ПРИМЕНЕНИЕ АВТОМАТИЗИРОВАННЫХ НАВИГАЦИОННЫХ КОМПЛЕКСОВ 5 глава
С выхода системы мы получаем сигнал X, равный сумме сигналов X1 и Х2, где Х1 — выходной сигнал от неавтономного радиотехнического устройства (Z+f), а Х2 — выходной сигнал от автономного источника навигационной информации (Z+α).

для суммы выходных сигналов X=X1+X2 получим соотношение

Имея в виду, что передаточные функции для входов 1 и 2 равны соответственно
Таким образом, фильтр выделяет сигнал Z, в котором частично остаются помеха f, подавленная фильтром низших частот, и ошибка а, срезанная фильтром высших частот.
Корректирующие линейные и нелинейные фильтры могут быть использованы для коррекции любых автономных навигационных систем. Однако считается целесообразным применять их в комбинированных системах, где радиотехническое устройство несет высокий уровень помех, а автономное интенсивно накапливает большие ошибки за сравнительно короткое время. В частности, этот способ коррекции применим в комбинированной системе, состоящей из АНК, основанном на счислении пути V и ψ, корректируемого радиолокационным визиром.

Схема коррекции в такой комбинированной системе показана на рис. 27. Здесь АНК выдает координаты места самолета в ортодромической системе координат X, Y. На выходе АНК вследствие неучета ветра и погрешности измерения V, ψ получим вместо истинных координат места самолета X, Y счислимые координаты Хс = X + Ux/p и YC = Y + Uy/p, где Uх и Uy —составляющие так называемого „фиктивного" ветра по осям X и Y.
Нарастающие со времени погрешности измерения координат (Ux/p и Uy/p) могут быть устранены применением указанной схемы коррекции, в которой сигналы координат, вычисленных навигационным автоматическим координатором (Хс, Ус), сравнивается с несущими высокочастотную помеху f сигналами координат (Хр, Ур), измеренных радиолокационным визиром с самолета или определенных с помощью радиолокатора с земли. Выходные сигналы после коррекции имеют величину
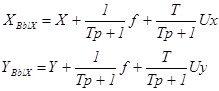
Таким образом, на выходе комбинированной системы выделяются сигналы X и Y; при этом помеха f подавляется фильтром низших частот, но появляется ошибка, пропорциональная составляющим ветра и постоянной времени Т. В данном случае неминуемо насыщение интеграторов АНК, поскольку ошибка из-за неучета ветра все время нарастает. Этот недостаток устраняют, используя другие схемы коррекции, в частности, схемы с двумя интеграторами.

