Частотный способ регулирования.
Рассмотрим преобразователь частоты:
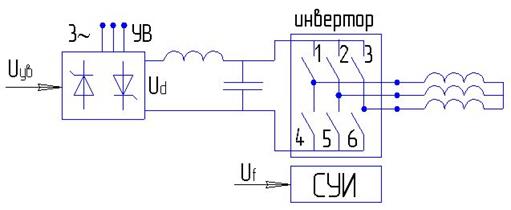
УВ – управляемый выпрямитель;
СУИ – система управления инвертором.
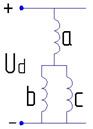
1 фаза: включены 1, 5 и 6 ключи:

2 фаза включены 1, 2 и 6 ключи:


3 фаза включены 4, 2 и 6 ключи:


4 фаза включены 4, 2 и 3 ключи:


5 фаза включены 4, 5 и 3 ключи:


6 фаза включены 1, 5 и 3 ключи:


7 фаза соответствует первой.
Построим график напряжения на одной из фаз (фазе а).

Процесс коммутации ключей в инверторе может происходить с управляемой частотой, которая задается управляемым входом U¦.


Тк – период коммутации.
Uув определяет величину амплитуды, так как 
Для обоих параметров Uув и U¦ существуют отдельные входа.
 , где ¦Г – первая гармоника, ¦1 – шестая гармоника.
, где ¦Г – первая гармоника, ¦1 – шестая гармоника.


 Высшие гармоники также создают вращающиеся магнитные поля, но с кратными скоростями.
Высшие гармоники также создают вращающиеся магнитные поля, но с кратными скоростями.
Высшие гармоники мешают работать двигателю, создавая дополнительный нагрев, поэтому от них следует избавляться. Ранее это было нереализуемо, так как тиристорные преобразователи требуют большой энергии для запирания, а значит большими будут и потери. Прорыв в этой области связан с появлением IGBT.
IGBT – биполярный транзистор с изолированным затвором. Включение/выключение с частотой 1…5 мкс Þ малы потери; существует возможность выключения.


¦ком=30 кГц.
Принцип формирования выходного напряжения сходен с принципом используемым в преобразователях ШИМ.





w0е>w01>w02>w03
 при уменьшении w0.
при уменьшении w0.
Увеличение Мк при уменьшении w0 ведет к большим потерям.
Меняя Uув можно изменять амплитуду.
 Можно обеспечить постоянство Мк на искусственных характеристиках, если
Можно обеспечить постоянство Мк на искусственных характеристиках, если  , это предписывает согласованное управление напряжением и частотой:
, это предписывает согласованное управление напряжением и частотой:  - закон частотного управления, которое позволяет формировать характеристики АД такими же, как и у ДПТ.
- закон частотного управления, которое позволяет формировать характеристики АД такими же, как и у ДПТ.
w0е>w01>w02>w03>…>w0i>…
Увеличение частоты вращения выше основной (номинальной) должно сопровождаться увеличением напряжения, запасы которого обычно ограничены напряжением сети.
 Выйти во II зону возможно, если научиться ослаблять главный магнитный поток в зазоре. Это возможно в векторных замкнутых системах регулирования.
Выйти во II зону возможно, если научиться ослаблять главный магнитный поток в зазоре. Это возможно в векторных замкнутых системах регулирования.
Энергетика частотного способа регулирования:
 - мощность, развиваемая электромагнитным полем статора.
- мощность, развиваемая электромагнитным полем статора.
 - мощность на валу.
- мощность на валу.
w<w0

DР – потери энергии из-за скольжения ротора относительно поля статора.


 В силу одинаковости наклона при частотном способе регулирования потери будут одинаковы на всех искусственных характеристиках и равны потерям на естественной характеристике.
В силу одинаковости наклона при частотном способе регулирования потери будут одинаковы на всех искусственных характеристиках и равны потерям на естественной характеристике.
Дата добавления: 2017-05-02; просмотров: 1507;
Поиск по сайту
Узнать еще
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу
- I. Способы представления переменного синусоидального тока и напряжения.
- II. Решение логических задач табличным способом
- MS Word. Выделение текста. Понятие фрагмента текста. Способы форматирования фрагментов, работа с фрагментами (копирование, удаление, перемещение).
- V. СПОСОБЫ ПОЛУЧЕНИЯ И ХИМИЧЕСКИЕ СВОЙСТВА АЦЕТИЛЕНОВЫХ И ДИЕНОВЫХ УГЛЕВОДОРОДОВ
- VII. Риски и способы их минимизации
- XII. ДОПОЛНИТЕЛЬНЫЕ ТРЕБОВАНИЯ ПРИ ГИДРАВЛИЧЕСКОМ СПОСОБЕ ДОБЫЧИ УГЛЯ
- Yandex_direct_print() Теплоизоляция - требования, способы крепления

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
