Структурная схема ПИ-регулятора
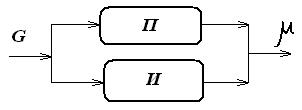 ∆G = G - GЗД
∆G = G - GЗД
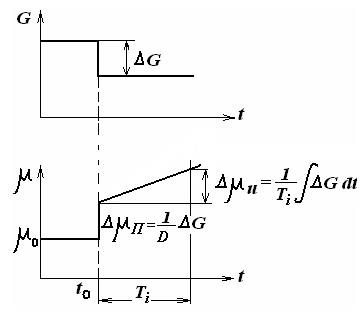
При нанесении на ПИ-регулятор ступенчатого возмущения первоначально срабатывает пропорциональная часть регулятора, перемещая мгновенно клапан на величину ∆µПР. Затем в действие вступает интегральная часть регулятора, которая медленно во времени перемещает клапан в том же направлении до завершения процесса регулирования, т.е., когда регулируемый параметр G будет доведен до GЗД.
Динамическая характеристика ПИ-регулятора:
Представляет собой сумму динамических характеристик П- и И-регуляторов.
 Закон регулирования ПИ-регулятора в дифференциальной форме:
Закон регулирования ПИ-регулятора в дифференциальной форме:
 ,
,
где  - пропорциональная составляющая,
- пропорциональная составляющая,  - интегральная составляющая.
- интегральная составляющая.
Закон регулирования ПИ-регулятора в интегральной форме:
 ,
,
где  - пропорциональная составляющая,
- пропорциональная составляющая,  - интегральная составляющая.
- интегральная составляющая.
Ti – время изодрома - этото время, за которое перемещается клапан под действием интегральной составляющей на такую же величину, на которую он предварительно переместился под воздействием пропорциональной составляющей.
ПИ-регуляторы имеют 2 параметра настройки:
-предел пропорциональности D от 5 % до 3000%;
-время изодрома Ti (время интегрирования 5 сек ÷ 100 мин).
Подбором этих параметров настройки добиваются желаемого вида переходного процесса. Оптимальным является переходной процесс с 20% перерегулированием. Если Ti= ∞,то ПИ-регулятор превращается в чисто П-регулятор. На пневматических регуляторах отключение интегральной части осуществляется путем перекрытия дросселя для настройки Ti.
Дата добавления: 2016-12-09; просмотров: 2637;
Поиск по сайту
Узнать еще
- A Схема затяжки болтов ГБЦ; болты 5 и 7 длиннее остальных и устанавливаются в свои места
- II. Функционально-структурная организация и программное обеспечение персонального компьютера
- II. Электрическая схема и принцип действия.
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- Pис. 2.23. Схема межсистемных венозных анастомозов (схема).
- V. Упрощенная схема замещения трансформатора и внешняя характеристика.
- А – схема структурная; б – схема эквивалентная
- Агрегація криптографічних перетворень, криптографічна схема

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
