Пропорционально-дифференциальные (ПД-регуляторы)
Если нагрузка объекта изменяется часто и резко, и при этом объект имеет существенное запаздывание, то ПИ-регулятор дает неудовлетворительное качество регулирования. Тогда целесообразно в закон регулирования вводить дифференцирующую составляющую, то есть воздействовать на регулирующий орган дополнительно по величине первой производной от изменения регулируемого параметра.
Закон регулирования ПД-регулятора:
 ,
,
где  - пропорциональная составляющая,
- пропорциональная составляющая,  - дифференциальная составляющая.
- дифференциальная составляющая.
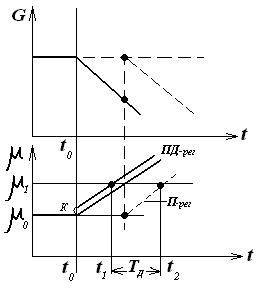 Тд – параметр настройки дифференциальной составляющей и его можно изменять от 5 сек до 10 мин. Если объект обладает определенным запаздыванием y = k∙x, y’= (k∙x)’ = k, где k = tg угла наклона прямой. За счет дифференциальной составляющей упреждается перемещение регулирующего органа.
Тд – параметр настройки дифференциальной составляющей и его можно изменять от 5 сек до 10 мин. Если объект обладает определенным запаздыванием y = k∙x, y’= (k∙x)’ = k, где k = tg угла наклона прямой. За счет дифференциальной составляющей упреждается перемещение регулирующего органа.
Время дифференцирования (время предварения) Тд – это интервал времени между моментами достижения регулирующим органом одинакового положения при наличии дифференциальной составляющей и без нее.
Чем больше время дифференцирования Тд, тем больше скачок в перемещении регулирующего органа.
При использовании управляющих ЭВМ закон регулирования устанавливается программно (есть соответствующая программа).
Дата добавления: 2016-12-09; просмотров: 1539;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