Что касается автоматической логической коррекции, то она осуществляется на основании сигналов коррекции, вводимых оператором вручную. Оператор, наблюдая за изменяющейся ошибкой, оценивает достоверность корректирующих сигналов и затем вводит поправку в счислимые координаты и в величину скорости ветра, принятой для счисления.
В этой системе (Рис. 28) автоматически оценивается правильность навигационных данных, полученных от двух источников информации, и определяется относительное значение корректирующего сигнала, пропорциональное его достоверности. Это достигается сравнением данных радиокоррекции с данными счисления пути следующим образом. Допустим, что точность счисления пути составляет 5%. Если самолет, оборудованный указанной системой, начинает полет со скоростью 800 км/час, то спустя 6 мин его счетно-решающее устройство счисления пути выдаст сигнал о том, что самолет пролетел 80 км по заданному направлению. Учитывая погрешности счисления пути, система показывает, что ошибка счисления места самолета не превышает 4 км. Следовательно, самолет может находиться на расстоянии 76 или 84 км от начальной точки. Одновременно система рассчитывает положение самолета с помощью сигналов корректирующей радиоаппаратуры. Если из этих показаний следует, что самолет находится, например, на расстоянии 78 км от начальной точки, то расхождение в 2 км между показаниями прибора счисления пути и показаниями радиоустройств находится в пределах возможных ошибок счетно-решающего устройства счисления пути. В этом случае система считает радиосигналы правильными и корректирует положение, рассчитанное по прибору счисления пути, показывая 78 км вместо прежних 80 км.
Пусть теперь при полете со скоростью 1000 км/час счетно-решающее устройство счисления пути, спустя 6 мин после вылета, определяет, что самолет пролетел от начальной точки 158 км. Вследствие того, что прибор счисления пути накапливает ошибки с момента последнего определения, действительный путь, пройденный самолетом, может быть 150,1 или 165,9 км от начальной точки. Предположим, что согласно данным радиокоррекции самолет находится на расстоянии 175,9 км от этой точки. Расхождение в 10 км показывает, что с момента определения последнего местоположения самолет или снесло попутным ветром, или имеются большие погрешности в сигналах радиокоррекции. Поэтому система должна только запомнить данные местоположения самолета, определенные по радионавигационным станциям, а не использовать их для коррекции. Несколько позже система снова определяет местоположение самолета по радионавигационным станциям. Если при этом опять выявится расхождение в 10 км, то достоверность радиосигнала возрастает. Если повторные измерения дают аналогичный результат, то показания счисления пути считаются ошибочными, возможно, в результате влияния попутного ветра, и при коррекции показаний системы в счетно-решающее устройство счисления пути вводится поправка на скорость попутного ветра.
Практически в системе применяется другой метод определения и оценки правильности поступающих извне радиосигналов. Если радиосигналы поступают непрерывно, то любые внезапные большие расхождения между позиционными показаниями, рассчитанными путем счисления и полученными от радионавигационных устройств, достаточны для того, чтобы отбросить данные радионавигационных устройств. При поступлении радиосигналов с интервалами в несколько минут большие расхождения в значениях координат уже не будут считаться ошибочными.
 Система вырабатывает коэффициент надежности в отношении расхождений, которые являются функцией величины расхождения, продолжительности времени
Система вырабатывает коэффициент надежности в отношении расхождений, которые являются функцией величины расхождения, продолжительности времени
после последней коррекции, точности счетно-решающего устройства при счислении пути и данных радионавигационных средств, используемых в качестве источника внешнего сигнала.
 Система предусматривает распознавание и быстрый прием радиоданных, которые мало расходятся с рассчитанными позиционными данными, и задерживает прием радиосигналов с большими расхождениями до тех пор, пока следующие проверки не подтвердят их правильность. Для этого данные коррекции вводятся через интеграторы, постоянные времени которых велики по сравнению с интервалами времени между моментами получения данных.
Система предусматривает распознавание и быстрый прием радиоданных, которые мало расходятся с рассчитанными позиционными данными, и задерживает прием радиосигналов с большими расхождениями до тех пор, пока следующие проверки не подтвердят их правильность. Для этого данные коррекции вводятся через интеграторы, постоянные времени которых велики по сравнению с интервалами времени между моментами получения данных.
Система помехоустойчива, она не реагирует на случайные или ложные сигналы из-за большой постоянной времени интеграторов. Чтобы создать активные помехи действию системы требуется весьма сложное оборудование.
Проиллюстрируем работу такой системы на примере схемы «Скен» (Рис. 29). Входные сигналы курса ψ и скорости V поступают на преобразователь координат — раскладчик, после которого сигналы, пропорциональные составляющим скорости по выбранным направлениям, подаются на интеграторы. С выхода интеграторов снимаются сигналы, пропорциональные пройденному самолетом пути по двум направлениям. После алгебраического сложения их с сигналами, пропорциональными координатам пункта вылета или цели, сумма поступает на преобразователь координат. После преобразователя данные местоположения самолета будут представлены в полярных координатах — величинами азимута и расстояния от точки взлета или места назначения. Сигналы, получаемые от радионавигационных средств и указывающие азимут Ар и дальность Rp самолета от известной станции, вводятся в систему и автоматически вычитаются из вычисленных данных местоположения по НАК. Погрешности измерения скорости и курса подаются на фильтр сигналов для определения их достоверности (фактической надежности) и после проверки интегрируются, чтобы установить возможность введения поправки на V и ψ.
Использование в каждой ветви схемы двух интеграторов обеспечивает не только фильтрацию шума или случайных сигналов, но и запоминание значения скорости для точных вычислений в те периоды времени, когда радиокоррекция невозможна.
При устойчивом боковом ветре появится начальное расхождение между вычисленными данными и данными, определенными по радиосигналам. Выходной интегратор выдает напряжение, пропорциональное боковому ветру, которое подается через цепь обратной связи на вход схемы ввода данных курса и скорости. Если система теряет радиосигнал, интегратор выдает прежние данные до возобновления приема радиосигналов.
Рассмотренная система может быть изменена. Например, вместо АНК, работающего по сигналам V и ψ, можно использовать АНК, работающий от доплеровского измерителя путевой скорости и угла сноса, или инерциальный АНК. В качестве корректора могут быть использованы не только азимутально-дальномерные устройства, но и разностно-дальномерные, дальномерные или фазовые устройства, а также наземные радиолокаторы, с которых данные о положении самолета передаются на самолет по линиям радиосвязи.
Комбинированная система инерциальной навигации в сочетании с доплеровским измерителем W и УС
В рассматриваемой комбинированной системе (Рис. 30) результат измерения путевой скорости WД с помощью радиолокационного измерителя 5 сравнивается устройством сравнения 6 с величиной путевой скорости Wист, вычисленной инерциальной системой с ошибками, содержащими постоянные составляющие и составляющие, изменяющиеся с периодом Шулера.

