Электропривод автоматических регуляторов подачи долота
Под подачей долота понимают последовательное опускание верхней точки бурильной колонны при разрушении породы. В установившемся режиме бурения скорость подачи долота должна быть равна скорости разбуривания породы. Если скорость подачи долота будет превосходить скорость разбуривания породы, то нагрузка на забой будет расти, что может повлечь за собой искривление ствола скважины или поломку бурильных труб. Если скорость подачи долота будет ниже скорости разбуривания, нагрузка на забой будет уменьшаться, что приведет к уменьшению скорости бурения.
При ручной подаче бурильщик, руководствуясь показаниями приборов — амперметра в цепи статора бурового двигателя и индикатора веса, периодически растормаживает барабан лебедки. Таким способом весьма трудно осуществить плавную равномерную подачу долота. При использовании автоматических регуляторов долото подается на забой автоматически в зависимости от параметров, характеризующих режим бурения, например давления на забой или тока бурового двигателя. Существуют различные конструкции автоматических регуляторов подачи долота. В зависимости от места расположения автоматические регуляторы подачи бывают наземными или глубинными (погружными). Наземные автоматические регуляторы подачи по конструктивному признаку силового узла можно разделить на электромашинные, гидравлические и фрикционные. Конструкция силового узла позволяет или опускать бурильную колонну с различной скоростью (такие автоматические регуляторы называются пассивными), или не только опускать, но и приподнимать ее (такие регуляторы называются активными). Применение наземных автоматических регуляторов подачи долота обеспечивает увеличение механической скорости бурения и проходки на долото на 5—15 % по | сравнению с ручной подачей, что полностью окупает затраты j на их изготовление и обслуживание
Автоматический регулятор типа РПДЭ-3 предназначен для поддержания режимов бурения скважин турбобуром и ротором. Этот регулятор входит в комплект всех серийных буровых установок, а также вновь разрабатываемых установок. Регулятор РПДЭ-3 обеспечивает режим поддержания заданной нагрузки на долото (веса инструмента на крюке)—основной режим; режим поддержания заданного значения скорости подачи или подъема инструмента — вспомогательный режим.
Регулятор (рис. 1) состоит из следующих основных частей:
рессорного датчика веса типа ДВР-26, устанавливаемого на неподвижном конце талевого каната и служащего для измерения веса на крюке; датчик состоит из рессор и сельсина СД;
узла уставки веса и скорости, состоящего из сельсина-приемника СП уставки веса и задающего сельсина СЗ уставки скорости; оба сельсина связаны через зубчатую передачу с общей рукояткой управления, расположенной вместе с универсальным переключателем УП на пульте управления регулятором;
станции управления с реверсивным магнитным усилителем СМУ, состоящим из двух магнитных усилителей МУ1 и МУ2 54 и служащим для усиления сигнала (усилитель питает обмотки возбуждения генератора ОВГП), и с предварительным полупроводниковым фазочувствительным усилителем ППУ-1, служащим для усиления управляющего сигнала;
двигатель-генератора (двухмашинного агрегата), состоящего из приводного асинхронного двигателя АДГ и генератора постоянного тока ГП, который управляет двигателем ДП;
силового узла, состоящего из червячно-цилиндрического редуктора, двигателя постоянного тока ДП с пристроенными вентилятором и тахогенератором и электромагнитного колодочного тормоза; редуктор соединяется цепной передачей с лебедкой буровой установки.
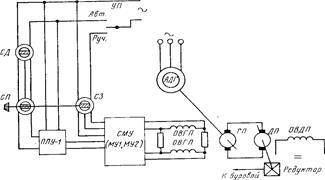
Рис. 1 Упрощенная электрическая схема регулятора РПДЭ-3
В основном режиме работы при помощи переключателя УГТ к источнику переменного тока присоединяются усилитель ППУ-1 и обмотка возбуждения сельсина-датчика СД, работающего в паре с сельсином-приемником СП в трансформаторном режиме. Питание обмотки возбуждения сельсина СЗ в этом случае отключено.
