Основы теории управления
Современный этап развития промышленного производства характеризуется переходом к использованию передовых технологий, стремлением добиться предельно высоких эксплуатационных характеристик как действующего, так проектируемого оборудования, необходимостью свести к минимуму любые производственные потери. Все это возможно только при условии существенного повышения качества управления промышленными объектами, в том числе путем широкого применения автоматического управления.
Технико-экономическими предпосылками создания автоматического регулирования являются, прежде всего, рост масштабов производства, увеличение единичной мощности оборудования, усложнение производственных процессов, ужесточение требований к промышленной безопасности на опасных производственных объектах, использование форсированных режимов (повышения давления, температуры, вибрации), функционирование установок в критических режимах усиление и усложнение связей между отдельными звеньями технологического процесса. В настоящее время предъявляются новые требования к масштабам использования и к техническому уровню автоматических систем, к обеспечению надежности, точности, быстродействия, экономичности, т.е. к эффективности их функционирования.
Управление, осуществляемое без участия человека, называют автоматическим,а техническое устройство, выполняющее в этом случае функции управления, - автоматическим управляющим устройствомили контроллером.Объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления.Обычно контроллер действует на объект управления не прямо, а через исполнительные механизмы (приводы),
которые могут усиливать и преобразовывать сигнал управления. Например, электрический сигнал может «превращаться» в перемещение клапана. Чтобы контроллер мог «видеть», что фактически происходит с объектом, нужны датчики. С помощью датчиков измеряются те характеристики объекта, которыми нужно управлять. Качество управления можно улучшить, если получать дополнительную информацию - измерять внутренние свойства объекта.
Итак, в типичную систему управления входят управляемый объект, контроллер, привод и датчики в соответствии с рисунком 9 {показано на фолии 35). Однако, набор этих элементов, еще не система. Для превращения в систему нужны каналы связи, через них идет обмен информации между элементами. Взаимосвязанные элементы - это уже система, которая обладает особыми свойствами, которых нет у отдельных элементов и любой их комбинации. На систему действует окружающая среда - внешние возмущения, которые мешают контроллеру выполнить поставленную задачу. Большинство возмущений заранее не предсказуемы, то есть, носят случайный характер. Кроме того, датчики измеряют параметры не точно, а с некоторой ошибкой. В этом случае говорят о «шумах измерений». Ниже приведена структурная схема системы управления.
 задание
задание
Управление
*- шумы измерении
* внешние возмущения
Рисунок 9 - Структурная схема системы управления
Информация в системе управления как бы ходит по кругу: контроллер выдает сигнал управления на привод, который воздействует непосредственно на объект; затем информация об объекте через датчики возвращается обратно к контроллеру и все начинается заново. В данной системе есть обратная связь, то есть контроллер использует информацию о состоянии объекта для выработки управления. Системы с обратной связью называют замкнутыми, поскольку информация передается по замкнутому контуру.
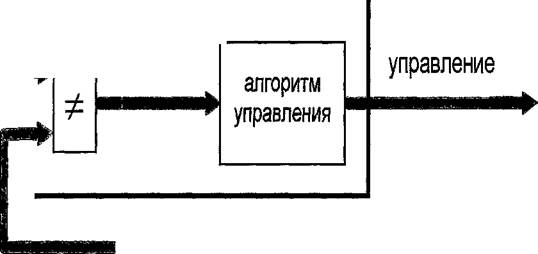
Контроллер сравнивает заданный сигнал с сигналами обратной связи от датчиков и определяет рассогласование - разницу между заданным и фактическим состоянием в соответствии с рисунком 10 {показано на фолии 36). Если оно равно нулю, никакого управления не требуется. Если разница есть, контроллер выдает управляющий сигнал, который стремится свести рассогласование к нулю. Схема контроллера приведена ниже.
|
| рассогласование (ошибка) |
| задание |
обратнаясвязь
Рисунок 10 - Схема контроллера
Такая схема показывает управление по ошибке (отклонению). Это значит, что для того, чтобы контроллер начал действовать, нужно, чтобы заданная величина отклонилась от заданного значения. Блок, обозначенный знаком «^», находит рассогласование. В простейшем случае в нем из заданного значения вычитается сигнал обратной связи (измеренное значение).
