Зависимость усредненных ЭП от выбора углового сектора усреднения.
Можно при необходимости учесть различия ЭП в различныхсравнительнокрупных угловых секторах, предусматривая оцениваниеномера сектора по траекторным данным,
Отличие измеренных ЭП от усредненных зависит, наряду со временем усреднения, от статистики отраженного сигнала при движении цели и от характера зондирования (постоянства или возможности изменения несущей частоты). Возникающие при этом эффекты поясняются ниже результатами математического моделирования (разд. 1.3) применительно к десятисантиметровому диапазону волн.
На рис. 1.2 приведены примеры распределения плотностей вероятности  [м2] и [дБ] для самолетов больших размеров (рис. 1.2,а, б), для самолетов средних размеров (рис. 1.2,в, г) и для крылатых ракет (рис, 1.2,д, е).
[м2] и [дБ] для самолетов больших размеров (рис. 1.2,а, б), для самолетов средних размеров (рис. 1.2,в, г) и для крылатых ракет (рис, 1.2,д, е).
На рис. 1.3 приведены примеры участков характеристик обратного вторичного излучения самолета большого размера (ряс. 1.3,а) и крылатой ракеты (рис. 1.3,6). Видно, что для цели меньших размеров лепестки характеристики обратного вторичного излучения шире. Соответственно этому нормированные корреляционные функции флюктуаций амплитуд сигналов, вызываемых изменениями курсового угла в процессе движения цели, имеют для целей различных классов разную ширину (рис. 1.4). Чем цель меньше, тем корреляционная функция шире.
На рис. 1.5 показаны зависимости ЭП от несущей частоты колебаний для самолета большого размера (рис. 1.5, а) и крылатой ракеты (рис. 1.5, б). На рис. 1.6 представлены соответствующие нормированные корреляционные функции флюктуаций амплитуд сигналов, возникающих при изменении частоты. Чем цель меньше, тем шире лепестки зависимости (рис. 1.5) и основной лепесток корреляционной функции (рис. 1.6).
Зависимости (рис. 1.5 - 1.6), сходные с зависимостями (рис. 1.3 - 1.4), показывают, что усреднение по времени (углу Θ) может заменяться усреднением по несущей частоте.
Рис. 1.7 поясняет зависимость от числа усреднений N среднеквадратического отклонения ЭП, нормированного к максимальному значению ЭП при N = 1. Штриховкой показана область распределения этого отношения по результатам моделирования в предположении слабой корреляции между отсчетами вследствие их временного или частотного разнесения. Необходимое число обращений к цели зависит от выбранного алфавита классов, частотного диапазона, степени использования других признаков.
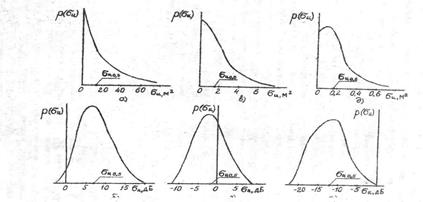
Рис. 1.2. Плотности распределения при узкополосном зондировании: а, 6-самолет больших размеров: в, г - самолет средних размеров; д, е - крылатая ракета; а, в, д - выражена в м2; 6 г, е - выражена в дБ
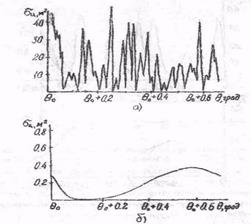
Рис. 1.3. Участки диаграмм обратного вторичного излучения: а - самолет больших размеров: б – крылатая ракета
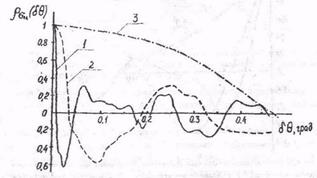
Рис. 1.4. Корреляционные функции флюктуаций ЭП целей при изменениях ракурса на δΘ: 1–самолет больших размеров; 2 - самолет средних размеров; 3 -крылатая ракета
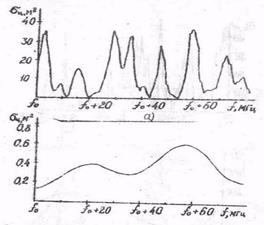
Рис. 1.5. Частотные зависимости ЭП целей: а - самолет больших размеров; б – крылатая ракета
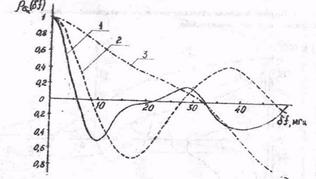
Рис. 1.6. Корреляционные функции флюктуаций ЭП целей при изменениях несущей частоты на δf: 1 –самолет больших размеров; 2-самолет средних размеров; 3– крылатая ракета
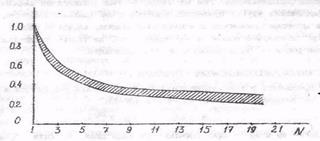
Рис. 1.7. Зависимость нормированного среднеквадратического отклонения оценок ЭП целей от числа усреднений N.
