Реакторы для вентильного электропривода
В вентильном электроприводе реакторы выполняют следующие функции:
ограничивают скорость нарастания и величину аварийного тока через тиристор;
уменьшают зону прерывистых токов;
сглаживают пульсации выпрямленного тока.
В реверсивном вентильном электроприводе на реакторы может возлагаться функция ограничения уравнительных токов при совместном управлении вентильными группами.
Кроме того, в вентильном электроприводе реакторы могут выполнять дополнительные функции:
ограничение скорости нарастания аварийного тока при открывании инвертора;
ограничение тока через вентили в первый полупериод питающего напряжения при коротком замыкании на стороне выпрямленного тока.
Индуктивность реактора зависит от его назначения, силовой схемы преобразователя и расположения реакторов в схеме.
Выбор анодных реакторов.При бестрансформаторном исполнении преобразователя на стороне переменного тока включают реакторы, предназначенные для ограничения скорости нарастания и величины аварийного тока через тиристоры. Реакторы не должны уменьшать свою индуктивность при токах короткого замыкания [6], поэтому они выполняются воздушными без железного сердечника.
Величину индуктивности токоограничивающего реактора можно приближенно определить из выражения
 , (2.23)
, (2.23)
где  – коэффициент запаса превышения допустимого ударного тока;
– коэффициент запаса превышения допустимого ударного тока;  – допустимый ударный ток тиристора согласно справочных данных, А.
– допустимый ударный ток тиристора согласно справочных данных, А.
Реактор выбирают на напряжение питающей сети  и рассчитанный ток вторичной цепи
и рассчитанный ток вторичной цепи  по формуле (2.12):
по формуле (2.12):


 . (2.24)
. (2.24)
Расчет и выбор уравнительных реакторов.Уравнительные реакторы применяются только для реверсивных схем тиристорных преобразователей при совместном способе управления выпрямительной и инверторной группами вентилей для ограничения значения уравнительного тока. Подробное описание схем, режимов работы реверсивных тиристорных преобразователей и способов управления изложено в [1, 2, 4-6].
При совместном согласованном управлении вентильными комплектами требуемую индуктивность уравнительного контура определяют исходя из ограничения действующего значения уравнительного тока Iур до 5–10 % от Iдв.ном, т. е.
 , (2.25)
, (2.25)
где  – амплитудное значение фазного напряжения вторичной обмотки силового трансформатора для нулевых схем выпрямления;
– амплитудное значение фазного напряжения вторичной обмотки силового трансформатора для нулевых схем выпрямления;  – амплитудное значение линейного напряжения вторичных обмоток силового трансформатора для мостовых схем;
– амплитудное значение линейного напряжения вторичных обмоток силового трансформатора для мостовых схем;  – угловая частота питающей сети;
– угловая частота питающей сети;  – принятое минимальное значение уравнительного тока;
– принятое минимальное значение уравнительного тока;  – коэффициент, характеризующий действующее значение уравнительного тока (определяется в зависимости от угла управления
– коэффициент, характеризующий действующее значение уравнительного тока (определяется в зависимости от угла управления  и схемы реверсивного выпрямителя, при согласованном управлении наибольшего значения
и схемы реверсивного выпрямителя, при согласованном управлении наибольшего значения  достигает при
достигает при  и составляет для трехфазной нулевой и трехфазной мостовой встречно-параллельной схемы
и составляет для трехфазной нулевой и трехфазной мостовой встречно-параллельной схемы  ; для трехфазной мостовой перекрестной и шестифазной нулевой
; для трехфазной мостовой перекрестной и шестифазной нулевой  ) [5].
) [5].
Индуктивность уравнительных реакторов, необходимая для ограничения уравнительного тока на заданном уровне:
 . (2.26)
. (2.26)
Токоограничивающие реакторы включают в контр уравнительного тока по одному или по два на группу (рис. 2.2). Уравнительные реакторы могут выполняться ненасыщающимися (с воздушным зазором) насыщающимися
и частично насыщающимися.