Инерциальная часть системы условно представлена площадкой с акселерометрами 1, двумя интеграторами 2 и 3. преобразователем координат 4 и указателем географических координат φ, λ. При наличии установившейся разницы в величинах скоростей во второй интегратор вводится компенсирующее смещение.
Во время полета самолета в условиях, когда радиолокационный измеритель может работать непрерывно, последний используется в качестве основного датчика скорости, а инерциальная система служит для осреднения высокочастотных ошибок.



Необработанный сигнал датчика доплеровской системы имеет спектр частот с постоянно колеблющимся центром. Для определения положения центра необходимо осреднение в течение некоторого времени.
На рис. 31 приведен график погрешностей доплеровской системы в функции времени для летательного аппарата, перемещающегося с постоянной путевой скоростью. Из графика видно, что для осреднения нужно лишь несколько секунд, чтобы затем точно измерять доплеровскую частоту, пропорциональную скорости летательного аппарата.
В датчике инерциальной системы дело обстоит иначе — максимальная точность здесь получается сразу после начала измерений, затем с течением времени эта точность падает в результате ухода вертикали с периодом Шулера. Следствием ошибок вертикали являются погрешности определения путевой скорости. Зависимость этих погрешностей от времени из-за частных ошибок в работе акселерометра и свободного (курсового) гироскопа показана на рис. 32 и 33. Точке t = 0 на графиках соответствует момент начала работы системы-
  |
Так как точность определения путевой скорости доплеровским датчиком для периодов, больших нескольких секунд, постоянна (т. е. не зависит от времени), то полученную разность сигналов можно использовать для внесения поправок в значение путевой скорости на выходе инерциального датчика. Тем самым становится возможным непосредственно с выхода интегратора ускорений инерциального датчика снимать мгновенное достаточно точное значение путевой скорости, не имеющее высокочастотных колебаний свойственных доплеровскому измерителю. Такая комбинированная система позволяет с высокой точностью определять путевую скорость на этапах полета любой продолжительности.
  |

