Метод перемещений в расчетах статически неопределимых систем
Общие сведения о методе перемещений
СТЕПЕНЬ КИНЕМАТИЧЕСКОЙ НЕОПРЕДЕЛИМОСТИ
Под степенью кинематической неопределимости принято понимать число основных неизвестных метода перемещений — углов поворота и линейных перемещений жестких узлов системы. Это число зависит от допущений, принятых в методе:
1) концы стержней, сходящихся в одном жестком узле, т. е. связанные между собой припайками, поворачиваются на один и тот же угол;
2) не учитывается влияние N и Q на перемещения узлов;
3) расстояния между узлами при деформации изгиба прямых стержней не изменяются;
4) углы поворота по малости принимаются равными их тангенсам.
Число угловых перемещений узлов определяется числом жестких узлов, которые независимо могут поворачиваться. При этом за жесткий узел принимается всякий узел, в котором не менее двух стержней соединены между собой припайкой.
Число независимых поступательных перемещений узлов не равно числу узлов, которые могут поступательно перемещаться, так как на основании второго и третьего допущений не все поступательные перемещения могут быть независимы. Поступательные перемещения узлов рамы зависимы, и все они будут перемещаться по горизонтали на одинаковую величину. Поскольку расстояния между узлами, соединенными стержнем, при деформации не изменяются, то число независимых поступательных перемещений узлов заданной системы, составленной из прямых стержней, равно числу независимых перемещений узлов преобразованной системы, получаемой из заданной введением шарниров во все узлы, в том числе и опорные, считая все стержни преобразованной системы абсолютно жесткими. При этом все статически определимые консоли, если они есть в системе, должны быть предварительно отсечены.
За неизвестные поступательные перемещения принимаются независимые поступательные перемещения, число которых равно числу дополнительных связей, обращающих шарнирную схему в неизменяемую систему. Общее число угловых и независимых поступательных перемещений равно числу основных неизвестных метода перемещений или степени кинематической неопределимости. На рис. 1 показаны числа независимых перемещений узлов системы; пунктиром показаны связи, которые обращают шарнирную схему в неизменяемую систему.
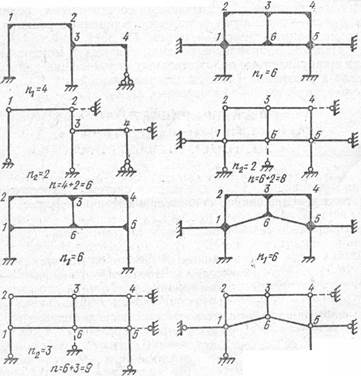
Рис. 1
Как и метод сил, метод перемещений является одним из важнейших методов расчета статически неопределимых систем. В качестве основных неизвестных в этом методе принимают упругие перемещения узлов системы: углы поворота узлов и их линейные перемещения (рис. 2, а).
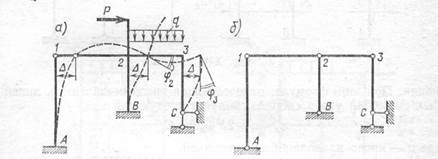
Рис. 2
Общее число неизвестных метода перемещений n, называемое степенью кинематической неопределимости системы, определяют как сумму неизвестных углов поворота nу и неизвестных линейных перемещений узлов nл:
n = nу + nл.
Число неизвестных углов поворота равно числу «жестких» узлов, вследствие чего определение nу сводится к простому подсчету числа «жестких» узлов рамы (например, узлы 2, 3 на рис. 2, а).
Для определения числа линейных перемещений узлов пл вводится предположение о том, что длины хорд упругих линий прямых стержней рамы после их деформации остаются равными первоначальным длинам этих стержней, т. е. не учитывается сближение концов прямого стержня при его изгибе и действии продольной силы. В результате этого число независимых линейных смещений узлов заданной системы будет равно степени свободы шарнирной схемы, полученной из заданной системы введением шарниров во все узлы, включая и опорные.
Таким образом, для рамы, представленной на рис. 1, а, число независимых линейных перемещений узлов будет равно:
пл = 2У — С — С0 = 12 — 5 — 6 = 1, а общее число неизвестных при nу = 2 составит
п = 2+1=3.
В том случае, если заданная система содержит кроме прямых и криволинейные стержни (рис. 3), необходимо учитывать возможное сближение концов криволинейных стержней после их деформации. При этом формула, определяющая число независимых линейных смещений узлов системы, получит следующий вид:
nл = а + 2У – С – С0,
где а — число криволинейных стержней.
Например, для рамы, изображенной на рис. 2, будем иметь:
nл = 1 +12 —5 —6 = 2 и n = 3 + 2 = 5.
Дата добавления: 2016-11-29; просмотров: 2588;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
