При ходе вниз нагрузки минимальные
Pmin = Ршт - Pштi – R,
где Рж – вес столба жидкости;
Ршт – вес штанг;
Ржi – инерционная нагрузка от веса жидкости;
 Pштi – инерционные силы от веса штанг;
Pштi – инерционные силы от веса штанг;
R – силы трения.
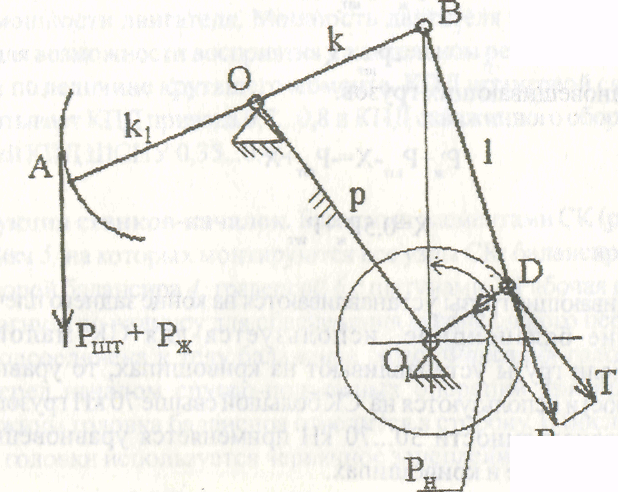
Нагрузки на головку балансира СК, через балансир и шатуны передаются на кривошипный вал редуктора СК.
В точке D усилие шатуна Ршат раскладывается на нормальное Рн и тангенцальное Т.
Сила Т создает крутящий момент на кривошипном валу редуктора:
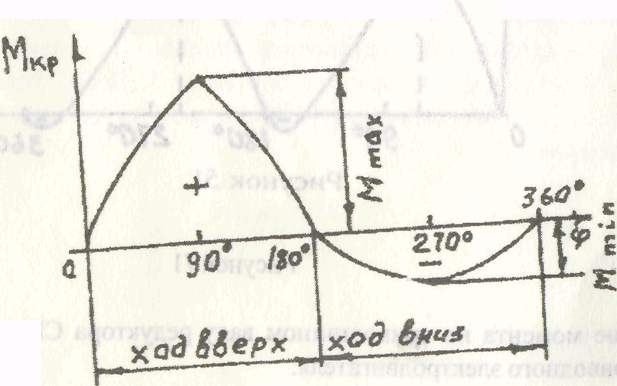
Мкр = Т r = Pшат r sin φ
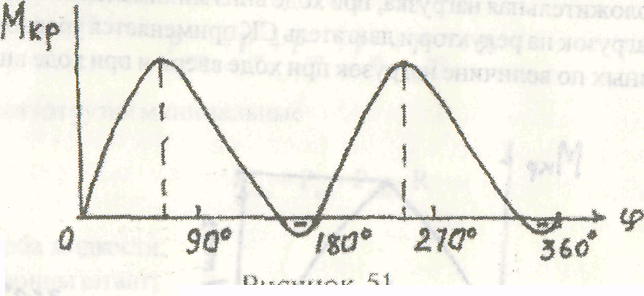
C учетом изменения нагрузки в течении двойного хода головки балансира от максимального значения до минимального и синусоидальным характером изменения тангенциальной силы, график изменения крутящего момента неуравновешенного СК выглядит следующим образом.
Резкие колебания нагрузок создают ненормальный режим работы двигателя и усиливают износ всех узлов СК.
Для выравнивания нагрузки на редуктор и двигатель СК применяется уравновешивание, т.е. обеспечение равных по величине нагрузок при ходе вверх и при ходе вниз.
При ходе вверх
Pж + Ршт – Х
При ходе вниз
- Ршт + Х
где Х – величина уравновешивающих грузов.
Pж + Ршт – Х = - Рш + Х
Х = 0,5 Рж + Ршт
Урановешивание обеспечивает положительные значения крутящего момента как при ходе вверх, так и при ходе вниз.
 Уравновешивание бывает трех видов:
Уравновешивание бывает трех видов:
- балансирное (используется для СК грузоподъемностью до 30 кН);
- кривошипное (роторное) – для СК свыше 70 кН;
- комбинированное – для СК 30…70 кН.
Недостатком балансирного урановешивания является дополнительные инерционные силы от массы груза. При роторном урановешивании инерционные усилия воспринимаются только подшипниками кривошипного вала и при его постоянной угловой скорости вращения не передаются на другие детали установки.
Уравновешивание обычно производят в соответствии с заводскими инструкциями для каждого типа СК. На прмыслах при эксплуатации СК уравновешенность систематически проверяют по нагрузке э/д с помощью токоизмерительных клещей.
Мощность приводного двигателя рассчитывается по формуле:
N = Mкр ω
Но так как значение момента постоянно меняется, то мощность двигателя подбирают с некоторым завышением.
Кинематическая схема балансирного станка-качалки представляет собой четырёхзвенник ОВСD.
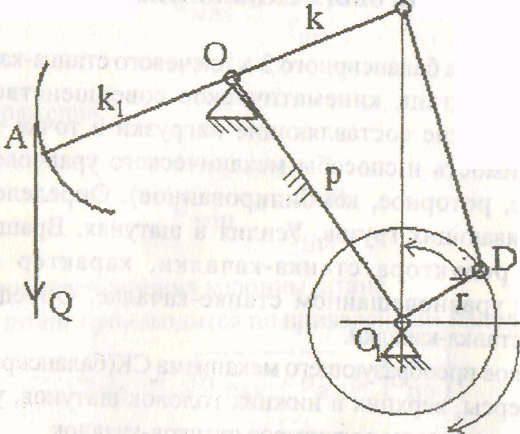
Неподвижное звено – ОD, подвижные звенья – кривошип (r), шатун (l) и заднее плечо балансира (b). При вращении кривошипа точка С описывает окружность радиуса r, а точка В движется по дуге радиуса b.