На рис. 34 приведена схема, показывающая последовательность прохождения информации в комбинированной инерциально-доплеровской системе, основными узлами которой являются: доплеровский датчик, инерциально-доплеровский компаратор скорости, инерциальный датчик и блок обработки данных информации. В компараторе осуществляется сравнение путевой скорости, измеренной раздельно доплеровским и инерциальным датчиком. Компаратор через цепь обратной связи передает сигналы ошибки на индикатор путевой скорости, измеренной инерциальным датчиком. Блок обработки, получив данные с выходов инерциальной системы, формирует необходимую информацию для управления полетом.
В инерциально-доплеровской системе полученная от доплеровской аппаратуры информация о путевой скорости формирует демпфирующие и корректирующие сигналы для инерциального датчика. Тем самым демпфируется амплитуда и уменьшается период ошибок; этим же частично нейтрализуются и постоянные, и случайные ошибки.
В общем, инерциально-доплеровская система работает как низкочастотный фильтр для ошибок определения путевой скорости, возникающих в доплеровском датчике, и как высокочастотный фильтр для ошибок, возникающих в инерциальном датчике.

Инерциально-доплеровская система (рис. 35) состоит из доплеровского и инерциального датчиков, вычислительной аппаратуры и блока отсчетных устройств.
Доплеровский датчик имеет четыре основных агрегата: радиолокационный приемник-передатчик, источник питания, усилитель и преобразователь сигналов. В схему радиолокационного приемника-передатчика входит мощный клистронный генератор, передающая и приемная антенны и кристаллические детекторы. На выходе радиолокационного приемника-передатчика получают частоту доплеровского сдвига. Усилитель увеличивает амплитуду сигнала этой частоты и подает его на вход преобразователя. Здесь сигнал преобразуется в серию единичных импульсов, число которых пропорционально доплеровскому сдвигу частот.
Инерциальный датчик состоит из двух узлов: инерциальной платформы и усилителя управления платформой. На выходах инерциальной платформы появляются сигналы, моделирующие поперечные и продольные крены и положение летательного аппарата в азимутальной плоскости, и серии единичных импульсов, частота которых пропорциональна ускорениям летательного аппарата.
Вычислительная аппаратура представляет собой небольшую авиационную цифровую вычислительную машину специального назначения, индикатор контроля и входное-выходное устройство. В последнем формируются требуемые сигналы, устанавливаются нужные соотношения между цифровыми и аналоговыми величинами и добавляются шкальные коэффициенты. Цифровая вычислительная машина рассчитывает по значению частоты доплеровского сдвига путевую скорость, сравнивает данные скорости, полученные от доплеровского и инерциального датчика, и рассчитывает необходимые сигналы ошибок, подаваемые в цепь обратной связи.
Блок отсчетных устройств выдает индикации путевой скорости, угла сноса, курса, расстояния до пункта назначения, величины и знака бокового уклонения от заданной линии пути.
Комбинированная система навигации (АНК в сочетании с доплеровским измерителем W и УС)

В указанной системе (Рис. 36) в качестве основного (запоминающего) устройства применяется АНК, работающий от измерителя истинной воздушной скорости V и курса ψ. Значения V и ψ, кроме АНК, поступают в вычислитель ветра и, являющийся одновременно хранителем полученного значения ветра, а также угла сноса. Значение и получается в вычислителе путем решения навигационного треугольника скоростей по соотношению U = W—V, причем дискретное значение W поступает в вычислитель от доплеровского измерителя путевой скорости. После отключения этого измерителя от системы АНК работает по полученному в момент включения значению ветра. С выхода АНК снимаются координаты места самолета. Чем больше частота подключения доплеровского измерителя к АНК, тем точнее работает система.
Как указывалось выше, ошибки интегрирования здесь все равно накапливаются с течением времени. Ввиду того, что скорость и направление ветра не изменяются скачкообразно (исключение составляет лишь пересечение метеорологических фронтов и струйных течений на больших высотах), увеличивать частоту включений измерителя W и УС целесообразно лишь до определенных пределов. Эти пределы могут быть установлены исходя из соотношения, характеризующего пространственную изменчивость ветра в зависимости от удаления летательного аппарата от пункта измерения ветра:

