ЭТАПЫ АВТОМАТИЧЕСКОЙ СБОРКИ
Автоматическую сборку можно разделить на ряд последовательных этапов:
- подача предварительно ориентированных деталей в рабочую зону сборочного автомата;
- ориентирование присоединяемой детали относительно базовой;
- присоединение и закрепление детали;
- освобождение рабочей зоны сборочного автомата от собранной сборочной единицы.
Из рассмотренных этапов первый и четвертый являются транспортными. Требования к точности относительного положения деталей на этих этапах сравнительно невелики. Соединение деталей в сборочную единицу осуществляется на втором и третьем этапах. На этих этапах требуется обеспечить более точное относительное положение деталей.
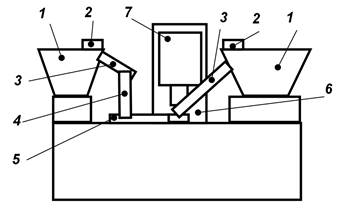
Рис.1. Пример компоновки однопозиционного сборочного автомата: 1 – вибробункер для хранения и подачи собираемых деталей; 2 – ориентирующие устройства; 3 – лоток; 4 – магазин; 5 – питатель; 6 – отсекатель; 7 – силовая головка.
Способы и средства автоматической подачи заготовок и деталей к сборочному оборудованиюаналогичны способам и средствам подачи заготовок деталей, режущих инструментов, приспособлений, спутников с заготовками и т.д. к станкам и другому автоматизированному оборудованию.
На автоматическую сборку или дальнейшую обработку детали и заготовки могут подаваться поштучно и партиями в ориентированном или дезориентированном положении.
Ориентированным считается определенное одинаковое положение всех деталей, например всех валиков в горизонтальном или вертикальном положении.
Дезориентированным считается случайное, хаотичное положение деталей, например валиков, ссыпанных в бункер. Каждый валик (в бункере) ориентирован в пространстве случайным образом.
При обработке на станках заготовки ориентированы определенным образом относительно приспособления, шпинделя, инструмента, т.е. после выполнения последней операции технологического процесса обработки заготовки, после которой детали подаются на сборку. Ориентированное положение деталей после последней операции целесообразно сохранить при транспортировании на сборку, поскольку детали должны поступать к рабочим органам сборочного автомата в предварительно ориентированном положении. Если же после изготовления деталей их ориентация будет нарушена, то на сборке детали снова понадобится ориентировать, на что необходимо будет затратить дополнительное время и средства. Вместе с тем, сохранение ориентированного положения деталей при транспортировании их на сборку также требует специальных средств. Поэтому целесообразность ориентированного или неориентированного транспортирования деталей определяется в итоге стоимостью варианта.
Схемы подачи деталей показаны на рис. 3.
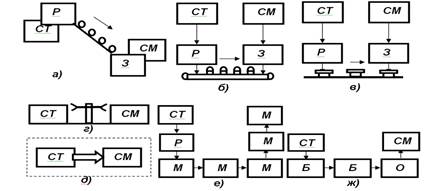
Рис.3. Схемы автоматизированного транспортирования: Б – бункер; О – ориентирующее устройство; М – магазин, СТ – станок, СМ – сборочная машина, Р – разгрузочное устройство, З –загрузочное устройство
Поштучно передаются, как правило, крупные детали в ориентированном положении, а также средние и мелкие детали, если расстояние между последним станком и сборочной позицией невелико (рис. 3, а, г, д).