На рис. 1.8 приведены области распределения значений [дБ] для целей больших 1, средних 2 и малых 3 размеров в отсутствие противолокационной маскировки и имитации. Пунктиром показано возможное расширение этих областей за счет зависимости результата измерений от нестабильностей. Последняя зависимость может быть учтена путем введения децибельных поправок на эксплуатационные изменения фактической мощностипередатчика,чувствительности приемника, потерь в антенной системе и на текущее состояние среды.
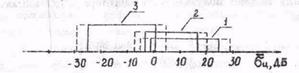
Рис. 1.3. Области существования ЭП целей, выраженной в дБ: 1 - самолеты больших размеров; 2 - самолеты средних размеров, 3 - крылатые ракеты и легкомоторные самолеты
Противолокационная имитация и маскировка. Для целей малых размеров может сводиться к искусственному увеличению ЭП, чтобы отвлечь на них удар, предназначаемый по целям больших или средних размеров [44]. Противолокационная маскировка целей больших и средних размеров сводятся к использованию технологий типа "Стелс", позволяющих доводить их ЭП до ЭП малоразмерных целей, обычно снижающих полную скорость и маневренность [110]. Все это, конечно, снижает возможности использования ЭП как признак распознавания. Тем не менее, за счет расширения алфавита классов и привлечения других признаков распознавания (размер, скорость, использование многопозиционности локации) можно, в принципе, при достаточно большом потенциале РЛС не только предотвращать ошибочные решения, но и выявлять наличие имитации.
1.4.2. поляризационные признаки
Информация о поляризационных свойствах целей содержится в поляризационной матрице вторичного излучения [30-35]
 . (1.4)
. (1.4)
Здесь σil и ψil- эффективная площадь цели и сдвиг фазы сигнала при отражении для i-й поляризации приемной антенны и l-й поляризации передающей (i, l = 1, 2). Измерение всех элементов поляризационной матрицы предполагает как зондирование, так и прием на двух ортогональных линейных или круговых поляризациях. При однопозиционном приеме матрица А характеризуется пятью независимыми параметрами:  и может быть приведена к диагональной форме. Она сразу находился в этой форме вслучае подбора измерительных поляризаций (поляризационного базиса). Так, поляризационная матрица полуволнового вибратора в горизонтально-вертикальном базисе
и может быть приведена к диагональной форме. Она сразу находился в этой форме вслучае подбора измерительных поляризаций (поляризационного базиса). Так, поляризационная матрица полуволнового вибратора в горизонтально-вертикальном базисе
 (1.5)
(1.5)
зависит от угла поворота θ в плоскости векторов электрического поле вертикальной и горизонтальной поляризаций. Путем перехода к собственному базису θ=0 матрица становится диагональной:
 (1.6)
(1.6)
Полуволновой вибратор является поляризационно-избирательным объектом. Он преимущественно отражает сигналы определенной поляризации.
Наоборот, выпуклые гладкие идеально проводящие тела являются в высокочастотном приближении поляризациокно-неизбирательными. При любом их расположении относительно поляризационного базиса матрица А имеет вид (1.6).
Использование поляризационной информации дает наибольший эффект наметровых волнах, а в диапазонах сантиметровых и дециметровых воли – для тел осесимметричной формы. Имеется возможность определить ориентацию последних, наличие или отсутствие деполяризующих элементов, выявить прецессионные движения.
Такие цели, как самолеты, на сантиметровых и дециметровых волках сводятся к совокупностям поляризационно-неизбирательных (фюзеляж, гондолы двигателей, подвесные топливные баки) и поляризационно-избирательных элементов (кромки крыльев, хвостового оперения и воздухозаборников, антенны РЛС и т.д.). Принимаемый сигнал формируется как суперпозиция отражений отдельных элементов и имеет эллиптическую поляризацию, интерпретация которой при узкополосном излучении может вызвать затруднения.
На точность измерения параметров поляризационной матрицыможет сказываться плохая развязка ортогонально поляризованных трактов, влияние отражений от земной поверхности и прохождения радиоволн через ионосферу Земли.
Дата добавления: 2021-02-19; просмотров: 729;
Поиск по сайту
Узнать еще
- V.VII. Зависимость ширины и формы выхода слоя на поверхности от его истинной мощности, угла падения и формы рельефа
- АВТОНОМНОСТЬ, НЕЗАВИСИМОСТЬ ОТ КУЛЬТУРЫ И СРЕДЫ, ВОЛЯ И АКТИВНОСТЬ
- Алгоритм выбора технологии обучения
- Анализ критериев выбора двигателей мехатронных систем
- Ансамбль и его зависимость от фактурымузыкального произведения.
- Аппаратная зависимость и переносимость ОС
- АХ – это зависимость амплитуды выходного напряжения от амплитуды входного напряжения.
- БАЗИСНЫЙ НАБОР ХАРАКТЕРИСТИК ДЛЯ ВЫБОРА АСУ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
