например, дроссельной заслонки.
Дата добавления: 2021-09-07; просмотров: 636;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
