Асинхронні лічильники
Основні характеристики лічильників. Типи лічильників
Лічильники імпульсів – це своєрідні скінченні автомати, які можуть проектуватись у відповідності до описаних у Розділі 7 правил і необхідного алгоритму функціонування.
У загальному плані лічильниками називаються цифрові пристрої (автомати), призначені для підрахунку і фіксації кількості імпульсів, що подаються на їх інформаційні входи або синхровходи. Назва “лічильники” використовується до будь-яких послідовнісних цифрових пристроїв із замкнутим циклом діаграми станів.
Як пристрої цифрової схемотехніки, лічильники характеризуються наступними основними параметрами. Статичний параметр – коефіцієнт перерахування (модуль перерахування) М – характеризує максимальну кількість імпульсів, яка може бути подана на лічильник, щоб привести його до початкового стану. Динамічні параметри лічильників характеризують їх швидкодію. Основний динамічний параметр – час установлення вихідного коду (tуст): це інтервал часу з моменту подачі вхідного імпульсу до моменту встановлення коду на виходах лічильника. Другий важливий динамічний параметр – дозволяюча спроможність лічильника (tсд), яка визначається як мінімальний інтервал часу між двома вхідними імпульсами. Величина
 (8.1)
(8.1)
називається максимальною частотою роботи лічильника.
Оскільки скінченні автомати можуть бути синхронними і асинхронними, то і, відповідно, ті групи автоматів, які спеціально призначені для підрахунку кількості імпульсів, можуть також бути синхронними і асинхронними.
У синхронних лічильниках, приклади яких приведені у Розділі 7, синхросигнал на всі тригери подається одночасно, а зміна стану тригера відбувається лише тоді, коли на інформаційних входах будь-якого тригера підготовлені відповідні дані. В асинхронних лічильниках, які часто називають послідовними, вхідна послідовність імпульсів подається лише на перший тригер, а решта тригерів спрацьовує в залежності від зміни стану попереднього.
Асинхронні лічильники
Прикладом асинхронних (послідовних) лічильників є схема, що приведена на рис. 8.1, а.
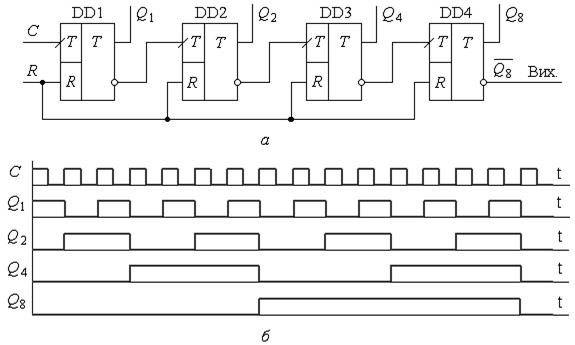
Рис.8.1.
Такі лічильники в своїй роботі використовують властивості Т-тригера, оскільки вони можуть як зберігати свій стан, так і додавати за модулем 2 вхідний сигнал до інформації, записаної попередньо. Одиночний Т-тригер ділить на 2 частоту вхідної послідовності імпульсів. Послідовне включення m таких тригерів дає можливість поділити частоту вхідних імпульсів у M = 2m разів, або утворює лічильник з коефіцієнтом перерахунку М (модуль рахунку, ємність лічильника).
Таблиця 8.1.
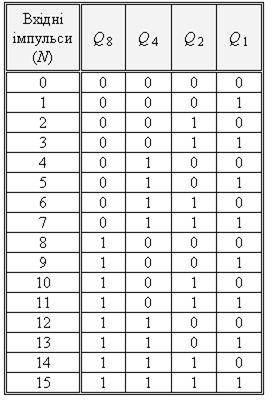 Робота найпростішого двійкового лічильника (рис. 8.1, а) пояснюється даними, приведеними у табл. 8.1 і часовими діаграмами, зображеними на рис. 8.1, б.
Робота найпростішого двійкового лічильника (рис. 8.1, а) пояснюється даними, приведеними у табл. 8.1 і часовими діаграмами, зображеними на рис. 8.1, б.
