Регулятор; 2 – компенсатор.
Обычно ограничиваются частичной инвариантностью по отношению к наиболее опасным возмущениям. Рассмотрим условия инвариантности разомкнутой и комбинированной систем регулирования по отношению к одному возмущающему воздействию.
Условия инвариантности разомкнутой и комбинированной АСР.
Рассмотрим условия инвариантности разомкнутой системы (Рис.3.31): у(t)=0.
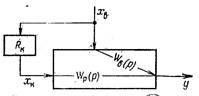
Рис. 3.31 Структурная схема разомкнутой АСР.
Переходя к изображению по Лапласу Хв(р) и Y(p) сигналов хв(t) и у(t), перепишем это условие с учетом передаточных функций объекта по каналам возмущения Wв(p) и регулирования Wр(p) и компенсатора Rк(р):
Y(p)= Хв(р)[ Wв(p)+ Rк(р) Wр(p)]=0 (3.46)
При наличие возмущения [Хв(р) ≠ 0] условия инвариантности (3.46) выполняется, если
Wв(p)+ Rк(р) Wр(p) ≡0 (3.47)
откуда Rк(р)= − Wв(p)/ Wр(p). (З.48)
Таким образом, для обеспечения инвариантности системы регулирования по отношению к какому-либо возмущению необходимо установить динамический компенсатор, передаточная функция которого равна отношению передаточных функций объекта по каналам возмущения и регулирования, взятому с обратным знаком.
Условия физической реализуемост инвариантных АСР.Одной из основных проблем возникающих при построение инвариантных систем регулирования, является их физическая реализуемость т.е. реализуемость компенсатора, отвечающего условию (3.48).
В отличие от обычных промышленных регуляторов, структура которых задана и требуется лишь рассчитать их настройки, структура динамического компенсатора полностью определяется соотношением динамических характеристик объекта по каналам возмущения и регулирования и может оказаться очень сложной, а при неблагоприятном соотношении этих характеристик – физически нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в следующих двух случаях.
1. Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения. В этом случае идеальный компенсатор должен содержать звено упреждения.
2. Если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья. Такой результат получается при определенном соотношение порядков дифференциальных уравнений, описывающих каналы возмущения и регулирования.
Техническая реализация инвариантных АСР.При практической реализации разомкнутых и комбинированных АСР обычно добиваются приближенной инвариантности системы по отношению к рассматриваемому возмущению в наиболее опасном диапазоне частот. При этом реальный компенсатор выбирают из числа наиболее легко реализуемых динамических звеньев, параметры которых рассчитываются из условия близости частотных характеристик идеального [Rк(jω)] и реального [Řк(jω)] компенсаторов в этом диапазоне частот.
3.9.2. Каскадные АСР
Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в систему регулирования (рис 3.32) включают два регулятора – основной (внешний) регулятор, служащий для стабилизации основного выхода объекта у, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты у1.заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.
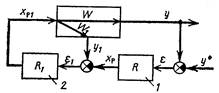
Рис 3.32. Структурная схема АСР.
Выбор законов регулирования определяется назначением регуляторов:
для поддержания основной выходной координаты на заданном значении без статической ошибки закон регулирования основного регулятора должен включать интегральную составляющую.
от вспомогательного регулятора требуется прежде всего быстродействие, поэтому он может иметь любой закон регулирования (в частности пропорциональный как наиболее простой и достаточно быстродействующий).
Сравнение одноконтурных и каскадных АСР показывает, что вследствие более высокого быстродействия внутреннего контура в каскадной АСР повышается качество переходного процесса, особенно при компенсации возмущений, поступающих по каналу регулирования (как будет показано ниже, при этом инерционность эквивалентного объекта благодаря внутреннему контуру снижается по сравнению с инерционностью основного канала регулирования).
Если по условию ведения процесса на вспомогательную переменную накладывается ограничение (например, температура не должна превышать предельно допустимого значения или соотношение расходов должно лежать в определенных пределах), то на выходной сигнал основного регулятора, который является заданием для вспомогательного регулятора, также накладывается ограничение. Для этого между регуляторами устанавливается устройство с характеристиками усилительного звена с насыщением.
Примеры каскадных АСР технологических объектов. На рис 3.33 приведен пример каскадной системы стабилизации температуры жидкости на выходе из теплообменника, в которой вспомогательным контуром является АСР расхода греющего пара. При возмущении по давлению пара регулятор 1 изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданный расход. При нарушении теплового баланса в аппарате (вызванном, например, изменение входной температуры или расхода жидкости, энтальпии пара, потерь тепла в окружающую среду), приводящем к отклонению выходной температуры от заданного значения, регулятор температуры 2 корректирует задание регулятору расхода 1.