Так, например, средние и мелкие детали могут быть поданы от станка СТ к сборочной машине СМ по наклонному лотку (см. рис. 3, а), промышленным роботом (см. рис. 3, г) или другим транспортным устройством, например поворотным столом многопозиционного сборочного автомата (см. рис. 3, д), на котором может осуществляться и изготовление некоторых деталей, например пружин. Во всех этих случаях ориентированная деталь со станка без потери ориентации либо подается на транспортную систему разгрузочным устройством Р, либо непосредственно переносится на сборочную позицию. При этом детали могут быть ориентированы иначе, чем на станке; валы, например, могут находиться на станке в горизонтальном положении, а транспортироваться роботом или устанавливаться в кассету в вертикальном положении. Управляемое изменение положения деталей в пространстве не означает потери ориентации. Деталь, например, зажатая в захвате робота, может перемещаться им по различным запрограммированным траекториям, но это не имеет ничего общего с потерей ориентации и занятием произвольного случайного положения, как, например, тогда, когда детали скатываются в ящик, бункер или другую тару, где располагаются хаотически.
На рис. 3, б показана схема транспортирования деталей каким-либо конвейером, оснащенным базирующими элементами, например призмами, которые позволяют транспортирующим системам сохранить положение деталей при транспортировании к сборочной машине или к другому станку. Поштучная перевозка деталей может осуществляться транспортной тележкой (см. рис. 3, в) рельсовой или безрельсовой. У сборочной машины деталь перегружается с конвейера или тележки загрузочным устройством 3, в качестве которого может использоваться робот или манипулятор. Поштучное транспортирование деталей на короткое расстояние может осуществляться роботом или напольным или портальным манипулятором (см. рис. 3, г).
Иногда сборочная позиция и позиция обработки заготовки могут быть объединены в одном автомате (см. рис. 3, д). Тогда перенос детали с одной позиции на другую может осуществляться тактовым поворотным столом, роботом, манипулятором.
Очевидное преимущество указанных способов состоит в сохранении ориентированного, упорядоченного положения детали, которое она занимает на станке, и отсутствии необходимости в её повторной ориентации у сборочного автомата.
Это важное преимущество может быть обеспечено и при транспортировании деталей партиями по несколько штук, в магазинах, кассетах, паллетах и другой транспортной таре, обеспечивающей сохранение ориентации деталей при транспортировании (рис. 3, е). Тара может быть специальной, рассчитанной только на определенный вид заготовки или детали, универсальной для транспортирования изделий различных наименований без переналадки, а также переналаживаемой – для транспортирования различных изделий.
Характерной особенностью кассеты для автоматизированного производства является наличие:
- постоянных основных баз для точной установки кассеты около станка или сборочной машины;
- определенного нормированного расстояния между комплектами вспомогательных баз, ориентирующих детали во всех кассетах;
- определенных размеров Ах, Бу с допусками, определяющих положение вспомогательных баз относительно основных баз кассет. Это необходимо для автоматической загрузки и разгрузки тары с помощью манипуляторов или роботов. Робот может брать детали, находящиеся в определенном положении в ячейках кассеты в заранее известных координатах пространства, закодированных в управляющей программе.
Транспортирование магазинов, паллет и кассет может осуществляться теми же средствами, что применяются при транспортировании единичных деталей (конвейерами, тележками и т.п.), включая транспортирование мелких кассет роботом. Транспортирование деталей в кассетах, магазинах может осуществляться не только в пределах цеха, завода, но и между заводами.
Заготовки и некоторые изделия могут транспортироваться в неупорядоченном положении в соответствующей таре. Ориентированная на станке заготовка или деталь, попадая в этот ящик, теряет ориентацию и для последующей сборки или продолжения обработки должна быть снова ориентирована с помощью ориентирующего устройства.
Хранение или транспортирование неориентированных заготовок и деталей проще (см. рис. 3, ж), поскольку не требует применения специальных магазинов или кассет, а также упорядоченной укладки деталей. Вместе с тем, неупорядоченному хранению и транспортированию деталей в ящиках и бункерах присущи существенные недостатки, основные из которых следующие: детали могут быть повреждены в результате постоянных соударений друг о друга и о стенки тары при разгрузке, транспортировании в неупорядоченном состоянии и при пересыпании из тары в бункер ориентирующего устройства; некоторые детали могут сцепиться друг с другом, что затрудняет последующее их транспортирование (гроверные шайбы или пружины).
