Электроприводы с асинхронными фазными двигателями и торможением противовключением
Электроприводы с асинхронными фазными двигателями и торможением противовключением.Электроприводы с асинхронными фазными двигателями до последнего времени благодаря простоте реализации находят наиболее широкое применение для крановых электроприводов, особенно для механизмов передвижения. В механизмах подъема эти электроприводы все в большей степени вытесняются системами с динамическим торможением самовозбуждением. Комплектные электроприводы выполняют на основе применения асинхронных крановых двигателей с фазным ротором при управлении от силовых контроллеров ККТ60 и панелей управления ТА, ДТА, ТСА, К, ДК, КС.
Электроприводы с силовыми кулачковыми контроллерами и панелями ТА, ДТА (для механизмов передвижения) и ТСА (для механизмов подъема) с цепями управления на переменном токе применяют для кранов общего назначения, а с панелями К, ДК (передвижение) и КС (подъем) — с цепями управления на постоянном токе для кранов металлургического производства.
Особенности использования определяют и некоторые различия в построении указанных панелей. Панели К и КС имеют индивидуальную защиту, в то время как для панелей ТА и ТСА основной является схема с общей защитой, вынесенной на отдельную защитную панель, в панелях ДК для двух- и многодвигательных электроприводов предусмотрено разделение силовых цепей двигателей для повышения надежности работы системы, имеются также и другие различия.
Диапазон мощностей, охватываемый электроприводами и силовыми кулачковыми контроллерами, составляет от 1,7 до 30 кВт и увеличивается до 45 кВт при добавлении контакторного реверсора, а с панелями управления — от 3,5 до 100 кВт для механизмов передвижения и от 11 до 180 кВт для механизмов подъема (мощности указаны для режима работы 4М при ПВ=40%).
Применяемые в рассматриваемых электроприводах методы регулирования скорости и осуществления тормозных режимов определяют их невысокие регулировочные и энергетические свойства. Характерным для таких систем является отсутствие устойчивых посадочных и промежуточных скоростей и большие потери в пуско-тормозных резисторах. В целом диапазон регулирования этих электроприводов не превышает 3:1, а эквивалентный КПД для режима 4М составляет около 65 %.
Схемы электроприводов механизмов подъема. Схема электропривода с кулачковым контроллером ККТ61 приведена на рис. 1. Близка к ней по построению и схема электропривода с контроллером ККТ68, в которой в цепи статора применен контакторный реверсор, а освободившиеся контакты контроллера использованы для параллельного соединения сопротивлений в цепи ротора. Механические характеристики электропривода с кулачковыми контроллерами приведены на рис. 2 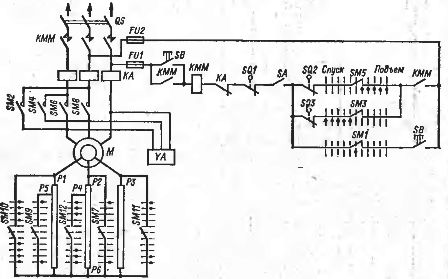
Рис. 1. Схема электропривода подъема с кулачковым контроллером ККТ61
При построении механических характеристик рассматриваемых электроприводов важным вопросом является выбор значения начального пускового момента (характеристики 1 и 1') С одной стороны, в плане снижения толчка момента при разгоне и обеспечения посадочных скоростей при спуске легких грузов желательно уменьшить пусковой момент. С другой стороны, чрезмерное снижение начального пускового момента может привести к опусканию тяжелых грузов на позициях подъема и возникновению чрезмерных скоростей при их спуске. Для исключения этого начальный пусковой момент должен составлять около 0,7Мном.
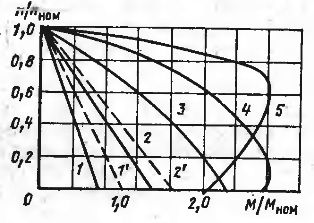 Рис. 2. Механические характеристики электропривода по схеме рис. 1
Рис. 2. Механические характеристики электропривода по схеме рис. 1
На рис. 2 в качестве номинального принят момент двигателя при ПВ = 40 %. Тогда в режиме ПВ = 25 % первой позиции контроллера будет соответствовать характеристика 1' с пусковым моментом, равным Мном при ПВ = 40 %. соответственно второй позиции — характеристика 2'. Для обеспечения этого пускорегулирующие резисторы имеют отпайки, позволяющие шунтировать часть сопротивления последней ступени.
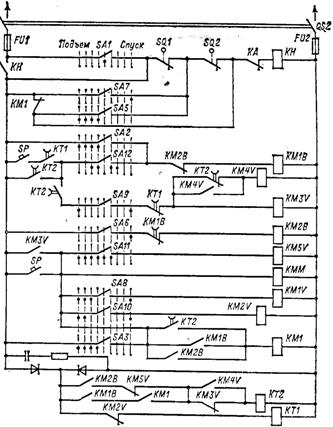
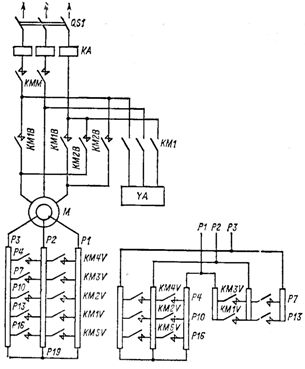
Рис. 3. Схема электропривода подъема с панелью ТСА.
