ЦАП и его характеристики
Цифро-аналоговый преобразователь имеет нелинейную характеристику, аналогичную АЦП (рис. 8). Все рассуждения, проводившиеся для АЦП относительно возможности возникновения автоколебания и выборе цены младшего разряда, справедливы и для ЦАП. При расчетах он также условно представляется линейным элементом (усилительным звеном) с коэффициентом усиления  .
.
Математическая модель МПСУ
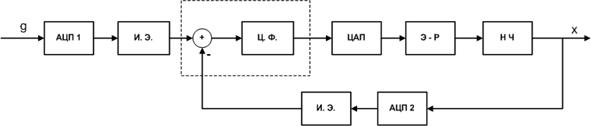
Теперь, когда мы нашли описания всех каналов связи, представим их на единой структурной схеме, взяв за основу структурную схему МПСУ (рис. 13).
|
Рис. 13.
Операция вычисления ошибки реально выполняется микропроцессором (цифровым фильтром) в соответствии с алгоритмом управления. На приведенной выше схеме она вынесена за пределы ЦФ исключительно для удобства моделирования МПС (физически представленный на схеме сумматор не существует).
АЦП 1 и АЦП 2 имеют разрядности  и
и  соответственно. На практике, как правило, их разрядности совпадают, так как в противном случае при вычислении ошибки неизбежно будет возникать погрешность. Поэтому мы тоже можем допустить, что разрядности АЦП 1 и АЦП 2 совпадают.
соответственно. На практике, как правило, их разрядности совпадают, так как в противном случае при вычислении ошибки неизбежно будет возникать погрешность. Поэтому мы тоже можем допустить, что разрядности АЦП 1 и АЦП 2 совпадают.
Рассмотрим теперь работу во времени импульсных элементов в каналах ОС и ВС.
Времена их срабатывания соответствуют моментам ввода сигнала  и сигнала
и сигнала  (рис. 6). Если предположить, что время выполнения расчета намного больше, чем время ввода и (а так и бывает в большинстве случаев), можно считать, что импульсные элементы срабатывают одновременно (то есть работают синхронно и синфазно).
(рис. 6). Если предположить, что время выполнения расчета намного больше, чем время ввода и (а так и бывает в большинстве случаев), можно считать, что импульсные элементы срабатывают одновременно (то есть работают синхронно и синфазно).
С учетом приведенных рассуждений, схема рис. 13 может быть преобразована к следующему виду (рис. 14):

|
Рис. 14.
Представим АЦП в виде усилительного звена с коэффициентом усиления  , ЦАП — в виде усилительного звена с коэффициентом усиления
, ЦАП — в виде усилительного звена с коэффициентом усиления  . Тогда при условии, что в ЦФ реализуются линейные алгоритмы коррекции, схема рис. 14 может быть представлена в следующем виде (рис. 15):
. Тогда при условии, что в ЦФ реализуются линейные алгоритмы коррекции, схема рис. 14 может быть представлена в следующем виде (рис. 15):

|
Рис. 15.
Если пренебречь известным эффектом реализации линейных корректирующих устройств в МПС, когда дискретная реализация дает заведомо худшие показатели качества СУ, можно заменить ЦФ неким непрерывным корректирующим устройством, присоединенным к непрерывной части системы. С учетом того, что экстраполятор — то же самое, что и формирователь импульса, получим из рис. 15 следующую модель (рис. 16):
|
Рис. 16.
Таким образом, мы пришли к классической математической модели дискретной САУ (рис. 1).
Еще раз повторим тем допущения, которые были сделаны при нахождении математической модели МПСУ:
1. Разрядности АЦП в каналах ОС и ВС одинаковы.
2. Пренебрегаем нелинейностью характеристик ЦАП и АЦП, заменяя их линейными усилительными звеньями.
3. Ввод данных в микропроцессор происходит намного быстрее, чем расчет управляющего сигнала, поэтому срабатывание импульсных элементов в каналах ОС и ВС можно считать одновременным.
4. В цифровом фильтре реализованы линейные алгоритмы управления.
Тесты.
Дата добавления: 2019-02-08; просмотров: 830;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- B) в угле Интинского месторождения и продуктах его сжигания.
- I. Государственный бюджет и его структура. три состояния государственного бюджета.
- I. Общая характеристика категории состояния как часть речи
- I. Товар и его свойства.
- II. ГОСУДАРСТВЕННЫЙ ДОЛГ И ПУТИ ЕГО ПОГАШЕНИЯ
- II. Движение поездов на однопутных перегонах
- II. Основные характеристики микроскопа.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