где rS — среднее квадратичное радиальное отклонение (в км/час), характеризующее пространственную изменчивость ветра на этапе полета протяженностью S км.
В рассмотренной навигационной системе сочетаются преимущества автономности АНК с высокой точностью измерения путевой скорости и угла сноса доплеровским измерителем.
Комплексная система навигации (АНК в сочетании с панорамным радиолокатором и астрокорректором курса)

В системе (рис. 37) применен АНК, счисляющий путь по данным истинной воздушной скорости и курсу. Радиолокатор и астрокорректор используются для периодических дискретных коррекций места самолета и курса самолета. Точное место самолета штурман может определить с помощью панорамного радиолокатора при наличии на земле двух радиолокационных ориентиров или наземных радиолокационных маяков, точное местонахождение которых ему известно. При этом место самолета вычисляется исходя из фактических значений наклонных дальностей до ориентиров, их пеленгов и высоты полета (рис. 38).
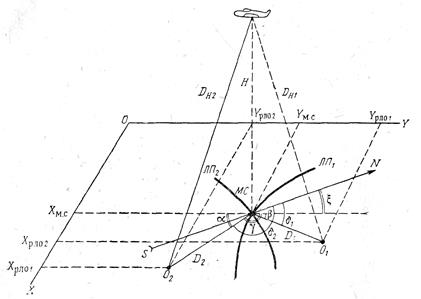
Рис. 38. Схема определения места самолета и коррекции курса.
Место самолета определяется совместным решением уравнений двух линий положения ЛП1 и ЛП2, представляющих собой окружности с радиусами D1 и D2; центры О1 и О2 окружностей находятся в известных точках — местах радиолокационных ориентиров (РЛО). Результат вычислений фактических координат места самолета сравнивается с координатами места самолета, вычисленными АНК.
Согласно рис. 15 координаты места самолета могут быть определены из следующих очевидных геометрических соотношений:
Yм.c = ½[YРЛО1 + YРЛО2—D1cos (δ1—ξ)—D2 cos (δ2—ξ)];
Xм.c = ½[XРЛО1 + XРЛО2—D1sin (δ1—ξ)—D2 sin (δ2—ξ)].
При наличии разницы между фактическими и счисленными координатами места самолета показания АНК должны быть соответствующим образом скорректированы. В более сложных системах введение сигналов коррекции может быть использовано как для компенсации погрешностей счисления, накопившихся при работе АНК, так и для компенсации погрешностей вычисления ветра.
С помощью астрономического курсового корректора (в условиях видимости светил) могут быть откорректированы показания гирополукомпаса — датчика курса АНК, ошибка которого накапливается с течением времени. Гирополукомпас можно также корректировать и с помощью панорамного радиолокатора одновременно с определением координат фактического места самолета. Если будет определено место самолета, то может быть рассчитан курсовой угол одного из ориентиров, координаты которого известны. После этого нетрудно вычислить азимут этого ориентира. Разница между вычисленным азимутом и курсовым углом ориентира и будет истинным курсом самолета.
Комплексные системы, сочетающие инерциальные средства с астрономическими и радиолокационными корректорами места
Накапливающаяся с течением времени ошибка измерения места самолета с помощью инерциальных средств устраняется в результате введения корректирующих сигналов в моменты включения дискретной коррекции от астрономического ориентатора (или от панорамного радиолокатора (рис. 40)), которые определяют место самолета с ошибкой, не зависящей от продолжительности и дальности полета. Точность коррекции места с помощью астроориентатора (по схеме рис. 39) с автономной гировертикалью весьма низка, так как она определяется погрешностями самой вертикали, возмущаемой действующими на самолет ускорениями. Поэтому большее распространение получают так называемые астроинерциальные навигационные системы, в которых точность определения координат места самолета значительно повышается за счет органического объединения средств пеленгации светил и средств выработки вертикали.
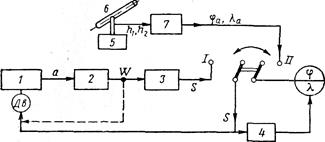
Рис. 39. Блок-схема коррекции инерциальной системы с помощью астроориентатора.
1—площадка с акселерометрами, 2—первый интегратор, 3—второй интегратор, 4—устройство преобразования координат, 5—стабилизированная в истинном горизонте платформа, 6—телескопы, 7—счетно-решающее устройство, Дв—исполнительный двигатель.
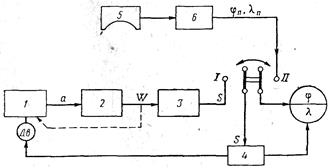
Рис. 40. Блок-схема коррекции инерциальной системы с помощью панорамного радиолокатора.
1—площадка с акселерометрами, 2 и 3—интеграторы, 4—устройство преобразования координат, 5—панорамный радиолокатор. 6—вычислитель панорамного радиолокатора, Дв—исполнительный двигатель.
Для осуществления астрономической коррекции гироориентатора на летательном аппарате устанавливаются два телескопа, направленные на две выбранные звезды. При перемещении летательного аппарата оси телескопов фиксируют два направления в инерциальном пространстве. Если с этими направлениями связать некоторую площадку, то получим стабилизированную платформу. Для того чтобы обеспечить работу астрономической следящей системы и выдержать правильное направление осей телескопов на звезды при временном отсутствии видимости последних, телескопы стабилизируют с помощью гиростабилизатора.