Для автоматической подачи в рабочую зону сборочного автомата детали должны быть ориентированы требуемым образом, для чего необходимы специальные ориентирующие устройства.
Подача ориентированных заготовок и деталей. Для подачи заготовок и деталей из магазинов, кассет, лент к сборочным, обрабатывающим или другим системам используют разнообразные устройства, отличающиеся в том числе степенью универсальности и гибкости.
Промышленный робот - наиболее гибкое устройство. ПР, например, может по очереди брать заготовки в заданном программой порядке из ячеек кассеты и устанавливать их в патрон станка для обработки, а после обработки снова ставить в кассету на свободное место и так до тех пор, пока все заготовки не будут обработаны. Смена программы и захвата на многих современных роботах может осуществляться автоматически.
Автоматические манипуляторы имеют постоянную программу работы, поэтому манипулятор может брать деталь или заготовку только в одном определенном месте, на которое он настроен. Чтобы манипулятор мог брать детали из ячеек кассеты, необходимо дополнительное устройство - тактовый стол, который должен перемещать кассету с деталями так, чтобы они оказывались по очереди в зоне захвата манипулятором.
В массовом и крупносерийном производстве манипуляторы при простых программах перемещений, характерных для загрузки оборудования, более предпочтительны, чем роботы, поскольку значительно дешевле и проще в обслуживании. В комплекте с манипуляторами могут использоваться не только тактовые столы, но и вибробункеры с ориентирующими устройствами, магазины с отсекателями. Роботы и манипуляторы могут быть использованы как универсальное оборудование для подачи различных деталей с допустимыми массой, размерами в пределах обслуживаемой зоны.
В отличие от роботов и манипуляторов специальные устройства для подачи ориентированных деталей, как правило, создаются для подачи деталей только конкретного типа или нескольких близких по форме деталей в условиях массового и крупносерийного производств.
Подача неориентированных заготовок и деталей. Устройства для подачи заготовок или деталей, расположенных хаотично, содержат обычно бункеры, подающие механизмы, ориентирующие устройства. На выходе подающего устройства детали принимают требуемое для дальнейшей работы определенное пространственное положение. К устройствам для подачи деталей из неориентированного положения относятся вибробункеры различного исполнения, скребковые бункеры, бункеры с ножевыми захватами и др.
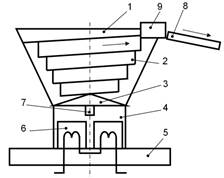
Рис.4. Вибробункер с электромагнитным вибратором
Основной частью вибробункера является бункерная чаша 1, которая имеет конусную форму. Внутренняя поверхность чаши имеет спиральный выступ 2 такой ширины, чтобы подаваемые детали в каком-либо одном или нескольких положениях могли подниматься по спиральному выступу со дна чаши вверх. Внизу в чаше установлен конус 3, обеспечивающий подачу засыпанных деталей к периферии чаши. Чаша вибробункера установлена на пружинных подвесках 4 на основании 5 и совершает крутильные колебания. Вибрация чаши создается механически либо с помощью асинхронного электродвигателя, на валу которого установлен эксцентрик, либо с помощью электромагнита. Электромагнит 6 периодически притягивает якорь 7, прикрепленный к периферии чаши. В результате бункер совершает колебания, амплитуда которых может составлять доли миллиметра. В чашу бункера засыпают детали или заготовки, которые требуется подать в ориентированном виде к лотку 8. На выходе бункера перед лотком 8, как правило, устанавливают ориентирующее устройство 9, которое пропускает в лоток 8 только детали, ориентированные на спиральном выступе в строго определенном положении. Детали, оказавшиеся в других положениях на выступе, сбрасываются устройством 9 вниз, в чашу, и проходят повторный путь по спиральному выступу 2. Движение деталей по спиральному выступу вверх внутри чаши вибробункера осуществляется благодаря вибрации чаши.
С помощью вибробункеров удается ориентировать миниатюрные детали часовых механизмов в сборочных автоматах, метизы и даже детали массой в несколько килограмм.