На схеме рис. 1 контакты SM2, SM4, SM6 и SM8 контроллера выполняют реверс двигателя, контакты SM7 и SM9 — SM12 коммутируют ступени резисторов, контакты SM1, SM3 и SM5 использованы в цепях защиты. Одновременно с двигателем включается катушка тормоза YA. В схеме с контроллером ККТ61 в целях уменьшения числа используемых кулачков применено несимметричное включение сопротивлений, а в схеме с ККТ68 число контактов контроллера позволяет выполнить симметричное включение.
Защита электропривода осуществляется защитной панелью, на которой находятся линейный контактор КММ, силовой рубильник QS, предохранители FU1, FU2 и блок максимальных реле КА. Конечная защита осуществляется выключателями SQ2 и SQ3. В цепь катушки контактора КММ включены контакты кнопки включения SB, аварийного выключателя SA и контакты блокировки люка SQL.
На рис. 3 приведена схема электропривода подъема с панелью управления ТСА. По тем же принципам строятся электроприводы и с панелями КС. Отличия заключаются в том, что в них цепь Управления выполнена на постоянном токе, а защитные аппараты, включая линейный контактор КММ, рубильник QS1, максимальные реле КА, предохранители FU1 и FU2 находятся непосредственно на панели, и защита является индивидуальной, а в электроприводах с панелями ТСА используется защитная панель.
Следует отметить, что для ответственных электроприводов также выпускалась модификация панелей с управлением на переменном токе типа ТСАЗ. Схемы электропривода с панелями управления обеспечивают автоматический пуск, реверсирование, торможение и ступенчатое регулирование скорости на реостатных характеристиках двигателя.
На схеме рис. 3 приняты обозначения: КММ — линейный контактор; КМ1В и КМ2В — контакторы направления; КМ1 — контактор тормоза YA; KM1V — KM4V — контакторы ускорения; KM5V—контактор противовключения. Защита воздействует на реле КН.
Механические характеристики электропривода приведены на рис. 4. На позициях подъема пуск осуществляется под контролем реле времени КТ1 и КТ2, при этом характеристика 4'П является нефиксированной. На положениях спуска производится регулирование на характеристиках противовключения 1С и 2С и характеристике ЗС, на которой в зависимости от массы груза двигатель работает в режиме или силового спуска или генераторного торможения. Переход на характеристику ЗС осуществляется по характеристикам З'С и 3"С под контролем реле времени.
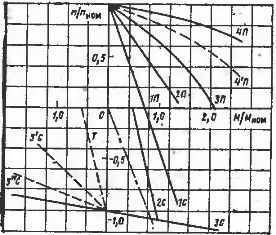
Рис. 4. Механические характеристики электропривода по схеме рис. 3.
В схемах панелей, выпускавшихся до 1979 г., для опускания малых грузов применялся режим однофазного торможения, осуществляемый с помощью дополнительных контакторов. Этому режиму на рис. 4 соответствует характеристика О. После освоения панелей с динамическим торможением, рассматриваемых далее, этот режим в панелях ТСА и КС был исключен. Для спуска груза на характеристиках противовключения 1С и 2С оператор должен нажать педаль SP при установке рукоятки командоконтроллера на соответствующую позицию. Управление педалью является вынужденным при мягких механических характеристиках из-за возможности подъема груза вместо спуска.
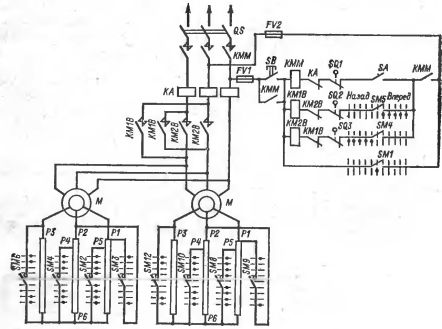
Рис. 5. Схема двухдвигательного электропривода механизма передвижении с кулачковым контроллером ККТ62
Электропривод переводится в режим противовключения не только при опускании грузов, но и при торможении с положений спуска, причем на первой и второй позициях это осуществляется нажатием педали. При этом за время выдержки реле КТ2 наряду с механическим торможением обеспечивается и электрическое на характеристике 2С. Помимо указанного реле КТ2 контролирует также правильность сборки схемы. В схеме панелей ТСА катушка тормоза YA через контактор КМ1 подключена к сети переменного тока. В панелях КС могут использоваться тормозные магниты как переменного, так и постоянного тока. В последнем случае выполняется форсировка включения тормоза, как это показано ниже при рассмотрении панелей ДК.