Перед подачею вхідних імпульсів тригери лічильника обнуляються. При подачі першого імпульсу на вхід С тригер, виконаний на мікросхемі DD1, у відповідності до його алгоритму роботи, змінює свій стан на протилежний. При цьому на його прямому виході з’явиться сигнал, еквівалентний логічній “1”, а на інверсному виході встановлюється логічний “0”. У відповідності до схеми, тригери з динамічною синхронізацією спрацьовують за фронтом вхідного імпульсу. Стани решти тригерів не зміняться, оскільки другий тригер DD2 по своєму тактовому входу сприйме перепад з “1” в “0”, що матиме місце на інверсному виході першого тригера, а тригери DD3 і DD4 на своїх входах не матимуть ніяких змін. У результаті після першого вхідного імпульсу значення виходів тригерів відповідатимуть значенням, приведеним у табл. 8.1 в другому рядку. Другий вхідний імпульс призведе до повторної зміни стану тригера DD1. Тепер на його інверсному виході матиме місце зміна стану з логічного “0” на логічну “1”, що сприймається тригером DD2 як фронт вхідного імпульсу. В результаті тригер DD2 змінить свій стан на протилежний, і на його виході Q2 з’явиться сигнал логічної “1”, у той час як вихід Q1 тригера DD1 перейде в нульовий стан (в умовних позначеннях виходів лічильників прийнято номери виходів поєднувати з їх ваговими коефіцієнтами). Цей стан відповідатиме третьому рядку таблиці, відповідно до якого виходи тригерів зафіксують число 2 у двійковому коді. Третій імпульс знову змінить лише стан тригера DD1, прямий вихід якого відповідає молодшому розряду двійкового коду, що відображає кількість імпульсів, що були подані на вхід С-.
Рис. 8.1, б ілюструє часові співвідношення між станами тригерів, що зафіксовані їх прямими виходами. Зміни станів тригерів прийняті миттєвими.
З табл. 8.1 і часової діаграми (рис. 8.1, б) бачимо, що виходи тригерів лічильника в двійковому коді відображають кількість поданих на вхід імпульсів N, якщо ця кількість менша числа М.
Якщо на вхід лічильника подано N імпульсів, то їх кількість, підрахована за допомогою лічильника, відповідає формулі:
 , (8.2)
, (8.2)
де K – кількість вихідних імпульсів лічильника;  – рівень сигналу на i-ому виході лічильника; 2i – вагові коефіцієнти кожного прямого виходу. Для урахування вагових коефіцієнтів виходи лічильника нумерують відповідними індексами. Це дає можливість з послідовності значень виходів Q8 Q4 Q2 Q1 , рівних, наприклад, 1011, одразу ж зчитувати вміст лічильника, тобто кількість імпульсів, яка менша М.
– рівень сигналу на i-ому виході лічильника; 2i – вагові коефіцієнти кожного прямого виходу. Для урахування вагових коефіцієнтів виходи лічильника нумерують відповідними індексами. Це дає можливість з послідовності значень виходів Q8 Q4 Q2 Q1 , рівних, наприклад, 1011, одразу ж зчитувати вміст лічильника, тобто кількість імпульсів, яка менша М.
При N = M усі тригери лічильника обнуляються, і такий перехід фіксується зміною стану інверсного виходу тригера DD4 з “0” в “1”, що наступними аналогічними схемами повинно сприйматись як фронт вихідного імпульсу. Це дає можливість безпосереднього нарощування розрядності лічильників шляхом прямого з’єднання входу наступного лічильника з виходом попереднього. При однотипних лічильниках кількість тригерів подвоюється, і загальний коефіцієнт перерахунку визначатиметься формулою:
 .
.
Звідси витікає, що при безпосередньому нарощуванні кількості лічильників загальний коефіцієнт перерахунку визначається добутком відповідних коефіцієнтів окремих лічильників.
Зазвичай код, що визначається вихідними станами тригерів, змінюється у зростаючому напрямку (додаючі лічильники). Операція збільшення вмісту лічильника на одиницю називається інкрементуванням. При зворотній зміні станів лічильники звуться віднімаючими, а якщо напрямок рахунку може змінюватися, то лічильник має назву реверсивного. Операція зменшення вмісту лічильника на одиницю називається декрементуванням. Напрямок рахунку визначається як динамічними властивостями тригерів (перемикання за фронтом чи за спадом), так і способом з’єднання виходів попереднього тригера зі входом наступного. Якщо, наприклад, у лічильнику використовуються тригери, які змінюють свій стан за фронтом синхроімпульсу, то для організації додаючого лічильника необхідно з’єднати вхід наступного тригера з інверсним виходом попереднього, а для створення віднімаючого лічильника для зв’язку використовуються прямі виходи тригерів. При застосуванні тригерів, що змінюють свій стан за спадом синхроімпульсу, вказані зв’язки повинні бути протилежними.
Прикладом віднімаючого лічильника може служити схема, що приведена на рис. 8.2.
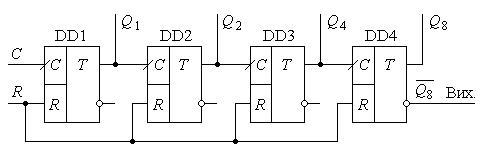
Рис.8.2.