Бункеры с элеваторным подъемником (рис. 5) могут использоваться для подачи деталей малых и средних размеров, например, для подачи заготовок валов.
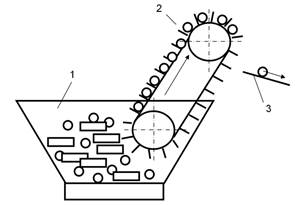
Рис.5. Бункер с элеваторным подъемником
Наклонная стенка бункера 1 способствует перемещению заготовок к передней стенке. Около передней стенки смонтирован скребковый конвейер 2. Непрерывно перемещающаяся лента конвейера с укрепленными на ней скребками может поднять из бункера только заготовку, расположенную горизонтально. Заготовки вала далее перегружаются на лоток 3. Далее заготовки могут транспортироваться шаговым конвейером автоматической линии.
На рис. 6 показан бункер для подачи деталей типа дисков.
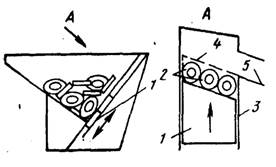
Рис.6. Бункер с ножевым захватом
Ножевой захват 1 перемещается вдоль стенки бункера вверх и вниз возвратно-поступательно с помощью, например, кулисного механизма или гидроцилиндра. При этом захват проходит через массу наваленных хаотически заготовок. Заготовки, оказавшиеся в положении, показанном на рисунке, поднимаются захватом. Ножевой захват имеет наклонный верхний торец. Но заготовки, поднимаемые торцом захвата, не могут скатиться, так как упираются в стенки 3 бункера. Как только захват поднимет их до положения 4, заготовки 2 скатятся в лоток 5, расположенный сбоку бункера.
Все описанные загрузочные устройства могут быть использованы и для загрузки заготовок на станки и для загрузки деталей на сборочный автомат.
Специальные подающие устройства могут подавать, как правило, детали только одного наименования и типоразмера, в ряде случаев нескольких близких по размерам и форме. Поэтому они могут применяться там, где требуется подача одних и тех же изделий в течение нескольких лет, т.е. в массовом и крупносерийном производстве.
Ориентирование заготовок и деталей. Детали должны быть поданы к рабочим органам сборочного автомата или к захвату робота в определенном требуемом, ориентированном положении. Если детали попадают на сборку в ориентированном положении, то дополнительных средств ориентации, как правило, не требуется за исключением тех случаев, когда положение детали, в котором она находится в кассете, должно быть изменено. Если детали подаются на сборку или заготовки на обработку в неупорядоченном положении, то для их установки необходимо, прежде всего, придать им требуемое положение в пространстве. Для этой цели используют различные ориентирующие устройства.
Различают два метода ориентации: пассивный и активный. При пассивном методе из потока разнообразно ориентированных деталей пропускаются только детали с требуемой ориентацией. Остальные детали вновь возвращаются в бункер, откуда снова подаются на вход ориентирующего устройства в случайных положениях. При активном методе ориентации неправильно ориентированные детали переориентируются требуемым образом.
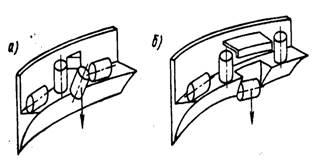
Рис.7. Устройство пассивной ориентации для перемещения деталей только в горизонтальном (а) или вертикальном (б) положениях.
Простейшие ориентирующие устройства представляют собой различные преграды на пути потока разноориентированных деталей, пройти которые могут только детали в требуемом положении. На рис. 7, а на пути потока деталей установлен упор, который отклоняет верхнюю часть деталей, двигающихся вертикально по выступу бункера. Смещение центра тяжести вызывает падение такой детали на дно бункера. Под упором могут пройти только горизонтально расположенные детали. На рис. 7, б показано устройство, пропускающее только вертикально двигающиеся валики, которые поддерживаются верхней скобой. Детали с горизонтально расположенной осью скатываются в выемку.
