Предупреждение столкновений воздушных судов
Одной из особенностей, присущих современной авиационной ситуации, является достаточно высокая плотность воздушного движения, особенно в районах крупных аэропортов. Эта особенность, приводит нередко к возникновению конфликтной обстановки, которая чаще всего характеризуется возможным пересечением траекторий полета ВС. При этом, если указанное пересечение прогнозируется на различных и далеко отстоящих друг от друга по величине высотах полета, то уровень конфликтности имеет здесь весьма малую величину, и необходимость в принятии каких-либо предупредительных мер практически исчезает. Иное дело, если пересечение маршрутов будет, по предположению, происходить при малой разнице высот или в одной плоскости (наихудший случай) – такое возможное событие приобретает высокий уровень конфликтности, поскольку чревато столкновением самолетов, и расценивается как чрезвычайное происшествие, которого необходимо избегать всеми возможными средствами.
Радиосистемы предупреждения столкновений являются одними из основных средств предотвращения гибельного развития конфликта, поскольку позволяют заранее прояснить сложившуюся воздушную ситуацию и выработать сигнал аварийного предупреждения.
Концепция функционирования РСПС в наиболее общем виде состоит в реализации так называемого «t–критерия», заключающегося в вычислении (и индикации) текущего значения интервала времени t и сравнению его с заранее определенными пороговыми величинами t1 и t2.
Для нахождения t воспользуемся геометрической картиной, изображенной на рис. 7.1.
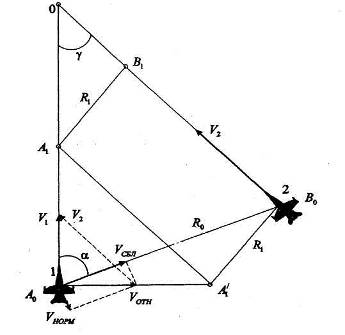
| Рис. 7.1. Геометрические величины, характеризующие сближение самолетов |
Пусть траектории двух самолетов, движущихся в одной плоскости прямолинейно и с постоянными скоростями, пересекаются в точке 0 под углом g. При этом в начальный момент времени t0 самолет 1 находится в точке А0, а самолет 2 – в точке В0. Расстояние между этими точками обозначим R0, а угол, под которым самолет 2 наблюдается из самолета 1 – как a. Тогда в некий следующий момент времени t1 самолет 1, летящий со скоростью V1 окажется в точке А1, а самолет 2, перемещающийся со скоростью V2 – в точке В1. В общем случае из-за различных скоростей отрезок R1 (расстояние между точками А1 и В1) не будет параллелен отрезку R0. Такова исходная геометрическая ситуация.
Выполним дополнительные построения.
Переместим отрезок R1 параллельно самому себе так, чтобы точка В1 совместилась с точкой В0 – тогда новым положением точки А1 окажется точка  . Соединим точки
. Соединим точки  и А0.
и А0.
Перенесем вектор V2 к вектору V1; тогда разностью этих векторов окажется вектор относительной скорости Vотн, ориентированный вдоль отрезка  . Разложим вектор Vотн на две ортогональные составляющие – скорость сближения VСБЛ (вдоль отрезка А0В0) и скорость VHOPM.
. Разложим вектор Vотн на две ортогональные составляющие – скорость сближения VСБЛ (вдоль отрезка А0В0) и скорость VHOPM.
Также можно записать следующие тригонометрические соотношения:
для скорости сближения
 ; (7.1)
; (7.1)
для относительной скорости
 ; (7.2)
; (7.2)
для нормальной (ортогональной) составляющей скорости
 ; (7.3)
; (7.3)
для расстояния R1 в произвольный момент времени t
 , (7.4)
, (7.4)
где t = t1 – t0.
Время tСБЛ, отсчитываемое от момента времени t1 до минимального (в пределах треугольника А0ОВ0) расстояния между самолетами 1 и 2, будет определяться из уравнения  и запишется в окончательном виде как
и запишется в окончательном виде как
 . (7.5)
. (7.5)
Если изначально вычисляемую величину t рассматривать как минимальное время tСБЛ min, то полагая VСБЛ = VОТН, получим:
 . (7.6)
. (7.6)
Формальный анализ этого соотношения говорит о равноправности влияния R0 и VСБЛ на t; однако, исходя из результатов летной практики, можно сделать вывод, что основным компонентом, влияющим на выбор t, как интервала времени до наибольшего сближения, является все же величина R0.
Для получения конкретных значений t1 и t2 (пороговых величин t) воспользуемся выражениями для вычисления длительностей маневра tВЕРТ и tГОР в вертикальной и горизонтальной плоскостях:
 , (7.7)
, (7.7)
 , (7.8)
, (7.8)
где hБЕЗ – безопасная разность высот самолетов 1 и 2; V – скорость самолета, выполняющего маневр;
aВЕРТ — нормальное ускорение в вертикальной плоскости; RБЕЗ – безопасное расстояние в горизонтальной плоскости;
RГОР – радиус разворота в горизонтальной плоскости.
