Классификация САУ и законы управления
САУ можно классифицировать по классам и принципам действия.
По классам дифференциальных уравнений:
Линейными системами называются систмы, описываемые линейными дифференциальными уравнениями, в противном случае система входит в класс нелинейных. Линейные и нелинейные дискретные системы описываются соответсвеннно линейными и нелинейными разностными уравнениями или системами разностных уравнений.
Линейные и нелинейные стационарные системы описываются дифференциальными уравнениями с постояными коэффициентами, а нестационарные системы с переменными коэффициентами.
Сосредоточенные системы или системы со средоточенными параметрами, описываются обыкновенными дифференциальными уравнениями.
Распределенныесистемы или системы с распределенными параметрами, описываются дифференциальными уравнениями в частных производных.
Существуют два закона управления: по отклонению выходной велины и по возмущению.
САУ по отклонению – принцип И.И.Ползунова, предложенная им в 1765г. В настоящее время используется в 90% промышленных САУ.
Достоинством САУ по отклонению является то, что она компенсирует влияние любого возмущающего воздействия, которое вызвало изменение значения ее выходного сигнала у от заданного значения. Это изменение фиксирует датчик и через цепь отрицательной обратной связи, сигнал контролируемого параметра поступает на вход сравнивающего устрйства, которое, в свою очередь, вырабатывает сигнал отклонения ε = х - хос , поступающего на регулятор (рисунок 1.3). Недостаток состоит в том, что сначала должно появиться отклонение ε выходного сигнала у (параметра) от заданного ззначения и только затем регулятор компенсирует возмущающе воздействие.
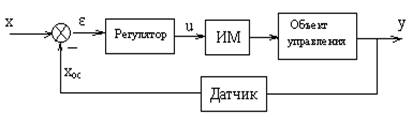
Рисунок 1.3 - Структурная схема САУ по отклонению
САУ по возмущению – принцип Ж.Понселе, предложеннй им в 1830г. Если f возмущающее действие на объект, его измеряют и подают на регулятор для сравнения с заданным значением и выработки управляющего сигнала, изменяющего значение входного сигнала (рисунок 1.4).
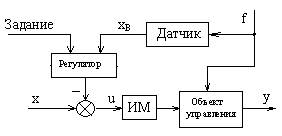
Рисунок 1.4 - Структурная схема САУ по возмущению
При таком принципе управления изменение возмущающего воздействия компенсируется регулятором до того, как оно нарушит технологический режим работы объекта. Однако есть существенный недостаток – неспособность компенсировать влияние других возмущающих воздействий.
САУ по возмущению является разомкнутой, т.е. без обратной связи по выходному сигналу.
Комбинированные САУ совмещают оба закона управления и лишены многих недостатков рассмотренных схем (рисунок 1.5).
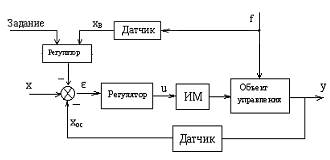
Рисунок 1.5 - Структурная схема комбинированной САУ
По закону изменения выходного сигнала задатчика различают САУ стабилизации, программные и следящие.
По закону изменения выходного сигнала регулятораразличают САУ дискретные (двух, трехпозиционные) и непрерывные (аналоговые).
Двухпозиционные (вкл. – выкл.) САУ надежны (холодильные установки), дешевы, но мала точность регулирования.
Дата добавления: 2016-11-04; просмотров: 3040;
Поиск по сайту
Узнать еще
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- CRM - стратегия управления взаимоотношениями с клиентом
- I. КЛАССИФИКАЦИЯ ПО ИСПОЛЬЗОВАНИЮ.
- I. Классификация углеводов.
- I.1.4 ИДЕАЛЬНЫЙ ГАЗ. ГАЗОВЫЕ ЗАКОНЫ. УРАВНЕНИЕ СОСТОЯНИЯ ИДЕАЛЬНОГО ГАЗА
- I.4. Классификация групп крови
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II.1.1 ОСНОВНЫЕ ЗАКОНЫ И ФОРМУЛЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