Устройство активной ориентации переориентирует неправильно ориентированные детали. Примером является устройство, ориентирующее винты головками вперед (рис. 8).
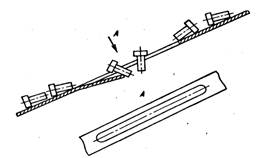
Рис.8. Устройство активной ориентации.
Винты по лотку скользят головками и вперед и назад, но тело болта проваливается в паз, болт принимает почти вертикальное положение, продолжая двигаться на нижнем торце головки. Ударяясь об уступ, болты поворачиваются и двигаются только головками вперед.
Ориентирование присоединяемых деталей относительно базовых.Собираемые детали подаются на сборочную позицию автомата в определенных положениях, удобных для их последующего соединения. Однако для того чтобы установить одну деталь на другую, необходимо расположить одну деталь относительно другой определенным образом с заданной точностью. Так, например, чтобы установить вал во втулку, необходимо обеспечить соосность вала с отверстием втулки. Предельно допустимое отклонение от соосности вала с отверстием определяется лишь шириной зазора: чем больше зазор, тем больше предельно допустимое отклонение от соосности, которое вычисляют по формуле  .
.
Учитывая, что диаметры валиков и отверстий имеют допустимые отклонения, необходимо, чтобы отклонение от соосности не превышало минимальной ширины радиального зазора:
 .
.
Если вал и отверстие имеют фаски, выполненные под углами, обеспечивающими скольжение одной фаски по другой, то при движении валика вдоль оси, благодаря фаскам он может попасть в отверстие втулки. В этом случае допустимое отклонение от соосности в исходном положении может быть больше на ширину фасок:
 .
.
Следует иметь в виду, что при установке валика во втулку с использованием фасок необходимо позволить деталям смещаться в радиальном направлении. Это достигается нежестким, упругим подвесом одной из соединяемых деталей.
Исходя из формул и принимая во внимание, что ширина радиальных зазоров для многих соединений с зазором в машинах составляет сотые и тысячные доли миллиметра, станет очевидным, что на деталях необходимо делать заходные фаски. При наличии фасок допуск относительного положения деталей может быть значительно большим, чем без фасок. Чем больше допуск отклонения от соосности деталей перед сборкой, тем легче его обеспечить при автоматической сборке.
Помимо смещения, возможно и отклонение от параллельности осей деталей, которое может быть определено по формуле
 ,
,
где z – заглубление.
Данные формулы справедливы для соединений с зазором. Для соединений с натягом используют следующие формулы:
 ;
;
 ,
,
где Сmax – большая ширина из Со или СВ.
С помощью указанных формул можно рассчитать предельно допустимые отклонения положения основных баз присоединяемой и вспомогательных баз базирующей детали, при которых возможно соединение деталей. Эти предельно допустимые отклонения иногда называют условиями собираемости.
Для осуществления автоматической сборки, погрешности положения деталей перед сборкой должны быть меньше предельно допустимых значений, в противном случае при сближении деталей сборочный автомат может заклинить. Чем больше предельно допустимые отклонения в исходном положении деталей, тем легче осуществить сборку, особенно автоматическую.
Относительное ориентирование деталей может осуществляться различными способами. Если при установке детали используются фаски, то, по крайней мере, одна из деталей должна иметь возможность смещаться перпендикулярно оси. Для этого захват робота или другого рабочего органа автомата оснащают упругим подвесом, позволяющим детали смещаться под действием сил, возникающих при соприкосновении поверхностей фасок.
Ориентация одной детали относительно другой может осуществляться рабочими органами сборочного автомата, например захватом робота. При этом погрешность позиционирования робота должна быть значительно меньше предельно допустимых погрешностей положения деталей с учетом погрешностей установки деталей. Установка одной детали в другую с зазором может осуществляться в воздушном потоке, в магнитном поле. Установка детали может выполняться поисковой системой с обратными связями. При установке детали измеряются силы сопротивления, определяется направление смещения детали, чтобы поставить ее требуемое положение.
