Судовые лаги, их классификации Погрешности лагов и учет их в судовождении.
Судовые лаги служат для измерения скорости судна и пройденного расстояния. Лаги бывают:
1. Относительные.
2. Абсолютные.
Абсолютные - лаги, которые измеряют скорость судна относительно грунта.
К относительным причисляют лаги, которые измеряют скорость судна относительные воды.
Если лагом измеряют только продольную составляющую скорости судна, то его называют однокомпонентным. Если же лаг измеряет и поперечную составляющую скорости, то он называется двухкомпонентным или лагом-дрейфометром. В зависимости от физического закона, положенного в принцип работы лага, различают:
1. Гидродинамические лаги
2. Индукционные лаги.
3. Гидроакустические доплеровские лаги.
4. Гидроакустические корреляционные лаги.
1. Гидродинамические лаги используют зависимость гидродинамического давления от скорости судна, которая имеет следующую зависимость:

В данном типе лагов с помощью трубки Пито выделяется гидродинамическое давление набегающего потока воды, который возникает при движении судна.
По величине этого давления находят скорость судна.
Данный тип является относительным и однокомпонентным.
2. Индукционный лаг - использует закон электромагнитной индукции. В днище судна находится индукционный преобразователь , помещенный в морскую воду. При движении судна в индукционном преобразователе вырабатывается ЭДС, которая зависит от скорости судна. Эта ЭДС подается в схему лага и по ее величине рассчитывается текущее значение скорости судна. Для работы лага надо, чтобы вода, в которой помещен индукционный преобразователь проводил электрический ток, поэтому в пресной воде индукционный лаг работает неудовлетворительно.
3. Принцип работы гидроакустического доплеровского лага основан на эффекте Доплера.
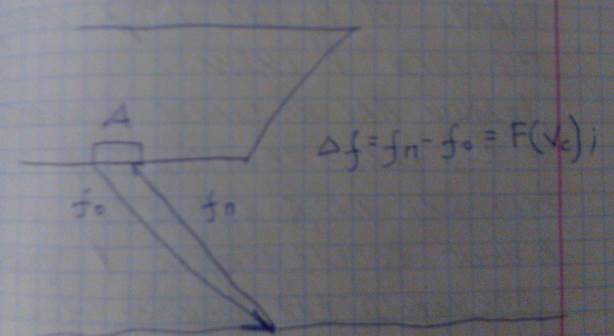
В доплеровском лаге гидроакустическая антенна А излучает электро-звуковые импульсы с опорной частотой f  , которые направлены в сторону дна. Отражаясь от дна импульсы опять поступают на гидродинамическую антенну А, однако их частота f
, которые направлены в сторону дна. Отражаясь от дна импульсы опять поступают на гидродинамическую антенну А, однако их частота f  из-за эффекта Доплера > f . Разность этих частот (
из-за эффекта Доплера > f . Разность этих частот (  ) называется доплеровским сдвигом частоты, который зависит от скорости судна. Измеряя , в лаге рассчитывается скорость судна.
) называется доплеровским сдвигом частоты, который зависит от скорости судна. Измеряя , в лаге рассчитывается скорость судна.
Данный лаг является абсолютным и двухкомпонентным, т.е изменяет как продольную, так и поперечную составляющую скорости судна.
Для повышения точности измерения скорости судна определение каждой составляющей производится с помощью 2-х лучевой системы. Импульсы посылаются как по направлению, так и в противоположную сторону.
4. Гидроакустический корреляционный лаг с помощью носовой и кормовой гидроакустической антенной зондирует дно под судном.
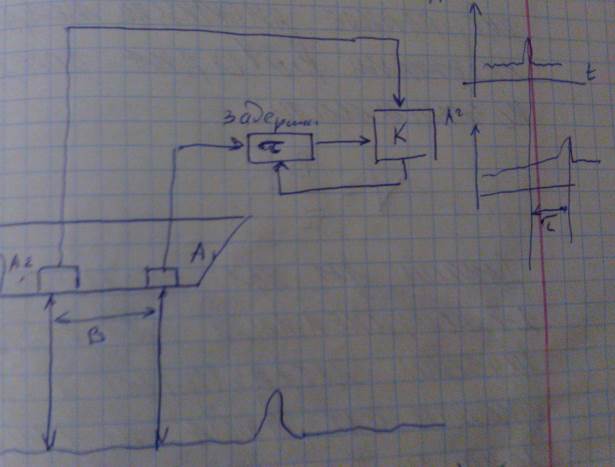
Сигал с первой антенный (носовой) A  подается на схему задержки времени T, а затем - на коррелятор K. Сигнал с кормовой антенны
подается на схему задержки времени T, а затем - на коррелятор K. Сигнал с кормовой антенны  подается сразу на коррелятор K. Коррелятор K изменяет величину задержки времени T так, чтобы сигналы максимально совпадали. В этом случае время задержки T равно времени, за которое судно проходит расстояние, равное дистанции между антеннами. B и V судна определяются по зависимости:
подается сразу на коррелятор K. Коррелятор K изменяет величину задержки времени T так, чтобы сигналы максимально совпадали. В этом случае время задержки T равно времени, за которое судно проходит расстояние, равное дистанции между антеннами. B и V судна определяются по зависимости:
 .
.
Данный лаг является абсолютным и двухкомпонентным. Оба гидроакустических лага измеряют скорость судна относительно грунта на глубинах до 400 м. При больших глубинах они работают в режиме относительного лага.
Для относительных лагов существуют 3 погрешности:
1. Постоянная погрешность, не зависящая от скорости судна.
2. Линейно-зависящая от скорости судна.
3. Нелинейно-зависящая от скорости судна.
Для компенсации данных погрешностей в схеме лага вырабатывают соответствующие поправки.
Дата добавления: 2021-03-18; просмотров: 1416;
Поиск по сайту
Узнать еще
- DSM — система классификации Американской психиатрической ассоциации
- I. Задачи Единой всероссийской спортивной классификации
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- I. Создание системы управленческого учета.
- II. СВЕДЕНИЯ О ВОИНСКОМ УЧЕТЕ
- III. Части речи и принципы их классификации
- Абсолютная и относительная погрешности
- Абсолютные и относительные погрешности

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