При этом величина RГОР рассчитывается как
 , (7.9)
, (7.9)
где b – угол крена;
aГОР – нормальное ускорение в горизонтальной плоскости.
Алгоритм работы РСПС согласно t–критерию формулируется следующим образом: если в процессе измерения величина t окажется равной значению t1, самолетами 1 и 2 должно быть начато формирование взаимно-координированных маневров по уклонению от столкновения, а если – равной t2, то маневр должен начать выполняться. Например, для самолетов гражданской авиации t1=40 с, t2=30 с.
При этом, когда текущее значение t меньше, чем t1, на индикаторном табло пилота должен загореться сигнал, запрещающий горизонтальные маневры, а в запросный (излучаемый) радиосигнал включается информация о степенях свободы защищаемого (от столкновения) самолета: вверх – свободна верхняя зона пространства, вниз – свободна нижняя полусфера, вверх-вниз – свободны обе области, прямо – обе зоны предупреждения заняты. На указанный запрос сближающийся самолет отвечает радиосигналом, в состав которого включается (соответствующим кодом) рекомендация защищаемому самолету выполнить один из трех маневров – вверх, вниз или прямо. Полученная рекомендация отображается на индикаторе пилота. При t £ t2 на индикатор пилота выдается команда на выполнение маневра. В случае, когда сближающиеся самолеты достигают высоты безопасного расхождения, указанные команды не передаются, а в запросных радиосигналах защищаемого самолета перестают передаваться данные о его степенях свободы.
Подавляющее большинство бортовых РСПС работает в запросно-ответном режиме. Это означает, что оценка степени опасности складывающейся воздушной обстановки выполняется на защищаемом самолете по информации, содержащейся в радиосигнале, полученном от облучаемого самолета.
Импульсная запросно-ответная РСПС является, пожалуй, наиболее простой из тех, которые используются в современной авиации.
Существующие системы предупреждения столкновений относятся к классу взаимодействующих и представляют собой классические радиолокационные системы с активным ответом и радиолинии наземного и космического базирования.
БСПС информирует летный экипаж о воздушной обстановке посредством представления визуальной и речевой информации, обеспечивает своевременное обнаружение конфликтных самолетов, осуществляет классификацию степени их опасности и выдает рекомендации на выполнение соответствующего вертикального маневра.
БСПС функционирует независимо от работы бортового навигационного оборудования и наземных систем, используемых в обеспечении воздушного движения.
В настоящее время существует четыре вида систем БСПС:
- БСПС I является самой простейшей системой предупреждения столкновения. Она применяется на самолетах авиации общего назначения. Ее передатчик посылает и принимает сигналы ответчика в режиме С. Бортовой компьютер анализирует и представляет на индикаторе пилоту информацию о пеленге и относительной высоте полета всех самолетов в зоне обзора системы, примерно 40 миль (74 км). В системе предусмотрены цветные кодовые знаки для обозначения на дисплее самолетов, представляющих потенциальную угрозу столкновения.
Информация БСПС I получила название предупреждение о воздушном движении TA (Traffic Advisory).
Когда пилот получает ТА, он должен попытаться визуально обнаружить конфликтное ВС и самостоятельно выполнить маневры по предотвращению столкновения. В условиях ППП, для разрешения конфликта пилоту требуется информация от органа ОВД.
- БСПС II более совершенная система. С 1994 года ею стали оборудоваться все коммерческие воздушные суда. Она обладает всеми возможностями предыдущей системы, плюс вырабатывает рекомендации по расхождению с воздушными судами RA (Resolution Advisory).
- БСПС III обладает повышенной точностью по сравнению с предыдущими и, имеет гораздо меньшие погрешности по измерению пеленга.
- БСПС IV – последний вид, который активно разрабатывается, в настоящее время.
БСПС, контролируя воздушное пространство вокруг своего самолета, запрашивает ответчики соседних воздушных судов и посылает им сообщения о своих полетных данных. Полученные ответы анализируются и определяются те ВС, с которыми возможна вероятность столкновения (так называемые «самолеты-нарушители»).
БСПС рассчитывает и анализирует следующие параметры:
- расстояние между своим самолетом и самолетом-нарушителем;
- курсовой угол самолета-нарушителя;
-высоту и вертикальную скорость самолета-нарушителя, если от ответчика поступает сигнал об абсолютной высоте полета;
- суммарную скорость сближения между своим самолетом и самолетом-нарушителем.
Если бортовой компьютер определит, что границы безопасности могут быть нарушены, то система выдаст экипажу уведомление (ТА) о том, что другой самолет представляет потенциальную угрозу столкновения.