Можно ли управлять объектом так, чтобы не было ошибки? В реальных системах - нет. Прежде всего, из-за внешних воздействий и шумов, которые заранее неизвестны. Кроме того, объекты управления обладают инерционностью, то есть, не могут мгновенно перейти из одного состояния в другое. Возможности контроллера и приводов (мощность сигнала управления) всегда ограничены, поэтому быстродействие системы управления (переход работы системы на новый режим) также ограничена.
Автоматические системы управления применяются для решения трех типов задач:
- стабилизация, то есть поддержание заданного режима работы, который не меняется длительное время;
- программное управление - управление по заранее известной программе;
- слежение за задающим сигналом.
К системам стабилизации относится, например, поддержание заданного давления на выходе ГРС. Системы программного управления широко используются в бытовой технике, например, в стиральных машинах. Следящие системы служат для усиления и преобразования сигналов при передаче команд по каналам связи, например, через Интернет. В системах автоматического управления ГРС в основном решаются первый и третий тип задач.
По количеству входов и выходов системы бывают:
- одномерные системы, у которых один вход и один выход;
- многомерные системы, имеющие несколько входов и/или выходов (в основном применяемые на современных производствах, в том числе и на ГРС).
Исследование многомерных систем - достаточно сложная задача. Поэтому при изучении и в инженерных расчетах стараются упрощенно представить многомерную систему как несколько одномерных.
По характеру сигналов системы могут быть:
- непрерывными, в которых все сигналы - функции непрерывного времени, определенные на некотором интервале;
- дискретными, в которых используются дискретные сигналы (последовательности чисел), определенные только в отдельные моменты времени;
- непрерывно-дискретными, в которых есть как непрерывные, так и дискретные сигналы.
Самый простой вариант - считать, что все параметры объекта определены (заданы) точно, так же, как и внешние воздействия. В этом случае мы говорим о детерминированных системах. В реальных задачах точных данных у нас нет. Прежде всего, это относится к внешним воздействиям. Системы, в которых действуют случайные возмущения или параметры объекта могут изменяться случайным образом, называются вероятностными. Например, нельзя гарантировать, что отклонение давление газа на выходе ГРС будет не более 0.01 мгП, но можно попытаться обеспечить такое отклонение с некоторой вероятностью (вероятность 99% означает, что требование будет выполнено в 99 случаях из
по
100). Требования к системе можно сформулировать в виде задачи оптимизации. В оптимальных системах регулятор строится так, чтобы обеспечить минимум или максимум какого-то критерия качества. Выражение «оптимальная система» не означает, что она действительно идеальная.
В целом можно выделить следующие основные требования:
- точность - в установившемся режиме система должна поддерживать заданное значение выхода системы, причем ошибка (разница между заданным и фактическим значением) не должна превышать допустимую;
- устойчивость - система должна оставаться устойчивой на всех режимах, не должна идти «вразнос» (ГРС не должна останавливаться при увеличении давления на входе);
- качество переходных процессов - при смене заданного значения система должна переходить в нужное состояние быстро и плавно;
Система должна сохранять устойчивость и приемлемое качество даже в том случае, если динамика объекта и свойства внешних возмущений немного отличаются от тех, что использовались при проектировании.
Дата добавления: 2021-06-28; просмотров: 844;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- D. ОСНОВЫ МЕДИЦИНСКОЙ МИКОЛОГИИ
- II. Методологические основы педагогики.
- II. Основые приемы освоения духовых
- III.Акустические основы настройки музыкальных инструментов
- Money Management - основы управления капиталом
- VI. ОСНОВЫ ЭКОЛОГИЧЕСКОЙ МИКРОБИОЛОГИИ
- А. Основы организации неживой природы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