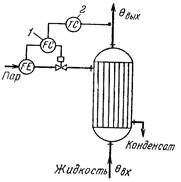
Рис. 3.33. Каскадная система регулирования температуры (2)
с коррекцией задания регулятору расхода пара (1).
В химико-технологических процессах часто основная и вспомогательная координаты имеют одинаковую физическую природу и характеризуют значение одного и того же технологического параметра в разных точках системы (рис. 3.34).
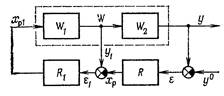
Рис.3.34. Структурная схема каскадной АСР
с измерением вспомогательной координаты в промежуточной точке
На рис 3.35 показан фрагмент технологической схемы, включающий подогреватель реакционной смеси и реактор, и система стабилизации температуры в реакторе. Регулирующее воздействие – расход пара – подается на вход теплообменника. Канал регулирования, включающий два аппарата и трубопроводы, является сложной динамической системой с большой инерционностью. На объект действует ряд возмущений, поступающих в разные точки системы, - давление и энтальпия пара, температура и расход реакционной смеси, потери тепла в реакторе и т.п. Для повышения быстродействия системы регулирования применяют каскадную АСР, в которой основной регулируемой переменной является температура в реакторе между теплообменником и реактором.
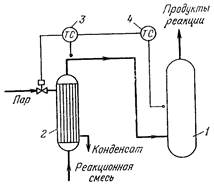
Рис 3.35. Каскадная система регулирования температуры (4) в реакторе (1)
с коррекцией задания регулятору температуры (3) на входе теплообмена (2)
Системы связанного регулирования. Автономные АСР.Основой построения систем связанного регулирования является принцип автономности. Применительно к объекту с двумя входами и выходами понятие автономности означает взаимную независимостью выходных координат у1 и у2 при работе двух замкнутых систем регулирования.
По существу, условие автономности складывается из двух условий инвариантности: инвариантности первого выхода у1 по отношению к сигналу второго регулятора хР2 и инвариантности второго выхода у2 по отношению к сигналу первого регулятора хР1:
у1 (t, хР2)=0; у2 (t, хР12)=0; Vt, хР1, хР2
При этом сигнал хР1 можно рассматривать как возмущение для у2, а сигнал хР2. - как возмущения для у1 .
В химической технологии одним из самых сложных многосвязных объектов является процесс ректификации. Даже в простейших случаях – при разделении бинарных смесей – в ректификационной колонне можно выделить несколько взаимосвязанных координат (рис. 3.36).
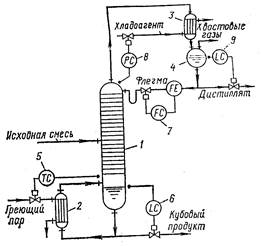
Рис. 3.36. Пример системы регулирования объекта с несколькими входами и выходами:
1- ректификационная колонна; 2 – кипятильник; 3 – дефлегматор;
4 – флегмовая емкость; 5 – регулятор температуры; 6, 9 – регуляторы уровня;
7 – регулятор расхода; 8 – регулятор давления.
Например, для регулирования процесса в нижней части колонны необходима стабилизация минимум двух технологических параметров, характеризующих материальный баланс по жидкой фазе и по одному из компонентов. Для этой цели обычно выбирают уровень жидкости в кубе и температуру под первой тарелкой, а в качестве регулирующих входных сигналов – расход греющего пара и отбор кубового продукта. Однако каждое из регулирующих воздействий влияет на оба выхода: при изменении расхода греющего пара изменяется интенсивность испарения кубового продукта, а вследствие этого – уровень жидкости и состав пара. Аналогично изменение отбора кубового продукта влияет не только на уровень в кубе, но и на флегмовое число, что приводит к изменению состава пара в нижней части колоны.
Для регулирования процесса в верхней части в качестве выходных координат можно выбрать давление и температуру выходных координат можно выбрать давление и температуру пара, а в качестве регулирующих входных параметров - подачу хладоагента в дефлегматор и флегмы на орошение колонны. Очевидно, обе входные координаты влияют на давление и температуру в колонне в ходе тепловых и массообменных процессов.
Наконец, рассматривая систему регулирования температуры одновременно в верхней и нижней частях колонны подачей соответственно флегмы и греющего пара, также получим систему несвязанного регулирования объекта с внутренними перекрестными связями.
Дата добавления: 2021-02-19; просмотров: 925;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