Состав и взаимодействие оборудования БСПС II на рис.7.2.
Через свои антенны БСПС, опрашивает все ответчики самолетов, находящихся в зоне ее обзора. Обрабатывая ответные сигналы, БСПС анализирует дальность, направление и высоту (при ее передаче) до этих самолетов.
Проанализировав несколько соответствующих ответов, БСПС рассчитывает время полета до момента предельного схождения (CPA closest point of approach) с самолетом-нарушителем путем деления расстояния между самолетами и относительной скоростью их сближения. Это временное значение является основным параметром для выработки предупреждающих сообщений и зависит от скорости ВС.
БСПС вырабатывает два типа сообщений (рис.7.3.):
-ТА, сообщение о движении, которое помогает пилоту визуально обнаружить самолет-нарушитель и готовит летчика выполнять упреждающие действия;
- RA, сообщение о необходимых действиях, выполнение которых обеспечит избежать столкновения с самолетом-нарушителем.
Рекомендации RA вырабатываются только в вертикальной плоскости, при отключенном автопилоте.
Существуют два типа RA, предупредительный и директивный. Предупредительный тип RA, дает рекомендации пилоту не изменять высоту полета (либо режим изменения высоты), чтобы избежать столкновение.
Директивный, рекомендует пилоту выполнить набор или снижение с установленной вертикальной скоростью до 2500 футов в минуту (13 м/с) для разрешения конфликта. БСПС II функционирует совместно с ответчиками, работающими в режимах А/С или S.
БСПС, запрашивая бортовые ответчики других воздушных судов, анализирует полученный ответ, определяет дальность, курсовой угол и относительную высоту самолета-нарушителя, если имеются данные об их высоте.
Анализируя, данные радиолокационного наблюдения (дальность между самолетами и направление), в обычном режиме, раз в секунду, БСПС рассчитывает относительную скорость сближения каждого ВС в зоне обзора, для определения времени в секундах до момента СРА. Сигналы на выходе при выполнении алгоритма слежения (дальность до самолета, уменьшение продольного интервала в моменте СРА) обеспечивают работу алгоритмов по выработке ТА и определения угрозы столкновения.
Для каждого самолета, БСПС производит тесты по дальности и по высоте, когда нет данных о высоте полета самолета-нарушителя, система считает, что данное ВС находится на одинаковой высоте с собственным самолетом. Когда результат теста дает положительный результат по дальности и по высоте, БСПС вырабатывает рекомендации ТА. В ситуации, когда нет данных о высоте самолета-нарушителя, RA не вырабатываются.
Тесты по дальности и высоте выполняются по каждому самолету-нарушителю. При положительном результате теста по какому-нибудь одному параметру, БСПС начинает вырабатывать рекомендации по расхождению RA.
Выработка RA происходит в два этапа. Первый – определение направления «вверх или вниз» в зависимости от геометрии конфликта. Второй - определение интенсивности RA. По интенсивности вырабатывается, как минимум, ускоренный маневр по вертикальной скорости, который обеспечит успешное достижение интервала по высоте.
На рисунке 7.4. представлен пример выработки направления RA.
Наша БСПС (на рисунке левое ВС), определив момент СРА для каждого воздушного судна, прогнозируя траекторию самолета-нарушителя, вычисляет место схождения с ним. Далее, система определяет возможный диапазон вертикального маневра собственного ВС, как на набор, так и на снижение. Логика выбора маневра зависит от большей величины интервала между самолетами в момент расхождения. Интервал В, в данной ситуации, больше интервала А, поэтому система выбирает вариант В на снижение.
В общем случае, то ВС, которое первое обнаружило угрозу, имеет приоритет в выработке варианта RA. В большинстве случаев, два самолета определяют друг друга как угроза в различные моменты времени. После выработки RA, первое ВС посылает сообщение о собственной RA второму, рассматриваемому как угроза. Второе ВС, затем отбирает вариант RA противоположный первому и посылает ему подтверждающее сообщение.
В случае, когда оба самолета одновременно обнаруживают и оценивают друг друга как угрозу, приоритетным в выработке RA выбирается ВС, имеющее больший код индивидуального опознавания.
Дата добавления: 2021-02-19; просмотров: 726;
Поиск по сайту
Узнать еще
- АВАРИЙНОЕ СНАБЖЕНИЕ СУДОВ
- Авиационных двигателей и воздушных винтов
- Андеррайтинг морских судов
- Аномалии почечных сосудов
- Аппарат областного Минского городского судов
- Аппаратура пуска, регулирования и защиты судовых приводов и устройств.
- АРХИТЕКТУРНЫЕ ТИПЫ СУДОВ.
- Береговые знаки обозначения судового хода.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
