Характеристики и режимы при последовательном возбуждении
В электроприводах постоянного тока иногда используются двигатели с последовательным возбуждением, когда специально выполненная обмотка возбуждения включена последовательно с обмоткой якоря - рис. 3.6
Рис. 3.6. Схема двигателя постоянного тока последовательного
возбуждения
Для двигателя последовательного возбуждения, как и для других двигателей постоянного тока при питании якоря от источника напряжения (U=const), справедливы уравнения (3.4) и (3.5), однако, если для двигателя независимого возбуждения поток не зависит от тока нагрузки, то для двигателя последовательного возбуждения поток является функцией тока нагрузки.
Зависимость Ф = j(I) - характеристика намагничивания - не имеет простого аналитического выражения, ее примерный вид изображен на рис. 3.7.
Рис. 3.7. Характеристика намагничивания машины постоянного тока
В первом приближении зависимость между скоростью двигателя и развиваемым им моментом в установившемся режиме можно найти в предположении, что поток возбуждения и ток в якоре двигателя связаны между собой линейной зависимостью (пунктир на рис. 3.7):
 .
.
Тогда
 ,
,
а поскольку
M = kФI = kaI2,
то
 .
.
Таким образом, при сделанном допущении механическая характеристика двигателя последовательного возбуждения изображается гиперболой (рис. 3.8); одной из ее асимптот является ось ординат, а другой - прямая, параллельная оси абсцисс,
 .
.
Рис. 3.8. Механическая характеристика двигателя последовательного
возбуждения
Жесткость механической характеристики  двигателя последовательного возбуждения переменна и возрастает с увеличением нагрузки.
двигателя последовательного возбуждения переменна и возрастает с увеличением нагрузки.
Полученные уравнения дают лишь общее представление о характеристиках электропривода с двигателем последовательного возбуждения, так как в действительности магнитная система машины насыщена и кривая намагничивания весьма далека от прямой. Поэтому в практических целях обычно пользуются универсальными характеристиками для серии машин - рис. 3.9, построенными в относительных величинах  и
и  , Iн и Мн - номинальные величины двигателя, Rдоп = 0.
, Iн и Мн - номинальные величины двигателя, Rдоп = 0.
Рис. 3.9. Характеристики двигателя последовательного возбуждения в
относительных величинах
Электропривод с двигателями последовательного возбуждения в нормальной схеме (U=const) может работать в тех же энергетических режимах, что и привод с двигателями независимого возбуждения, за исключением режима идеального холостого хода и генераторного режима параллельно с сетью (рекуперативное торможение), поскольку при нагрузке, стремящейся к нулю, к нулю стремится и магнитный поток, ось  - асимптота механической характеристики.
- асимптота механической характеристики.
Некоторые особенности при последовательном возбуждении имеет режим динамического торможения.
Если якорь вращающейся машины отключить от источника напряжения и замкнуть на внешний резистор (рис. 3.10, схема слева), то под действием потока остаточного магнетизма (Фост на рис. 3.7) в проводниках якоря возникает некоторая ЭДС Еост, которая вызовет в замкнутой цепи ток. Этот ток, протекая по обмотке возбуждения в обратном против исходного направления размагнитит машину (Ф = 0) и тормозного момента создано не будет.
Рис. 3.10. К режиму динамического торможения с самовозбуждением
Для того, чтобы получить тормозной момент, ток, созданный Еост, должен протекать в том же, что и раньше, направлении, усиливая магнитный поток, т.е. создавая самовозбуждение. Это условие выполнится, если при переходе на режим торможения переключить обмотку возбуждения как показано на рис. 3.10, схема справа.
Ток, создаваемый увеличивающейся ЭДС, изменит знак, момент будет направлен против движения, т.е. станет тормозным.
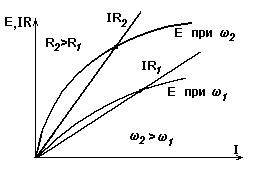
Работа машины постоянного тока с самовозбуждением возможна лишь при определенных условиях, а именно при таких значениях скорости и сопротивления R цепи якоря, чтобы имело место равенство
E = IR, (3.11)
Существованию этого равенства отвечает наличие точки пересечения кривых  (при данной скорости) и прямой IR = f(I) - рис. 3.11. Очевидно, что чем больше R, тем при большей скорости произойдет самовозбуждение машины.
(при данной скорости) и прямой IR = f(I) - рис. 3.11. Очевидно, что чем больше R, тем при большей скорости произойдет самовозбуждение машины.
а) б)
Рис. 3.11. Характеристики динамического торможения с
самовозбуждением
Наименьшая скорость, при которой машина может самовозбуждаться, будет при Rдоб = 0, то есть при замкнутой накоротко якорной цепи машины.
Построение механической характеристики в режиме динамического торможения при самовозбуждении можно произвести, исходя из уравнения баланса мощностей.
Мощность, развиваемая двигателем в режиме динамического торможения, целиком рассеивается в сопротивлениях якорного контура, то есть
(-I)2R = - Mw,
откуда
 . (3.12)
. (3.12)
Зная R и задаваясь током I, по универсальной характеристике определяют соответствующий этому току момент М, вычисляют скорость  и т.д. Характер зависимой
и т.д. Характер зависимой  в тормозном режиме при самовозбуждении изображен на рис. 3.11,б.
в тормозном режиме при самовозбуждении изображен на рис. 3.11,б.
В электроприводах постоянного тока иногда используются двигатели смешанного возбуждения, имеющие две обмотки возбуждения, одна из которых включена последовательно в якорную цепь, а другая имеет независимое питание.
Двигатели последовательного возбуждения могут получать питание не только от источника напряжения, что было рассмотрено выше, но и от источника тока. Поскольку при этом магнитный поток будет неизменным, сохраняются и основные свойства электропривода, рассмотренные ранее.
Дата добавления: 2016-11-04; просмотров: 1764;
Поиск по сайту
Узнать еще
- Appeal –привлекательность.
- Applications (приложения)
- Cила резания при точении
- Cущность организации и ее основные признаки
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- D-элементы, их применение в медицине и фармации.
- F50 Расстройства приема пищи
- He рекомендуем использовать данный метод, если в дальнейшем будет необходимость прибегнуть к отгибу приборной панели.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
