Гидравлические экскаваторы.
В мировой практике открытых горных разработок одноковшовые экскаваторы с гидрофицированным рабочим оборудованием уверенно замещают механические лопаты. Это обусловлено расширенным диапазоном технологических возможностей карьерных гидравлических экскаваторов. При одинаковой массе с механическими лопатами гидравлические экскаваторы обеспечивают повышение усилия внедрения ковша на 65 – 70 %. За счет независимых приводов поворота ковша, рукояти и стрелы при работе гидравлического экскаватора может быть получена любая траектория движения режущей кромки рабочего органа в забое. Это позволяет более эффективно наполнять ковш, производить послойную разработку уступа и селективную выемку полезного ископаемого.
Выпускаются гидравлические прямые и обратные лопаты.
Таблица 6.1.
Техническая характеристика гидравлических экскаваторов АО «УЗТМ»
| Параметры | Марки экскаваторов | ||||||
| ЭГ-6 | ЭГ-10 | ЭГ-15 | ЭГ-20 | ЭГО-6 | ЭГО-8 | ЭГО-14 | |
| Вместимость ковша, м3 | |||||||
| Глубина черпания ниже уровня установки, м | 1,5 | 1,8 | |||||
| Высота черпания, м | 16,7 | ||||||
| Радиус черпания, м | 21,8 | ||||||
| Высота выгрузки, м | 14,8 | 12,5 | |||||
| Тип рабочего оборудования | Прямая лопата | Обратная лопата | |||||
| Масса, т |
За рубежом гидравлические экскаваторы выпускают фирмы ФРГ, Японии, США.
Таблица 6.2.
Техническая характеристика зарубежных гидравлических экскаваторов
| Показатели | Фирма - производитель | ||||
| Марка экскаватора | |||||
| KOMATSU | |||||
| РС 1800 | РС 3000 | РС 4000 | РС 5500 | РС 8000 | |
| Тип рабочего оборудования | Обратная лопата | Прямая лопата | |||
| Мощность двигателя, л.с. | 2х1260 | 2Х2010 | |||
| Масса, т | |||||
| Емкость ковша, м3 | 5,6 – 12,0 | ||||
| LIEBHERR | |||||
| R974B | R984B | R992 | R994 | R996 | |
| Мощность двигателя л.с. | |||||
| Тип рабочего оборудования | Прямая лопата | ||||
| Масса, т | 79,3 – 81,9 | 109,2 – 112,3 | 137,9 – 144,2 | ||
| Емкость ковша, м3 | 4,4 – 7,5 | 5,7 – 10,5 | 7,0 – 12,00 | 10,5 – 18,0 | 28,0 |
| Тип рабочего оборудования | Обратная лопата | ||||
| Масса, т | 74,3 – 82,1 | 104,2 – 112,4 | 135,2 – 140,4 | 214,0 | |
| Емкость ковша, м3 | 2,2 – 6,6 | 2,5 – 9,6 | 3,7 – 9.5 | 4,5 – 18,0 |
Оборудование прямой лопаты включает стрелу 1, рукоять 2, ковш 3 и гидроцилиндры 4, 5, 6 поворота ковша, поворота рукояти и подъема стрелы (см. рис.6.1.).
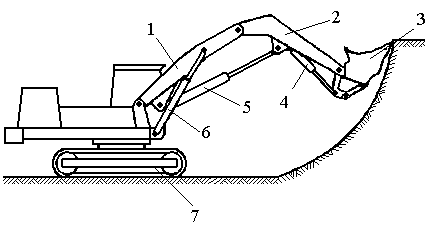
Рис.6.1. Прямая гидравлическая лопата
1 – стрела; 2 – рукоять; 3 – ковш; 4 - гидроцилиндр поворота ковша;
5 - гидроцилиндр поворота рукояти; 6 - гидроцилиндр поворота стрелы;
7 – гусеничный ход.
