Лекция 3 Базовая станция. Сеть базовых станций.
RTK-сеть – это сеть постоянно действующих GNSS геодезических приемников (базовых станций), данные с которых используются для формирования RTK-поправок для работы в режиме реального времени. Такое формирование поправок получило название «Сетевое RTK». Данные сети могут варьироваться по размеру от небольших локальных сетей, состоящих из нескольких базовых станций, до обширных национальных проектов, которые покрывают территорию всей страны.
RTK-поправки могут формироваться различными способами:
§ Master-Auxiliary corrections (MAX);
§ Индивидуальные MAX (i-MAX);
§ Виртуальная базовая станций (VRS);
§ Flachen-Korrektur-Parameter (FKP) – метод площадных поправок.
Одиночная базовая станция может быть установлена на крыше офисного здания, на постоянной основе, или только на время выполнения работ в поле на исходном пункте. Принцип работы в режиме RTK заключается в том что, базовая станция устанавливается на точке с известными координатами и передает поправки на ровер-приемник. Как правило, используется односторонняя линия связи.
Основные этапы при работе в режиме RTK:
§ базовая станция и ровер принимают сигналы от одного и того же созвездия спутников;
§ базовая станция передает свои координаты и спутниковые измерения на ровер;
§ ровер совместно обрабатывает измерения с базовой станции со своими измерениями и вычисляет координаты в режиме реального времени.
Координаты вычисляются с использованием специальных алгоритмов. Основным преимуществом данного алгоритма является возможность надежной и эффективной работы на расстоянии до 50 км от базовой станции.
Преимуществом одиночной базовой станции является относительно простой и понятный принцип работы, а недостатком – приобретение локальной базовой станции, временные затраты на установку и настройку базовой станции, уменьшение точности определения координат с удалением ровера от базовой станции. Уменьшение точности определения координат при увеличении расстояния от базовой станции происходит в основном из-за влияния атмосферы. По мере увеличения расстояния, увеличивается разница в состоянии атмосферы над ровером и базовой станцией. Это делает более затруднительным для ровера процесс разрешения неоднозначности фазовых измерений и приводит к уменьшению точности.
Для сетевого RTK базовые станции расположены на расстоянии не более 70 км друг от друга. Они являются постоянно действующими и составляют сеть RTK [5].
Первое требование для реализации сетевого метода RTK заключается в том, что все базовые станции сети должны непрерывно передавать спутниковые данные на центральный сервер, где установлено специализированное программное обеспечение (рис. 2.17). Целью сетевого RTK является минимизация влияния ошибок, зависящих от расстояния, на определения координат в пределах территории покрываемой сетью базовых станций. При функционировании сети базовых станций RTK ровер и центральный сервер (через базовые станции) наблюдают одно и то же созвездие спутников; используя соответствующий алгоритм, центральный сервер разрешает неоднозначность фазовых измерений на базовых станциях сети; сервер формирует и передает RTK поправки роверу; затем ровер использует RTK поправки для получения RTK решения.
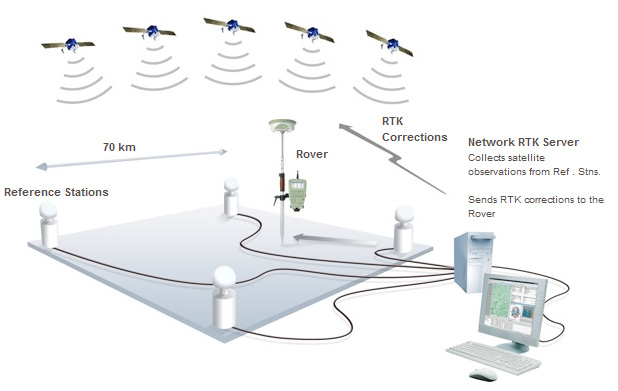 Рис. 2.17 Принцип работы сети базовых станций RTK
Рис. 2.17 Принцип работы сети базовых станций RTK
Ровер подключается к центральному серверу с использованием односторонней или двухсторонней линии связи (радиомодем, GSM соединение или Интернет). Как только ровер получает RTK-данные, он вычисляет свое местоположение, используя соответствующий алгоритм. Какой алгоритм использует ровер, и как минимизируются ошибки за расстояние, зависит от применяемого метода сетевого RTK.
В методах МАХ и VRS выполняется минимизация ошибок с использованием различных концепций. В зависимости от выбранного метода данный процесс моделирования выполняется или центральным сервером или непосредственно ровером. В отличие от них старейший способ Flachen-Korrektur Parameter (FKP, метод площадных поправок), разработанный в середине 1990 годов, требует, чтобы ровер передавал свои приближенные координаты в центр управления сетью. Сервер рассчитывает и передает пользователю данные от одной из базовых станций и коэффициенты зависимости ошибок от расстояния. Эти коэффициенты вычисляются, исходя из предположения, что ошибки изменяются линейно с увеличением расстояния от базовой станции. Такие поправки могут применяться в ограниченной области и не всегда обеспечивают должное качество позиционирования.