При использовании ненасыщающихся уравнительных реакторов в схемах выпрямителей (рис. 2.2, а, б) устанавливают два одинаковых уравнительных реактора (по одному на каждое направление тока двигателя), индуктивность каждого из которых выбирают равной
 . (2.27)
. (2.27)
С целью уменьшения габаритов уравнительных реакторов их выполняют частично либо полностью насыщающимися. Индуктивность каждого полностью насыщающегося уравнительного реактора, по которому течет рабочий ток реактора, равна практически нулю (уравнительный реактор в режиме насыщения), а все напряжение  прикладывается ко второму уравнительному реактору (рис. 2.2, в), следовательно, ограничение будет осуществляться вторым уравнительным реактором:
прикладывается ко второму уравнительному реактору (рис. 2.2, в), следовательно, ограничение будет осуществляться вторым уравнительным реактором:
 . (2.28)
. (2.28)
Для частично насыщающихся уравнительных реакторов индуктивность каждого выбирают равной
 . (2.29)
. (2.29)
Для снижения габаритов уравнительных реакторов можно использовать два способа:
применять несогласованное управление группами вентилей преобразователя;
увеличивать принимаемое значение уравнительного тока до 0,2Id
в случае достаточного запаса по току тиристоров.
При раздельном управлении комплектами вентилей преобразователя уравнительный реактор не используется.
Ток, протекающий через уравнительный реактор, равен сумме токов нагрузки и уравнительного тока
 . (2.30)
. (2.30)
Уравнительные реакторы выбирают по требуемым значениям индуктивности и тока:
 , (2.31)
, (2.31)
где  и
и  – номинальные индуктивность и ток реактора.
– номинальные индуктивность и ток реактора.
Реактор для ограничения зоны прерывистых токов.Для получения гранично-непрерывного режима при заданном максимальном значении угла регулирования  в цепь выпрямленного тока необходимо включить индуктивность
в цепь выпрямленного тока необходимо включить индуктивность  , значение которой можно определить исходя из требуемой индуктивности
, значение которой можно определить исходя из требуемой индуктивности
 , (2.32)
, (2.32)
где  – требуемый непрерывный минимальный ток двигателя, обычно Id гр=0,1Id ном.;
– требуемый непрерывный минимальный ток двигателя, обычно Id гр=0,1Id ном.;  – число пульсаций выпрямленного напряжения за период напряжения питающей сети.
– число пульсаций выпрямленного напряжения за период напряжения питающей сети.
Максимальное значение угла управления исходя из требований обеспечения минимальной угловой скорости:
 . (2.33)
. (2.33)
Минимальное значение ЭДС преобразователя, соответствующее значению при  :
:
 , (2.34)
, (2.34)
где  – минимальная угловая скорость двигателя, с–1; Д – диапазон регулирования угловой скорости двигателя;
– минимальная угловая скорость двигателя, с–1; Д – диапазон регулирования угловой скорости двигателя;  . – активное сопротивление шунта и его коэффициент передачи (
. – активное сопротивление шунта и его коэффициент передачи (  ), Ом;
), Ом;  – падение напряжения на шунте при токе
– падение напряжения на шунте при токе  ., обычно
., обычно  ; Iш.ном – номинальный ток шунта, А;
; Iш.ном – номинальный ток шунта, А;  – активное сопротивление реакторов в якорной цепи, Ом. Если реактор еще не выбран, то его активное сопротивление можно определить приближенно по формуле
– активное сопротивление реакторов в якорной цепи, Ом. Если реактор еще не выбран, то его активное сопротивление можно определить приближенно по формуле
 . (2.35)
. (2.35)
После выбора реактора из ряда стандартных следует уточнить его активное сопротивление и пересчитать угол управления .
Необходимая индуктивность ограничивающего реактора, Гн:
 . (2.36)
. (2.36)
При бестрансформаторном преобразователе вместо индуктивности силового трансформатора , приведенной к цепи выпрямленного тока, используется индуктивность анодного реактора  . Индуктивность уравнительного реактора
. Индуктивность уравнительного реактора  – учитывается только в реверсивных схемах с совместным управлением группами тиристоров. Если
– учитывается только в реверсивных схемах с совместным управлением группами тиристоров. Если  , то реактор в системе электропривода не нужен.
, то реактор в системе электропривода не нужен.
Реактор, ограничивающий зону прерывистых токов, выбирают по требуемым значениям:
 . (2.37)
. (2.37)
Расчет индуктивности и выбор сглаживающего реактора.Пульсации выпрямленного напряжения приводят к пульсациям выпрямленного тока, которые ухудшают коммутацию двигателя и увеличивают его нагрев. Величина пульсации тока зависит от схемы выпрямления, угла управления и индуктивности контура нагрузки. Амплитудные значения гармонических составляющих выпрямленной ЭДС  связаны с его средним значением
связаны с его средним значением  и углом регулирования преобразователя
и углом регулирования преобразователя  следующим выражением:
следующим выражением:
 , (2.38)
, (2.38)
где – число пульсаций выпрямленной ЭДС для первой гармоники за период напряжения питающей сети (для трехфазной нулевой схемы  , для трехфазной мостовой схемы
, для трехфазной мостовой схемы  );
);  – кратность гармоники.