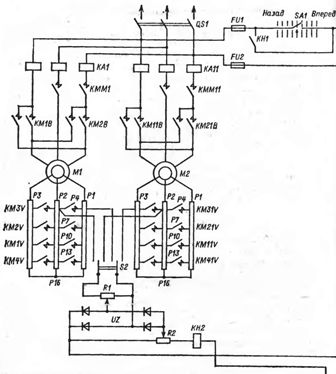
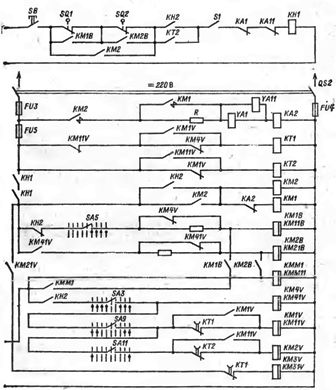
Рис. 6. Схема двухдвигательного электропривода механизма передвижения с панелью ДК
На схеме рис. 3 наряду с обычным включением резисторов показано также их параллельное включение, применяемое в тех случаях, когда нагрузка превышает допустимую для контакторов ротора.
Схемы электроприводов механизмов передвижения. Схемы электроприводов механизмов передвижения с кулачковыми контроллерами выполняются в одно- или двухдвигательном исполнении. Схема однодвигательного исполнения с контроллером ККТ61 полностью аналогична схеме рис. 1. Схема двухдвигательного электропривода с контроллером ККТ62 приведена на рис. 5.
Принципы работы схем с контроллерами KKT6I и ККТ62 одинаковы: контакты SM контроллера регулируют сопротивления в цепи роторов двигателей, защита вынесена на отдельную защитную панель. Отличие состоит в том, что в схеме с ККТ62 реверс осуществляется контакторами KM1B и КМ2В. Механические характеристики обоих электроприводов идентичны и приведены на рис. 2.
Схема электропривода механизма передвижения с управлением от панели рассматривается на примере двухдвигательного электропривода с панелью ДК краново-металлургического исполнения, приведенной на рис. 6. Схема обеспечивает симметричные механические характеристики, приведенные на рис. 7. В схеме: KMM1 и KMMU11 — линейные контакторы; КМ1В, КМ11В, КМ2В, КМ21В — контакторы направления; KM1V — KM4V, KM11V— KM41V — контакторы ускорения; КМ1, КМ2 — контакторы тормозов YA1 и YA11. Управление осуществляется от командоконтроллера (контакты SA1— SA11) с обеспечением плавного пуска под контролем реле времени КТ1 и КТ2.
Для торможения используется режим противовключения на характеристике 1, осуществляемый под контролем реле КН2. Катушка реле КН2 включена на разность напряжений, пропорциональных выпрямленному диодным мостом UZ напряжению ротора одного из двигателей, и опорного напряжения сети. Регулированием потенциометров R1 и R2 достигается задержка двигателя на характеристике 1 до нулевой скорости, после чего разрешается пуск двигателя в обратном направлении. В схеме предусмотрены все необходимые виды защиты, вынесенные на реле напряжения КН1. Цепь управления питается от сети постоянного тока 220 В через переключатель QS2 и предохранители FU8 — FU4.
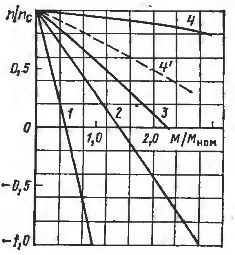
Рис. 7. Механические характеристики электропривода по схеме рис. 6
Технические данные комплектных электроприводов. Технические данные электроприводов механизмов подъема и передвижения представлены в справочных таблицах. Указанными таблицами определяются мощности нагрузок двигателей, управляемых от силовых контроллеров и панелей в зависимости от режима работы. Технические данные в таблицах относятся к двигателям и панелям управления с номинальным напряжением питающей сети 380 В.
При других напряжениях необходимо пользоваться информационными материалами завода-изготовителя. Для дуплексных панелей указанные в таблицах мощности двигателей удваиваются. Панели ТСА3400 и КС400 в настоящее время не выпускаются, но в эксплуатации еще находятся электроприводы с этими панелями. Для режима работы 6М следует применять только панели К, ДК и КС.
| <== предыдущая лекция | | | следующая лекция ==> |
| Экономика: наука и хозяйство. Роль экономики в жизни общества | | | Электропроводность диэлектриков |
Дата добавления: 2017-01-08; просмотров: 2872;
Поиск по сайту
Узнать еще
- АЭП с синхронными и вентильными двигателями
- Двигателями постоянного тока.
- Дифференциальные реле с торможением
- Контакторное управление асинхронными
- Методы снижения выбросов окислов азота газотурбинными двигателями
- НАДЗОР И УХОД ЗА ДВИГАТЕЛЯМИ
- Назовите агрегат, обеспечивающий независимость управления от ручки “шаг–газ” и рычагов раздельного управления двигателями (РРУД).
- ОПИСАНИЕ ТОРМОЗНОЙ СИСТЕМЫ С РАЗДЕЛЬНЫМ ТОРМОЖЕНИЕМ ТЕЛЕЖЕК И НОВЫМ ТОРМОЗНЫМ ОБОРУДОВАНИЕМ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