К достоинствам сетевого RTK можно отнести отсутствие необходимости в установке временных базовых станций на исходных пунктах; равноточное определение координат ровера; обеспечение высокоточных результатов при значительных расстояниях между базовыми станциями и ровером; использование меньшего количества станций для покрытия одной и той же территории по сравнению с количеством станций при использовании обычного RTK; более высокая надежность и доступность получения RTK-поправок (даже если одна из базовых станций перестает функционировать, другая станция продолжает поддерживать работу ровера).
Способы формирования RTK-поправок должны быть стандартизованными, опирающимися на опубликованные алгоритмы. Это гарантирует, что информация, получаемая роверами от сети, не зависит от производителя оборудования и соответствует международным стандартам.
Если ровер способен выбирать, данные скольких и каких базовых станций будут использованы для получения решения, какую методику применить для уменьшения ошибок, будет получено решение, управляемое ровером. Преимущество такого подхода в том, что ровер может постоянно оценивать точность получаемого RTK-решения и следить за эффективностью дифференциальной коррекции. Ровер также может выбрать другую стратегию коррекции и получить более подходящее сетевое решение. Когда сервер управляет сетевым решением, он применяет одну стратегию для всех роверов. Чтобы обеспечить роверу возможность максимально эффективно и точно вычислять собственные координаты, метод формирования сетевых RTK-поправок должен использовать все доступные спутниковые данные. Поэтому важным является возможность сети и роверов принимать данные GPS, ГЛОНАСС, Galileo.
Условия взаимодействия сети и ровера:
§ наблюдение одних и тех же спутников. Ровер и сервер (посредством базовых станций) должны наблюдать общий набор спутников;
§ разрешение сетевой неоднозначности. На основе соответствующего алгоритма сервер разрешает сетевую неоднозначность и уменьшает спутниковые данные до этой общей неоднозначности;
§ формирование RTK-поправок. Сервер формирует и передает поправки роверу в стандартном и нестандартном видах;
§ RTK-решение. Ровер использует поправки для вычисления собственных координат в режиме реального времени.
Заявляемые производителями и подтвержденные опытом работ преимущества технологии RTK сомнений не вызывают. Однако ряд вопросов, касающихся как технологического характера, так и точности определения пространственных координат, порождает множество дискуссий при выборе метода для проведения геодезических работ различного назначения и класса точности.
К таковым можно отнести следующие основные позиции:
§ влияние качества исходных координат пунктов опорных геодезических сетей (как государственных, так и ведомственных);
§ наличие нескольких местных (региональных) плоских прямоугольных систем координат и недоступность сведений о параметрах их задания;
§ эффективность использования мультисистемных спутниковых приемников глобальных навигационных спутниковых систем (ГНСС) GPS и ГЛОНАСС;
§ специфика работы в сложных условиях (застроенная или покрытая густой растительностью территория);
§ необходимость строгого соблюдения требований нормативных документов и методических рекомендаций при измерениях.
ЮУрГУ
Референц-станция ЮУрГУ была установлена в 2013 году. Для размещения референц-станции была выбрана крыша 10-ти этажного здания, 3 учебного корпус ЮУрГУ, расположенного по адресу: г.Челябинск, пр. Ленина, д.87 (рис. 2.1). Установка осуществлялась в соответствии с «Рекомендации по размещению и эксплуатации постоянно действующих референсных станций».
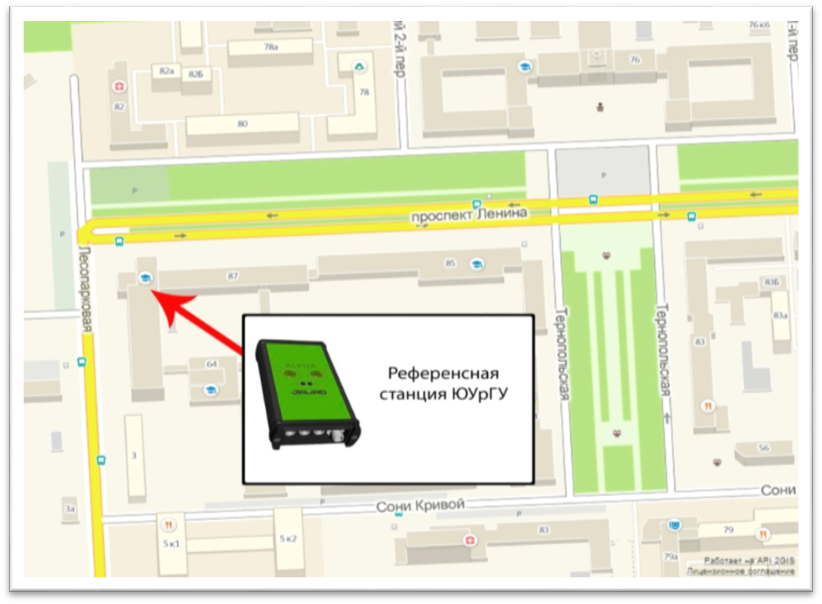
Рисунок 2.1 – Расположение референц станции
Привязка и уравнивание референц-станции на территории города Челябинска выполнена в местной системе координат МСК-74 и Балтийской системе высот 77 года. Установка референц-станции проводилась согласно Рекомендациям по размещению и эксплуатации постоянно действующих референц-станций (CODS) (международный стандарт), эксплуатируемой геодезической службой (NGS) NOAA (США).