– кратность гармоники.
Амплитуды гармоник более высокой кратности значительно меньше, а действие реактора на них эффективнее, поэтому расчет индуктивности дросселя ведется только по основной гармонике. Относительная величина действующего значения первой гармоники  согласно формуле (2.38):
согласно формуле (2.38):
 , (2.39)
, (2.39)
где – максимальный угол управления преобразователя, рассчитанный для минимальной угловой частоты вращения двигателя.
Действующее значение основной гармоники должно быть [6] в пределах 2–15 % номинального тока в зависимости от мощности, диапазона регулирования угловой частоты вращения двигателя и допустимого снижения зоны темной коммутации. Обычно для компенсированных электродвигателей допустимый уровень пульсации тока якоря iп составляет 2 % от номинального, для некомпенсированных – 5–7 %, для машин малой мощности – до 15 %.
При известном амплитудном значении основной гармоники  и допустимому действующему значению основной гармоники тока
и допустимому действующему значению основной гармоники тока  необходимая индуктивность цепи выпрямленного тока может быть определена по формуле, Гн:
необходимая индуктивность цепи выпрямленного тока может быть определена по формуле, Гн:
 . (2.40)
. (2.40)
Требуемая индуктивность сглаживающего реактора, Гн:
 , (2.41)
, (2.41)
где – индуктивность уравнительного реактора, учитывается только для реверсивных схем преобразователя с совместным управлением группами тиристоров.
Если  , то сглаживающий реактор не нужен.
, то сглаживающий реактор не нужен.
Сглаживающий реактор выбирают по требуемым значениям индуктивности и тока:
 . (2.42)
. (2.42)
Окончательный выбор реакторов на стороне выпрямленного тока производят по максимальной величине  или
или  .
.
2.3. Определение расчетных параметров силовой цепи
«тиристорный преобразователь – двигатель»
Расчетное сопротивление якорной цепи системы ТП – ДПТ, Ом,
 , (2.43)
, (2.43)
где  – активное сопротивление якорной цепи двигателя (2.1);
– активное сопротивление якорной цепи двигателя (2.1);  – активное сопротивление преобразователя (2.22);
– активное сопротивление преобразователя (2.22);  – активное сопротивление токового шунта (2.34);
– активное сопротивление токового шунта (2.34);  – активные сопротивления уравнительного (при его наличии) и сглаживающего реакторов.
– активные сопротивления уравнительного (при его наличии) и сглаживающего реакторов.
Активные сопротивления реакторов могут быть определены через потери в меди обмотки реактора от номинального тока реактора, т. е.  . При отсутствии паспортных данных на реактор можно приближенно принять по формуле (2.35) или
. При отсутствии паспортных данных на реактор можно приближенно принять по формуле (2.35) или
 . (2.44)
. (2.44)
Расчетная индуктивность якорной цепи системы ТП – Д, Гн:
 , (2.45)
, (2.45)
где  – индуктивность якорной цепи двигателя (2.3);
– индуктивность якорной цепи двигателя (2.3);  – индуктивность трансформатора (2.17);
– индуктивность трансформатора (2.17);  – индуктивность уравнительного (2.31) и сглаживающего (2.42) реакторов.
– индуктивность уравнительного (2.31) и сглаживающего (2.42) реакторов.
После определения параметров силовой цепи системы ТП – Д необходимо проверить правильность предварительного расчета фазной ЭДС вторичной обмотки трансформатора  с учетом полученных значений сопротивлений элементов силовой цепи. То есть необходимо оценить, обеспечивает ли выбранный трансформатор требуемый режим привода при максимальной скорости
с учетом полученных значений сопротивлений элементов силовой цепи. То есть необходимо оценить, обеспечивает ли выбранный трансформатор требуемый режим привода при максимальной скорости  и максимальном токе якоря, равным току отсечки
и максимальном токе якоря, равным току отсечки  .
.
Такую оценку можно произвести на основе уравнения для якорной цепи двигателя:
 , (2.46)
, (2.46)
где  для нереверсивного привода и
для нереверсивного привода и  для реверсивного; Rя.ц – определено выражением (2.43); KU – приведены в табл. 2.1.
для реверсивного; Rя.ц – определено выражением (2.43); KU – приведены в табл. 2.1.
Из формулы (2.46) определим
 . (2.47)
. (2.47)
Если  , то выбранный трансформатор обеспечивает максимальный режим работы электропривода. В противном случае следует выбрать другой трансформатор повышенной мощности и повторить необходимые расчеты.