Напряжение на зажимах обмотки возбуждения сельсина-СП зависит от угла рассогласования ротора сельсинов СД и СП. При согласованном положении роторов это напряжение равно нулю, вследствие чего токи на выходе ППУ-1 и СМУ и напряжение на якоре генератора ГП равны нулю и вал двигателя ДП неподвижен. Под действием веса колонны бурильных труб и неподвижного конца талевого каната ротор сельсина СД поворачивается на некоторый угол, зависящий от веса колонны.
Перед началом бурения, когда долото находится над забоем, с помощью рукоятки на пульте управления ротор сельсина СП устанавливают в согласованное положение с ротором сельсина СД, в результате чего вал двигателя ДП будет неподвижным. Эта операция называется «взвешиванием» инструмента. Далее с помощью рукоятки устанавливают по шкале, находящейся на пульте управления, требуемое значение нагрузки на долото (веса на крюке), т. е. ротор сельсина СП поворачивают на определенный угол. На зажимах обмотки возбуждения сельсина СП возникает такое напряжение, что вал двигателя ДП начинает вращаться в сторону подачи инструмента с частотой, зависящей от угла рассогласования роторов -сельсинов СД и СП. Как только долото коснется забоя, осевая нагрузка на долото начнет увеличиваться, а вес на крюке — уменьшаться. При этом ротор сельсина-датчика будет поворачиваться в сторону уменьшения угла рассогласования роторов СД и СП. В результате управляющий сигнал (напряжение на зажимах обмотки возбуждения сельсина СП} и частота вращения двигателя ДП будут уменьшаться до тех пор, пока нагрузка на долото не достигнет значения, близкого к заданному, и установится режим, при котором скорость подачи долота будет равна скорости бурения.
В дальнейшем заданная нагрузка на долото поддерживается автоматически (с определенной точностью) независимо от твердости породы, износа долота и пр. Например, при попадании долота из твердой в более мягкую породу в первый момент нагрузка на долото несколько уменьшится, ротор сельсина СД повернется в направлении увеличения угла рассогласования роторов сельсинов СД и СП, управляющий сигнал увеличится и скорость подачи долота возрастет до такой величины, при которой установится режим бурения с большей скоростью при нагрузке на долото, близкой к заданной. При резком увеличении твердости породы может произойти кратковременный подъем инструмента, предотвращающий чрезмерное увеличение нагрузки на долото. При бурении в породах с резко изменяющейся буримостью регулятор РПДЭ-3 обеспечивает автоматическое поддержание заданной нагрузки на долото с точностью ±20 кН и скорость подачи долота до 50 м/ч.
Во вспомогательном режиме поддержания заданного значения скорости подачи-или подъема инструмента переключателем УП питание подается на обмотку возбуждения сельсина СЗ уставки скорости, а питание ППУ-1 и датчика веса отключается. Напряжение с обмоток синхронизации сельсина СЗ поступает непосредственно на обмотки управления магнитных усилителей МУ1 и МУ2, минуя ППУ-1. В среднем (нулевом) положении рукоятки управления задающий сигнал на входе СМУ равен нулю и вал двигателя ДП неподвижен. При повороте рукоятки в направлении «подъем» или «подача» на выходе СМУ (в обмотках возбуждения ОВГП генератора ГП) появляется ток той или иной полярности, на зажимах якоря ГП возникает напряжение, а двигатель ДП начинает вращаться с частотой и направлением, зависящими от положения рукоятки управления.
Вспомогательный режим используется при аварийном подъеме в случае отказа главного привода лебедки, при проработке скважины, при подъеме или опускании вышки с помощью силового узла РПДЭ-3, а также при бурении в случае выхода из строя датчика веса или ППУ-1.
Поскольку в этом режиме указанные элементы в работе не участвуют, их можно отключить от схемы для проведения ремонта.