Копание осуществляется поворотом рукояти и ковша, движущегося от машины в сторону забоя. Толщину стружки регулируют подъемом или опусканием стрелы. При разгрузке ковшей малой емкости его поворачивают гидроцилиндром 4. На более мощных экскаваторах разгрузка ковша прямой лопаты производится открытием челюстного створа (см. рис. 6.2.).
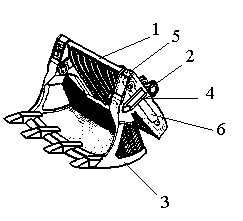
Рис. 6.2. Ковш прямой гидравлической лопаты
1 – задняя стенка; 2 – шарнир; 3 – челюсть; 4 – рычаг; 5 – шарнир;
6 – гидроцилиндр.
Челюстной ковш прямой гидравлической лопаты имеет заднюю стенку 1, соединенную шарнирами 2 с рукоятью. Челюсть 3 за рычаги 4 поворачивается относительно шарнира 5 с помощью двух гидроцилиндров 6, расположенных в отсеках задней стенки. При этом задняя стенка является неподвижным звеном.
Прямая лопата предназначена для выемки пород преимущественно выше уровня стояния машины. Глубина черпания ниже уровня установки не превышает 1,5 – 2 м (см. табл.6.1.).
В комплект рабочего оборудования обратной лопаты входят: стрела, рукоять, поворотный ковш, гидроцилиндры подъема стрелы, поворота рукояти и ковша.
Обратные гидравлические лопаты применяют в основном для разработки уступов ниже уровня стояния (см. рис.6.3.). Копание породы производят поворотом ковша относительно рукояти и поворотом рукояти относительно стрелы. Разгрузка ковша производится его поворотом гидроцилиндром 6 через двуплечий рычаг 7 и тягу 8.
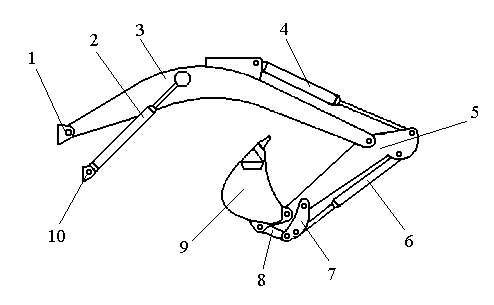
Рис. 6.3. Обратная гидравлическая лопата
1 – шарнир крепления стрелы к раме поворотной платформы;
2 – гидроцилиндр поворота стрелы; 3 – стрела; 4 - гидроцилиндр поворота рукояти; 5 – рукоять; 6 – гидроцилиндр поворота ковша;
7 – двуплечий рычаг; 8 – тяга; 9 – ковш; 10 – шарнир крепления гидроцилиндра к раме поворотной платформы.
Для передачи мощности от двигателя к рабочим механизмам используется гидравлический объемный привод, основным исполнительным механизмом которого является гидроцилиндр (см. рис.6.4.).
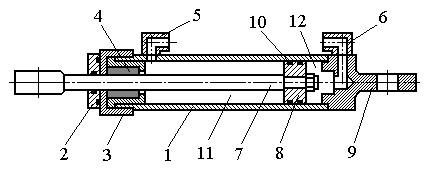
Рис. 6.4. Гидроцилиндр двустороннего действия
1 –корпус; 2 – крышка; 3 – стакан; 4 – втулка;
5, 6 – каналы для рабочей жидкости; 7 – шток; 8 – поршень; 9 – крышка;
10 - уплотнительное кольцо; 11 – штоковая полость; 12 – поршневая полость.
Шток 7 жестко соединен с поршнем 8. На наружной поверхности поршня в канавках установлены уплотнительные кольца 10. Свободный конец штока проходит через втулку 4, установленную в стакане 3, который обеспечивает центрирование штока относительно корпуса 1. Крышка 2 предотвращает попадание в корпус пыли и грязи. Рабочая жидкость подается в штоковую или поршневую полость. За счет давления рабочей жидкости на поршень происходит соответственно выдвижение штока 7 из корпуса 1 или его втягивание внутрь корпуса.
Дата добавления: 2017-02-13; просмотров: 3239;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