Якщо всі тригери лічильника встановлені в одиничний стан, то при подачі першого вхідного імпульсу тригер DD1 змінить свій стан на протилежний, і на виході Q1 запишеться значення Q1 = 0. Тригер DD2 при цьому не змінить свій стан, оскільки на його вході матиме місце спад імпульсу, на який він не реагує. Наступний вхідний імпульс призведе до появи на Q1 сигналу одиничного рівня, при цьому тригер DD2 змінить свій стан, і на виходах тригерів зафіксується число Q8 Q4 Q2 Q1 = 11012 = 1310 . Подібний процес продовжуватиметься до повного обнуління тригерів, а шістнадцятий імпульс забезпечить встановлення всіх тригерів в одиничний стан.
Для чотирьохрозрядного додаючого лічильника з M = 24 = 16 початковим кодом, записаним на прямих виходах тригерів, є 0000, а кінцевим, після якого настає переповнення, – 1111. Останній код, звичайно, є початковим для віднімаючого лічильника. У випадку, коли в якості початкового коду віднімаючого лічильника прийнятий стан 0000, то поточні стани тригерів лічильника відображають від’ємне число зчитаних імпульсів, що представлене в допоміжному коді.
Порівнюючи схеми, приведені на рис. 8.1, а і рис. 8.2, легко дійти висновку щодо можливості побудови реверсивних лічильників, які завдяки керуючому входу могли б забезпечувати додавання чи віднімання вхідної послідовності імпульсів. Для цього між тригерами необхідно встановити схему, яка б забезпечувала керовану комутацію одного з двох виходів попереднього тригера на вхід наступного. Такою схемою, як відомо, є мультиплексор 2:1.
На рис. 8.3 приведена схема асинхронного реверсивного лічильника.
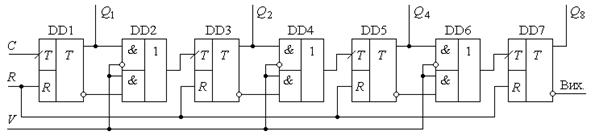
Рис.8.3
Керуючий вхід V за допомогою двохвходових мультиплексорів DD2, DD4, DD6 забезпечує комутацію виходів тригерів DD1, DD3, DD5 на входи наступних – відповідно, DD3, DD5, DD7. При значенні сигналу на цьому вході V = 1 забезпечуватиметься підключення інверсних виходів і лічильник працюватиме на інкрементування вмісту, при V = 0 забезпечуватиметься режим декрементування.
R – асинхронний статичний вхід загального скидання, за яким прямі виходи всіх тригерів встановлюються в “0”.
За один цикл роботи лічильник приймає 2m станів. Тому, з точки зору теорії скінченних автоматів, розглянутий лічильник – це асинхронний скінченний автомат з замкнутим циклом роботи, в якому перехід з одного стану до іншого забезпечується вхідними інформаційними імпульсами.
Кожен стан кодується m-розрядним двійковим словом. Граф-схема лічильника за модулем 8 як скінченного автомата (діаграма станів) приведена на рис. 8.4.
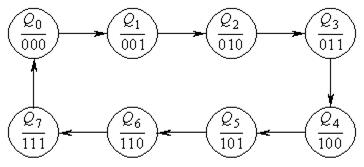
Рис.8.4.
Особливість розглянутих схем лічильників полягає в тому, що для зміни значення одного з старших розрядів кодового слова повинні змінюватись і всі молодші розряди. Фактично це означає, що перед зміною стану тригера, що зберігає інформацію про вміст старших розрядів кодового слова, повинні змінити свій стан і всі попередні тригери. Якщо прийняти, що зміна стану одного тригера проходить за інтервал часу затримки tЗ , то між моментом подачі вхідного імпульсу і зміною стану тригера старшого розряду має місце часова затримка tЗM = m tЗ . Іноді цей параметр називається часовою спроможністю лічильника. Фізично параметр tЗM визначає мінімальний інтервал часу між двома вхідними імпульсами, при якому лічильник в найгіршому режимі перемикання встигає їх відпрацювати. Ця максимально можлива величина часової затримки визначає швидкодію лічильників при перерахунку імпульсних послідовностей. Максимально можлива частота вхідної послідовності імпульсів визначається за формулою
 . (8.3)
. (8.3)
Тому послідовний спосіб забезпечення перерахунку суттєво обмежує швидкодію двійкових лічильників. Пристрої такого типу називаються лічильниками з послідовним переносом.
Існують лічильники з іншими видами кодування станів виходів тригерів – наприклад, унітарним – коли стан лічильника представляється кількістю записаних в ньому одиниць; одинарним – коли стан лічильника визначається розташуванням однієї одиниці.
Дата добавления: 2016-09-26; просмотров: 5270;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
