Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя определяется формулой
 , (57)
, (57)
 . (57а)
. (57а)
из которой следует три принципиально возможных метода регулирования скорости асинхронных двигателей: изменением частоты  питающего напряжения, числа пар полюсов
питающего напряжения, числа пар полюсов  и величины скольжения
и величины скольжения  .
.
Частотное регулирование. Этот способ регулирования скорости позволяет применять наиболее надежные и дешевые асинхронные двигателя с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего можно использовать: синхронный генератор с переменной частотой вращения; преобразователи частоты: электромашинные или статические, выполненные на полупроводниковых тиристорах или силовых транзисторах.
При частотном регулировании скорости можно регулировать вниз от  (номинальной скорости) и вверх от номинальной. При регулировании скорости вниз от номинальной с изменением частоты изменяют подводимое напряжение
(номинальной скорости) и вверх от номинальной. При регулировании скорости вниз от номинальной с изменением частоты изменяют подводимое напряжение  ; при этом магнитный поток
; при этом магнитный поток  остаётся неизменным. Графики механических характеристик представлены на рис, 73.
остаётся неизменным. Графики механических характеристик представлены на рис, 73.
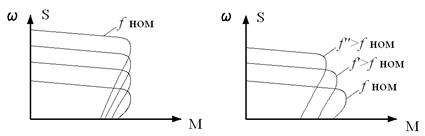







Рис. 73. Механические характеристики
Регулирование путем изменения числа пар полюсов. Такое регулирование позволяет получить ступенчатое изменение частоты вращения. На рис. 74 показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в два раза. Для этой цели каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. Из рисунка видно, что при включении катушек в две параллельные ветви число полюсов уменьшается в два раза, а следовательно, частота вращения магнитного поля в два раза увеличивается.
а) б)
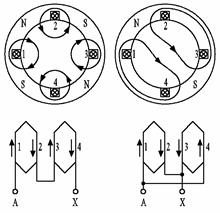
Рис. 74. Схема переключения обмотки статора для изменения числа полюсов:
а – при 2р=4, б – при 2р=2.
При переключении число последовательно включенных витков в каждой фазе уменьшается вдвое, но так как частота вращения возрастает в два раза, ЭДС, индуктированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно две частоты. Асинхронные двигатели с переключением числа полюсов называют многоскоростными.
Регулирование скорости изменением скольжения, осуществляется:
а) путем включения в цепь ротора добавочного активного сопротивления (рис. 75). Этот способ регулирования может быть использован только для двигателя с фазным ротором. Он позволяет плавно изменять частоту вращения в широкий пределах.
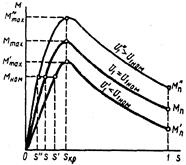
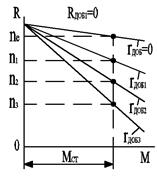
Рис. 75. Изменение формы механической характеристики при регулировании
частоты вращения с помощью добавочного сопротивления
Недостатками его являются:
1) большие потери энергии в регулировочном реостате;
2) чрезвычайно "мягкая" механическая характеристика двигателя при большом сопротивлении в цепи ротора. В некоторых случаях последнее является недопустимым, так как небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения.
б) регулирование путем изменения величины питающего напряжения в небольшом диапазоне.
Дата добавления: 2016-10-18; просмотров: 3931;
Поиск по сайту
Узнать еще
- I.3.4 ВЗАИМНЫЕ ПРЕВРАЩЕНИЯ ЖИДКОСТЕЙ И ГАЗОВ
- VI. Гемецеллюлозы и их превращения.
- VII. Регулирование частоты вращения двигателя
- Автоматизированный асинхронный электропривод с использованием синхронных электромашинных преобразователей частоты.
- Автоматизированный электропривод переменного тока с непосредственным преобразованием частоты (НПЧ).
- АВТОМАТИЧЕСКАЯ подстройка частоты гетеродина
- Автоматическое регулирование (РОУ) редукционно-охладительных установок.
- Автоматическое регулирование в области дуговой сварки

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
