Кинематическая схема балансирного станка-качалки
Кинематическая схема балансирного станка-качалки представляет собой четырёхзвенник ОВСD.
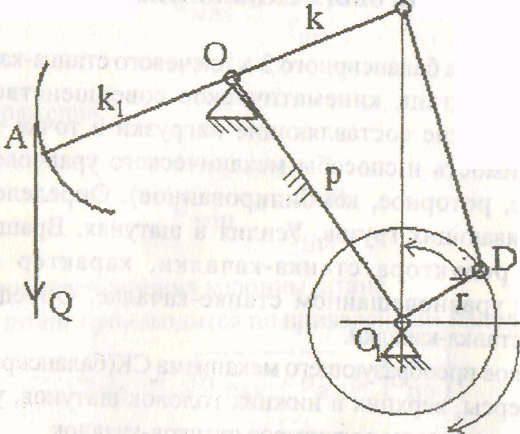 Неподвижное звено – ОD, подвижные звенья – кривошип (r), шатун (l) и заднее плечо балансира (b). При вращении кривошипа точка С описывает окружность радиуса r, а точка В движется по дуге радиуса b.
Неподвижное звено – ОD, подвижные звенья – кривошип (r), шатун (l) и заднее плечо балансира (b). При вращении кривошипа точка С описывает окружность радиуса r, а точка В движется по дуге радиуса b.
Определим закон движения точки В, но для упрощения сделаем некоторые допущения, а именно:
- точка В движется не по дуге, а по прямой;
- радиус кривошипа намного меньше длины балансира;
- угол β, образованный шатуном и линией, соединяющей центр кривошипа с точкой В, принимается равным нулю;
тогда, закон движения т. В соответствует закону движения поршня насоса с кривошипно-шатунным механизмом или SВ = r (l – cos α).
Скорость движения точки В будет равна:
vB = ω r sin α,
а ускорение:
wB = ω2 r cos α.
Тогда путь, скорость и ускорение т. А определяются соотношением плеч балансира а и b :
SA =  r( l- cos α)
r( l- cos α)
vA = ω r sin α
wA = ω2 r cos α,
где ω – угловая скорость вращения кривошипа.
Графики изменения скорости и ускорения точки подвеса колонны штанг – это синусоида и косинусоида соответственно.
Более точно закономерность изменения перемещения, скорости и ускорения точки подвеса штанг может быть определена с помощью приближенного расчета.
Кинематическое совершенство станка-качалки характеризуется коэффициентом m, который определяется по формуле:
m =  ,
,
где wmax – максимальное ускорение точки подвеса штанг станка-качалки; w0 – ускорение при гармоничном движении.
Для определения показателя m удобно пользоваться следующей формулой:
m = 
В зависимости от глубины подвески насоса допустимый коэффициент кинематического совершенства изменяется и для глубоких скважин должен быть не более 1,3.
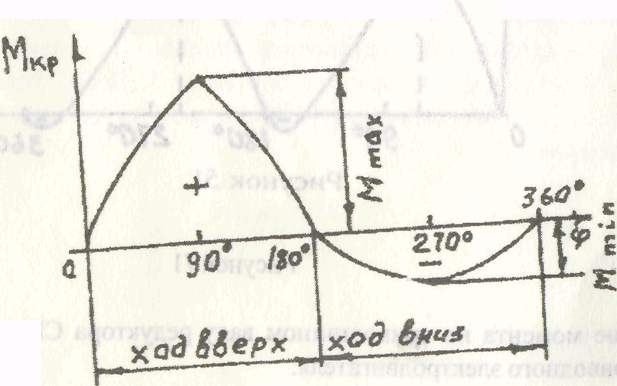
Нагрузки на головку балансира СК складываются из статических (вес столба жидкости и колонны штанг) и динамических (от движущихся масс столба жидкости и колонны штанг). Максимальные нагрузки возникают при ходе вверх и определяются:
Pmax = Pж + Ршт + Ржi + Pштi + R
Дата добавления: 2017-05-02; просмотров: 3205;
Поиск по сайту
Узнать еще
- A Схема затяжки болтов ГБЦ; болты 5 и 7 длиннее остальных и устанавливаются в свои места
- II. Электрическая схема и принцип действия.
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- Pис. 2.23. Схема межсистемных венозных анастомозов (схема).
- V. Упрощенная схема замещения трансформатора и внешняя характеристика.
- А – схема структурная; б – схема эквивалентная
- Агрегація криптографічних перетворень, криптографічна схема
- Алгоритм решения задач кинематики вращательного движения НМС вокруг неподвижной оси – схема алгоритма К03 ВДТ с комментариями и примерами

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