Рис. 41. Общий вид комбинированной системы: астроориентатор — гироориентатор.
1—зеркало телескопа, 2—полупрозрачное стекло, 3—азимутальный гироскоп, 4, 7 и 15—коррекционные электродвигатели, 5—шкала указателя широты, 6, 11 и 17—разгрузочные электродвигатели, 8 и 14—гироскопы, 9—часы, 10—шкала указателя курса, 12 и 13—шкалы указателя долготы, 16—телескоп.

На рис. 41 показан общий вид комбинированной системы, сочетающий в себе астроориентатор и гироориентатор. Ось N—S гироориентатора всегда направлена по меридиану, а ось телескопа астросистемы — по оси мира. Принцип работы системы состоит в следующем. При отсутствии видимости светил система работает как гироориентатор.
Если же осуществляется пеленгация светил, то она работает как астроориентатор. Схема выдачи показаний астро- и гироориентаторов приведена на рис. 42. Там же показаны основные связи между гироскопической и астрономической частями системы.
Вопросы студентам:
1. В чем заключается и что обеспечивает основной режим автоматического управления самолетом в АНК? Опишите режимы КР, КС, ВМ.
2. Опишите работу схемы захода на посадку АНК, работающего в ГО-координатах.
3. В чем отличие АНК с БЦВМ от АНК с аналоговым НВ?
4. Какие задачи решает БЦВМ в АНК? Опишите блок-схему.
5. Как работает ПУИ в АНК с БЦВМ?
6. Опишите ПНП.
7. Опишите ПИНО.
8. В чем разница работы АНК с СВС, с ДИСС и с астроориентатором- гироориентатором?
Лекция 14
КОМПЛЕКСНЫЕ СИСТЕМЫ НАВИГАЦИИ, ОПРЕДЕЛЯЮЩИЕ МЕСТО САМОЛЕТА В ЕДИНОЙ СИСТЕМЕ КООРДИНАТ
Ввиду большого количества первичных датчиков, определяющих навигационные параметры в различных условиях полета, необходимости анализа и обобщения результатов измерения этих параметров и обеспечения автоматического управления полетом на современных самолетах применяются комплексные системы навигации, создаваемые на базе центральных вычислителей. Эти системы обеспечивают централизацию процесса измерения, обработки и выдачи информации экипажу или в систему автоматического управления самолетом.
Навигационные устройства определяют место самолета в различных системах координат (географических, ортодромических, полярных и др.), что неудобно при использовании единых навигационных систем. Поэтому объединение различных устройств в комплексные навигационные системы производится на базе единой системы координат.
Приведем формулы, позволяющие производить перерасчет координат точек из одной системы в другую. На рис. 43 изображены различные системы координат для определения места самолета. За одну из осей X выбрана ортодромия АЦ, где А (с координатами φА, λА)—точка вылета; Ц (φЦ, λЦ)— точка цели. Место самолета — точка К (φ, λ) в ортодромической системе координат
определяется координатами X, Y, где Y — боковое уклонение от главной ортодромии АЦ. Полюс главной ортодромии находится в точке Р0 (φ0, λ0). Точка РN — Северный полюс Земли.

