Влияние структуры зондирующего сигнала на помехозащищенность и точностные характеристики радиолокатора
Как известно из общей теории радиолокации точностные характеристики и защищенность РЛС от воздействия активных и пассивных помех в значительной мере зависят от структуры зондирующих сигналов.
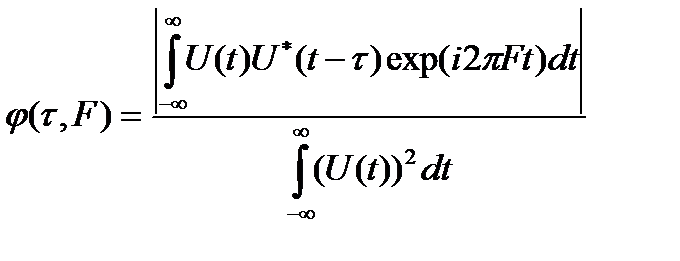
При оценке возможностей измерения дальности и скорости цели в случае использования сигналов с той или иной частотно-временной структурой широко используется понятие о двумерной автокорреляционной функции. Последняя определяет выход корреляционной схемы оптимальной обработки, когда на нее поступает сигнал, параметры которого - время запаздывания и частота - отличаются от ожидаемых на величину τ и F соответственно.
Нормированная двумерная корреляционная функция сигнала с комплексной амплитудой  в случае использования в приемном устройстве согласованных фильтраций будет иметь вид:
в случае использования в приемном устройстве согласованных фильтраций будет иметь вид:
 .
.
По форме функции неопределенности можно для заданной радиолокационной обстановки оценить возможности различных сигналов в отношении точности и разрешающей способности при измерении дальности (по величине τ) и скорости (по величине F). При этом оптимальность выбранного сигнала определяют степенью согласования его характеристик с условиями, задаваемыми целями и источниками помех. Нежелательно применять сигналы, у которых функция неопределенности обладает в рабочем диапазоне задержек и доплеровских смещений частоты боковыми лепестками высокого уровня. Последние обусловливают возможность возникновения интенсивных взаимных помех от различных целей. На фоне этих помех в широком диапазоне дальностей затрудняется выделение слабых сигналов от других целей, что особенно заметно снижает помехозащищенность при плотном потоке целей. Снижается также защищенность от пассивных помех за счет приема составляющих этих помех, приходящих с соседних импульсных объемов. Последнее обстоятельство весьма существенно для загоризонтной радиолокации, где уровень пассивных помех высок в широком диапазоне дальностей.
С учетом изложенного приемлемой при наличии интенсивных распределенных в широкой пространственной области пассивных помех является структура зондирующего сигнала в виде короткого радиоимпульса с гауссовской огибающей. Такой сигнал обладает сравнительно высокой разрешающей способностью по дальности и низким монотонно убывающим с увеличением τ уровнем боковых лепестков. Поэтому первые зарубежные ЗГ РЛС работали с короткими зондирующими импульсами (примерно 100 мкс у РЛС «Мадре»).Однако для обнаружения загоризонтных целей и оценки их параметров в условиях воздействия внешних активных помех и собственных шумов должна быть обеспечена значительная энергия излучения. Последнее требует при малых длительностях импульсов весьма высокой импульсной мощности, что связано с серьезными техническими трудностями. В таких условиях оказывается необходимым идти по пути увеличения длительности импульсов. Для обеспечения при этом высокой разрешающей способности по дальности необходимо использовать внутриимпульсную модуляцию, чаще всего фазовую модуляцию (ФМ) либо линейную частотную модуляцию (ЛЧМ), что приводит к расширению спектра сигнала. При этом произведение ширины спектра сигнала ∆f на его длительность Т (база сигнала Бс) оказывается значительно больше единицы. Длительность таких сложных эхо-сигналов после их обработки в устройствах временного сжатия может быть уменьшена в Бс раз, т. е. до значения, обратного ∆f .