Определим закон движения точки В, но для упрощения сделаем некоторые допущения, а именно:
- точка В движется не по дуге, а по прямой;
- радиус кривошипа намного меньше длины балансира;
- угол β, образованный шатуном и линией, соединяющей центр кривошипа с точкой В, принимается раным нулю;
тогда, закон движения т. В соответствует закону движения поршня насоса с кривошипно-шатунным механизмом или SВ = r (l– cos α).
Скорость движения точки В будет равна:
vB = ω r sin α,
а ускорение:
wB = ω2 r cos α.
Тогда путь, скорость и ускорение т. А определяются соотношением плеч балансира а и b :
SA =  r( l- cos α)
r( l- cos α)
vA = ω r sin α
wA = ω2 r cos α,
где ω – угловая скорость вращения кривошипа.
Графики изменения скорости и ускорения точки подвеса колонны штанг – это синусоида и косинусоида соответственно.
Более точно закономерность изменения перемещения, скорости и ускорения точки подвеса штанг может быть определена с помощью приближенного расчета.
Кинематическое совершенство станка-качалки характеризуется коэффициентом m, который определяется по формуле:
m =  ,
,
где wmax – максимальное ускорение точки подвеса штанг станка-качалки; w0 – ускорение при гармоничном движении.
Для определения показателя m удобно пользоваться следующей формулой:
m = 
В зависимости от глубины подвески наоса допустимый коэффициент кинематического совершенства изменяется и для глубоких скважин должен быть не более 1,3.
Т. о., кинематическое совершенство станка-качалки определяется соотношениями звеньев – r/l, r/b и а/b. Эти параметры в сочетании с максимальной нагрузкой в точке подвеса штанг, а также длиной её хода определяют конструкцию, габариты, массу и эксплуатационные характеристики станка-качалки.
Нагрузки на головку балансира СК складываются из статических (вес столба жидкости и колонны штанг) и динамических (от движущихся масс столба жидкости и колонны штанг).
Максимальные нагрузки возникают при ходе вверх и определяются:
Pmax = Pж + Ршт + Ржi + Pштi + R
При ходе вниз нагрузки минимальные
Pmin = Ршт - Pштi – R,
где Рж – вес столба жидкости;
Ршт – вес штанг;
Ржi – инерционная нагрузка от веса жидкости;
Pштi – инерционные силы от веса штанг;
R – силы трения.
Нагрузки на головку балансира СК, через балансир и шатуны передаются на кривошипный вал редуктора СК.
В точке С усилие шатуна Ршат раскладывается на нормальное Рн и тангенцальное Т.
Сила Т создает крутящий момент на кривошипном валу редуктора:
Мкр = Т r = Pшат r sin φ
C учетом изменения нагрузки в течении двойного хода головки балансира от максимального значения до минимального и синусоидальным характером изменения тангенциальной силы, график изменения крутящего момента неуравновешенного СК выглядит следующим образом.
 Резкие колебания нагрузок создают ненормальный режим работы двигателя и усиливают износ всех узлов СК. Для выравнивания нагрузки на редуктор и двигатель СК применяется уравновешивание, т.е. обеспечение равных по величине нагрузок при ходе вверх и при ходе вниз.
Резкие колебания нагрузок создают ненормальный режим работы двигателя и усиливают износ всех узлов СК. Для выравнивания нагрузки на редуктор и двигатель СК применяется уравновешивание, т.е. обеспечение равных по величине нагрузок при ходе вверх и при ходе вниз.
Производят уравновешивание путём установки грузов на балансире или кривошипах.
Уравновешивание бывает трех видов:
- балансирное (используется для СК грузоподъемностью до 30 кН);
- кривошипное (роторное) – для СК свыше 70 кН;
- комбинированное – для СК 30…70 кН.
При ходе вверх Pж + Ршт – Х
При ходе вниз - Ршт + Х
где Х – величина уравновешивающих грузов.
Pж + Ршт – Х = - Ршт + Х
Х = 0,5 Рж + Ршт
Урановешивание обеспечивает положительные значения крутящего момента как при ходе вверх, так и при ходе вниз.
Из графика видно, что даже в правильно уравновешенном станке-качалке не исключены значения отрицательных нагрузок возникающих в моменты изменения направления хода. Они обусловлены динамическими нагрузками.
Недостатком балансирного уравновешивания является дополнительные инерционные силы от массы груза. При роторном уравновешивании инерционные усилия воспринимаются только подшипниками кривошипного вала и при его постоянной угловой скорости вращения не передаются на другие детали установки.
Уравновешивание обычно производят в соответствии с заводскими инструкциями для каждого типа СК. Так, место установки противовесов на кривошипах определяется по графикам, имеющимся в паспортах станков-качалок.
На промыслах при эксплуатации СК уравновешенность систематически проверяют по нагрузке э/д с помощью токоизмерительных клещей.
Мощность приводного двигателя рассчитывается по формуле:
N = Mкр ω
Но так как значение момента постоянно меняется, то мощность двигателя подбирают с некоторым завышением.
Дата добавления: 2017-05-02; просмотров: 2800;
Поиск по сайту
Узнать еще
- Appeal –привлекательность.
- Applications (приложения)
- Cила резания при точении
- Cущность организации и ее основные признаки
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- D-элементы, их применение в медицине и фармации.
- F50 Расстройства приема пищи
- He рекомендуем использовать данный метод, если в дальнейшем будет необходимость прибегнуть к отгибу приборной панели.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