Рис. 43. Схема перерасчета координат места самолета.
Полет самолета из точки К в точку Ц может выполняться через промежуточные пункты маршрута, например, по ортодромии КМ1 в точку M1(X1,Y1). При этом на самолете должны определяться полярные или, как их иногда называют, этапные координаты: дальность L по ортодромии и угол ΔψДОВ доворота на заданную точку ортодромии.
В точке С (φC, λC) расположена средняя станция навигационной радиотехнической гиперболической системы, а в точках С1 и С2 — боковые станции. Гиперболические координаты места самолета, находящегося в точке К, есть ρГ и α. Точка М представляет собой географическое место светила.
Формулы связи географических координат φ, λ места самолета:
а) с небесными координатами светил
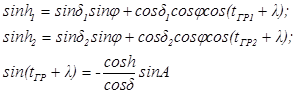
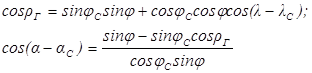
б) с гиперболическими координатами, определяемыми при использовании разностно-дальномерной системы
в) с ортодромическими координатами
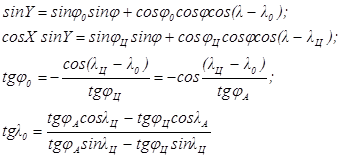
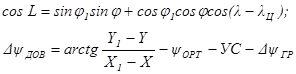
г) с полярными («этапными») координатами
Как видно из зарубежной печати, навигационные системы современных летательных аппаратов, создаваемые на базе центральных вычислительных математических машин, должны быть связаны с системой управления летательного аппарата и обеспечивать выдачу сигналов в командные пилотажно-навигационные указатели для ручного управления пилотируемых самолетов. Для определения располагаемого времени полета до цели и располагаемой дальности навигационные системы могут быть связаны с измерительными устройствами топливных систем самолетов.
Включение в навигационную систему вычислительных устройств, способных выполнять некоторые логические операции, позволяет сопоставлять результаты измерения навигационных параметров, получаемых от различных устройств, оценивать их достоверность и назначать некоторые средние значения, имеющие наибольшую вероятность совпадения с истинными величинами. Применение в навигационных системах цифровых вычислительных машин значительно упрощает навигационные датчики первичной информации — каждый из них лишается специализированных вычислителей; например, автоматический астрономический секстант, определяющий место самолета по высотам двух светил, представляет собой в этом случае всего лишь датчик высот этих светил. Возможная блок-схема такой комплексной навигационной системы в самом общем виде представлена на рис. 44.
Дата добавления: 2016-10-07; просмотров: 1865;
Поиск по сайту
Узнать еще
- D-элементы, их применение в медицине и фармации.
- I.2.3 ПЕРВЫЙ ЗАКОН (НАЧАЛО) ТЕРМОДИНАМИКИ. ПРИМЕНЕНИЕ ПЕРВОГО ЗАКОНА ТЕРМОДИНАМИКИ К ИЗОПРОЦЕССАМ
- А. Повторное применение лекарственных веществ
- Адсорбция на твердых поверхностях и ее применение в пищевой промышленности
- Алюминиевые сплавы в строительстве. Сортамент. Виды, применение
- Антенны радионавигационных средств
- Апельсин общая характеристика и применение
- Ассортимент и применение швейных ниток

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