При фазовой модуляции в некоторых случаях используются коды Баркера, для которых число элементарных дискретов N в импульсе соответствует условию N≤13. В случае использования кодов Баркера при нулевой доплеровской частоте (  = 0) почти вся энергия сигнала сосредоточена в пределах основного излучения; побочное излучение, характеризуемое боковыми лепестками функции неопределенности, имеет малое значение. Так, при N = 13 амплитуды боковых лепестков будут примерно равны 1/N = 0,07. При расстройке по частоте ( ≠0) амплитуда боковых лепестков возрастает. Применяется также фазокодовая модуляция с использованием M-последовательности в этом случае средний уровень амплитуды боковых лепестков
= 0) почти вся энергия сигнала сосредоточена в пределах основного излучения; побочное излучение, характеризуемое боковыми лепестками функции неопределенности, имеет малое значение. Так, при N = 13 амплитуды боковых лепестков будут примерно равны 1/N = 0,07. При расстройке по частоте ( ≠0) амплитуда боковых лепестков возрастает. Применяется также фазокодовая модуляция с использованием M-последовательности в этом случае средний уровень амплитуды боковых лепестков  . Вместе с тем наблюдаются выбросы, достигающие значения
. Вместе с тем наблюдаются выбросы, достигающие значения  .
.
Применение сигналов ФМ эффективно при больших значениях произведения ширины их спектра на длительность. Генерация и обработка таких сигналов не представляют существенных трудностей, особенно в случае использования М -последовательностей. Однако на максимально допустимые значения ширины спектра зондирующего импульса РЛС декартового диапазона ограничения налагают дисперсионные (в первую очередь фазовые) искажения, возникающие при распространении радиоволн в ионосфере. Они приводят к ухудшению разрешающей способности и точности определения координат, так и к уменьшению отношения сигнал-помеха, т. е. к снижению помехозащищенности РЛС. Это затрудняет использование в радиолокаторах декаметрового диапазона ФМ сигналов с большой базой.
В случае применения ЛЧМ сигналов обеспечивается монотонное убывание уровня боковых лепестков по дальности и отсутствие, выбросов. При этом, как известно из теоретических основ радиолокации, значительного (30...40 дБ) снижения уровня боковых лепестков функции неопределенности можно достигнуть путем весовой обработки сигнала. Последняя может быть осуществлена частотным методом за счет использования фильтров с АЧХ, спадающей к краям спектра сигнала, либо временным методом путем коррекции закона изменения частоты или формы огибающей импульса. Так, в случае использования корректирующего частотного фильтра Хэмминга с характеристикой, аппроксимируемой выражением  , уровень максимального бокового лепестка относительно основного не превышает 42,8 дБ. При этом несколько (в 1,5 раза) расширяется основной лепесток, что приводит к незначительным (около 1,5 дБ) потерям в отношении сигнал-шум.
, уровень максимального бокового лепестка относительно основного не превышает 42,8 дБ. При этом несколько (в 1,5 раза) расширяется основной лепесток, что приводит к незначительным (около 1,5 дБ) потерям в отношении сигнал-шум.
При рассогласовании ЛЧМ радиоимпульсов по частоте возникает временное смещение сжатых радиоимпульсов. Для устранения этого смещения приходится усложнять обработку принимаемых сигналов.
Практически «чистую» область вокруг центрального пика функции неопределенности можно получить, применив периодически повторяющиеся когерентные произвольные по своей частотно-временной структуре импульсы, ширина спектра которых значительно больше частоты повторения импульсов. Сигналы такого класса обеспечивают хорошее разрешение в условиях множественных целей большой плотности. Однако им свойственна неоднозначность при измерениях координат. В ряде случаев для ее устранения может потребоваться одновременное использование двух или более таких импульсных последовательностей с отличающимися
частотами повторения.
Таким образом, структура зондирующего сигнала существенно влияет на целый ряд важных характеристик РЛС, а также на ее помехозащищенность; выбор конкретного вида сигнала определяется назначением РЛС и предъявляемыми к ней требованиями.
Дата добавления: 2021-02-19; просмотров: 736;
Поиск по сайту
Узнать еще
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- V. Атмосфера. Влияние деятельности человека на атмосферу и климат
- VI. Гидросфера. Влияние деятельности человека
- VI.3. Мировой океан. Влияние деятельности человека

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