, то выбранный трансформатор обеспечивает максимальный режим работы электропривода. В противном случае следует выбрать другой трансформатор повышенной мощности и повторить необходимые расчеты.
3. РАСЧЕТ СТАТИЧЕСКИХ
И ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
В РАЗОМКНУТОЙ СИСТЕМЕ ТП – Д
3.1. Расчет регулировочных характеристик
тиристорного преобразователя
Функциональная схема тиристорного преобразователя изображена на рис. 3.1.
ТП включает в себя управляемый выпрямитель UZ, систему импульсно-фазового управления (СИФУ) UA, силовой трансформатор Т (возможно и бестрансформаторное питание), УР и СР, представленные одной индуктивностью L.
Рис. 3.1. Функциональная схема тиристорного преобразователя
Входным сигналом ТП является [7] напряжение управления  , а выходным – ЭДС преобразователя
, а выходным – ЭДС преобразователя  . Регулировочная характеристика ТП представляет собой зависимость
. Регулировочная характеристика ТП представляет собой зависимость  , которую можно представить в виде
, которую можно представить в виде
 , (3.1)
, (3.1)
где  – коэффициент усиления ТП, в общем случае величина нелинейная
– коэффициент усиления ТП, в общем случае величина нелинейная  .
.
Зависимость определяется формой опорного напряжения СИФУ. Регулировочную характеристику ТП для схем, приведенных
в табл. 2.1, рассчитывают для режима непрерывных токов по [7, 8]:
 , (3.2)
, (3.2)
где  – максимальное значение ЭДС преобразователя при угле регулирования
– максимальное значение ЭДС преобразователя при угле регулирования  .
.
В соответствии с табл. 2.1
 , (3.3)
, (3.3)
где – действующее значение вторичной фазной ЭДС трансформатора.
Закон изменения угла от зависит от формы опорного напряжения СИФУ. Наибольшее распространение получили СИФУ с косинусоидальным и пилообразным опорными напряжениями.
Рис. 3.2. Формирование импульсов в СИФУ с опорным напряжением в виде пилы
Рис. 3.3. Формирование импульсов в СИФУ с опорным напряжением в виде косинусоиды
На рис. 3.2 и 3.3 показан процесс напряжения на аноде  соответствующего тиристора. Для реверсивных ТП
соответствующего тиристора. Для реверсивных ТП  знакопеременное и, соответственно, рабочим участком является как положительная, так и отрицательная часть
знакопеременное и, соответственно, рабочим участком является как положительная, так и отрицательная часть  .
.
Для пилообразного (рис. 3.2) справедливо
 , (3.4)
, (3.4)
откуда
 . (3.5)
. (3.5)
Аналогично для косинусоидального (рис. 3.3):
 , (3.6)
, (3.6)
тогда
 . (3.7)
. (3.7)
Таким образом, при пилообразной форме регулировочная характеристика ТП нелинейная и имеет вид, изображенный на рис. 3.4. Для косинусоидального регулировочная характеристика носит линейный характер и  не зависит от (рис. 3.5).
не зависит от (рис. 3.5).
Рис. 3.4. Регулировочные характеристики тиристорного преобразователя
с пилообразным опорным напряжением
Зависимость от напряжения в случае пилообразного является недостатком такого типа СИФУ, поэтому при необходимости линеаризуют зависимость включением на входе СИФУ усилителя с нелинейной
амплитудной характеристикой вида  . В этом случае
. В этом случае
регулировочные характеристики ТП будут совпадать с характеристиками,
показанными на рис. 3.5.
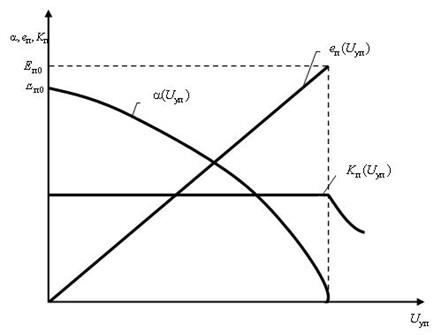
Рис. 3.5. Регулировочные характеристики тиристорного преобразователя
с синусоидальным опорным напряжением
В наиболее качественных СИФУ используются косинусоидальные опорные напряжения.
Дата добавления: 2016-12-27; просмотров: 5781;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- Andante cantabile con espressione В. Моцарт. Соната для ф-п. № 8, ч. II
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Audit Trail - Материалы для проведения аудиторской проверки
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- I.10. Тесты для контроля знаний
- III. Порошки для стирки и мытья
- III. ТИТАН – МАТЕРИАЛ ДЛЯ СОВРЕМЕННОЙ СТОМАТОЛОГИИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