Конструкция изделия, предназначенного для автоматической сборки, должна быть такой, чтобы автоматическую сборку можно было реализовать, и чтобы эта сборка была экономически целесообразной. Требования к технологичности изделий для автоматической сборки можно разделить на требования, предъявляемые к конструкции сборочных единиц, и требования, предъявляемые к конструкции деталей. Кроме того, можно выделить общие требования и специальные, относящиеся к отдельным видам соединений или к отдельным видам деталей.
Одной из возможностей реализации автоматической сборки является ужесточение требования к соосности отверстия и наружной поверхности втулки. Это удорожает изготовление втулки, но позволяет автоматизировать сборку.
Есть и другая возможность реализации автоматической сборки. Можно изменить базирование втулки в приспособлении. Втулку следует ориентировать не по наружному, а по внутреннему диаметру, например, с помощью подпружиненного конуса. В этом случае использование робота с малой погрешностью позиционирования позволяет осуществлять автоматическую сборку, но робот с такой погрешностью позиционирования весьма дорого стоит.
При использовании фасок при сборке, по крайней мере, одна собираемая деталь из двух должна иметь возможность свободно перемещаться в горизонтальной плоскости на расстояние, равное ширине фасок. С этой целью втулку не следует жестко зажимать по наружной поверхности, а необходимо поставить в приспособление с соответствующим радиальным зазором. В процессе установки валика во втулку роботом втулка может смещаться в зазоре под действием боковых сил, действующих по фаскам. С другой стороны, если зазор между втулкой и гнездом в кассете будет больше требуемого, то при сборке валик может торцом упереться в торец втулки и автоматическая сборка также будет невозможна. Таким образом, ширина зазора между втулкой и гнездом в кассете должна быть определена строгим расчётом. Слишком маленький зазор не позволит втулке смещаться и использовать заходные фаски при сборке, а слишком большой зазор приведет к чрезмерно большой погрешности положения втулки в кассете.
Лучшие условия для автоматической сборки можно создать, если втулка будет центрироваться в отверстии кассеты или в специальном приспособлении для сборки и в то же время будет иметь необходимую свободу относительных боковых перемещений. Это можно обеспечить, подпружинив втулку симметрично с боковой стороны установкой, например, трех пружин под углом 120° в плане. Поскольку в этом случае пришлось бы оснащать все гнезда кассеты такими пружинами для центрирования втулок или использовать дополнительное загрузочно-разгрузочное устройство для установки втулок в специальное "плавающее" приспособление, то целесообразно обеспечить подпружиненный в боковых направлениях захват валика, устанавливаемого во втулку.
В данном примере проанализировано только смещение осей при автоматической установке валика во втулку. Однако, может потребоваться такое крепление валика в захвате, которое бы обеспечивало возможность не только радиального смещения валика при установке во втулку, но и поворота оси валика в двух вертикальных плоскостях. Таким образом, задача существенно усложняется.
Анализ размерных связей при сборке позволяет, следовательно, согласовать размеры сборочной системы, обосновать требования к точности используемого робота, деталям для автоматической сборки и приспособлениям. При ручной сборке такой анализ не нужен, при автоматической – необходим, т.е. автоматизация сборки требует расчета размерных связей.
| <== предыдущая лекция | | | следующая лекция ==> |
| Автоматизированная система управления (АСУ) | | | Имитационное моделирование |
Дата добавления: 2016-12-16; просмотров: 7592;
Поиск по сайту
Узнать еще
- Yandex_direct_print() Сэндвич панели поэлементной сборки
- А – полносборная заводского изготовления; Б – поэлементной сборки
- А- технологические этапы изготовления
- Автоматизация сборки
- АВТОМАТИЧЕСКОЙ СВАРКИ ПОД СЛОЕМ ФЛЮСА
- Акушерство как наука. Этапы развития акушерства.
- Алгоритм и этапы решения задачи
- Алгоритмы и этапы проектирования цифровых устройств

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