Для установки базовой станции предъявляются следующие требования:
1. согласованный доступ на место установки антенны (антенна должна быть размещена под открытым небосводом, с ограниченным доступом к ней). Место установки антенны показано на рисунке 2.2;

Рисунок 2.2 – Крепление антенны
2. необходимо заранее предусмотреть возможные варианты прокладки коаксиального кабеля от антенны к приемнику;
3. местоположение антенны не должно превышать 30м от базового приемника (ограниченно кабелем);
4. отдельное рабочее место с безлимитным доступом в Интернет и выделенным статическим IP-адресом, для непосредственного подключения к нему базового приемника;
5. доступ к сетевому питанию – 2 розетки по 220В 50Hz;
6. оборудованное рабочее место;
7. рабочее место должно использоваться именно под базовую станцию, для исключения помех в работе в режиме реального времени.
Схема установки референц-станции ЮУрГУ представлена на рисунке.
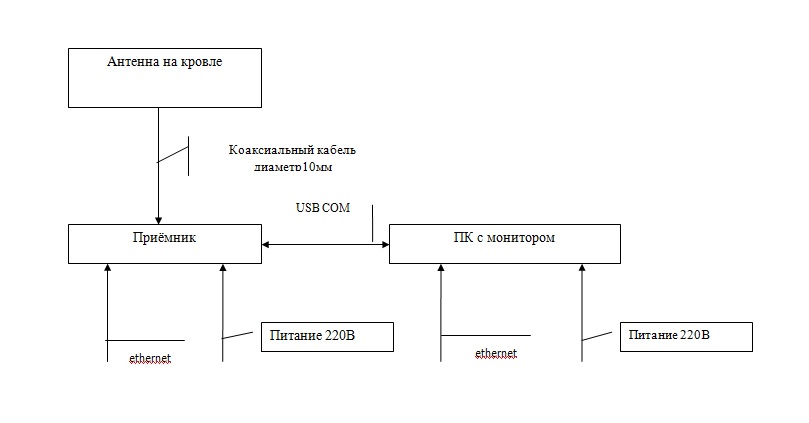
Рисунок – Схема установки референц-станции
Для размещения Базовых станций RTK обследуются пункты государственной геодезической сети в системе координат МСК-74 в Челябинском городском округе. Затем проведены работы по подготовке пунктов к проведению спутниковых наблюдений.
По результатам обследования пунктов ГГС составлен рабочий проект размещения спутниковых геодезических приемников для уравнивания базовой референц-станции.
Наблюдения на пунктах ГГС и местах установки базовых станций выполняются GNSS-приемниками прошедшими метрологическую поверку в соответствии с требованиями и рекомендациями[8].
Установка антенны спутникового приемника над центром пункта, не имеющего устройства для принудительного центрирования, осуществлялись с применением поверенных и отъюстированных оптических центриров с точностью 1 мм.
Спутниковые наблюдения на пунктах ГГС выполняются с использованием статического режима при различных расстановках приемников, продолжительность синхронных наблюдений на пунктах сети, при расстояниях между смежными пунктами до 50 км, производилось не менее 0,5 часа.
Дата добавления: 2016-11-26; просмотров: 12380;
Поиск по сайту
Узнать еще
- WORLD-WIDE-WEB (Всемирная информационная сеть)
- Аналогия явления переноса субстанций. Законы молекулярного переноса
- Асинхронный RS-тpиггеp, реализация на базовых логических элементах И-НЕ,ИЛИ-HЕ. RS-тpиггеp для подавления дребезга контактов.
- Астрономо-геодезическая сеть (АГС)
- Б) Нивелирная сеть местного значения
- Базовая аппаратная конфигурация
- Базовая конфигурация коммутатора
- Базовая конфигурация персонального компьютера

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