Для стабилизации и увеличения быстродействия в схеме-применены отрицательные обратные связи по напряжению якоря генератора ГП и частоте вращения двигателя ДП. Машины ДП и ГП защищены от перегрузок в установившемся и переходном режимах, от коротких замыканий в цепи их якорей и от обрыва тока в обмотке возбуждения ОВДП двигателя ДП. В зависимости от типа буровой установки в РПДЭ-3 применяются асинхронные двигатели мощностью 28—55 кВт,. генераторы постоянного тока 27—50 кВт двигателя постоянного тока 25—42 кВт.
Для автоматизации подачи долота при бурении электробуром применяют регуляторы типов АВТ1 и АВТ2, представляющие собой приставки к регулятору РПДЭ-3. В основу работы этих регуляторов, так же как и регулятора РПДЭ-3, положена система генератор — двигатель с регулированием частоты вращения двигателя постоянного тока в широких пределах.
В схеме регулятора АВТ1 подача долота регулируется в функции нагрузки на долото и тока статора двигателя электробура, причем бурильщик может устанавливать два заданных значения уставки — осевой нагрузки на долото и силы тока электробура. Однако при этом всегда будет поддерживаться близким к заданному только один из параметров: в малоэнергоемких породах — нагрузка на долото, а в более энергоемких — сила тока двигателя электробура. Второй параметр будет в этом случае всегда меньше заданного. Регулятор АВТ1 также может работать в режиме поддержания постоянной скорости подачи или подъема инструмента.
Параметры отдельных частей схемы подобраны таким образом, что в установившемся режиме ошибка при поддержании силы тока электробура получается не более ±5 % от номинальной, а ошибка при поддержании веса — не более 20 кН. Основные узлы регулятора АВТ1 (датчик веса, силовой узел, двигатель—генератор) те же, что и в автоматическом регуляторе РПДЭ-3.
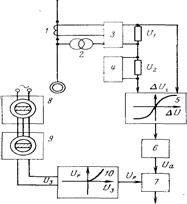
При бурении малоэнергоемких пород наиболее целесообразно использовать в качестве параметра активную составляющую тока двигателя электробура. Поэтому в регуляторе АВТ2 (рис. 2) имеется узел, вводящий в схему сигнал, пропорциональный активной составляющей тока двигателя электробура.
В датчике 3 по току и напряжению, снимаемым с трансформатора тока 1 и трансформатора напряжения 2, включенных в цепь питания электробура, вырабатывается сигнал Ui, пропорциональный активной составляющей тока двигателя электробура. Сигнал Ui сравнивается с сигналом U^ задатчика 4. Разностный сигнал через ограничитель 5 поступает в модулятор 6 и далее на сумматор 7 и вход ППУ регулятора РПДЭ-3. В датчике 8 вырабатывается сигнал, отражающий изменение осевой нагрузки на долото. Этот сигнал сравнивается с сигналом задатчика 9. Разностный сигнал поступает на фазочувствитель-ный усилитель 10 и далее на сумматор 7.
 На предварительный
На предварительный
усилитель регулятора
РПДЭ-3
Рис. 2 Структурная схема регулятора АТВ2
Если бурение ведется при больших значениях удельного момента и двигатель электробура работает с нагрузкой, близкой к номинальной, то напряжение Uз будет иметь такую фазу, что сигнал Up будет равен нулю. В этих условиях сигнал от датчика осевой нагрузки не поступает на сумматор и подача долота осуществляется в функции активной составляющей тока статора.
Если процесс бурения характеризуется небольшим удельным моментом, то значение активной составляющей невелико и регулятор повысит осевую нагрузку на долото. При повышении активной составляющей тока до уровня его ограничения напряжение на выходе ограничителя 5 и, следовательно, напряжение U^ будет поддерживаться постоянным со знаком, соответствующим подаче долота. Если осевая нагрузка достигнет установленного значения, на выходе фазочувствительного усилителя 10 появится сигнал Up, препятствующий дальнейшему повышению осевой нагрузки.
При переходе на бурение с большими значениями удельного момента регулятор вновь начнет поддерживать заданное значение активной составляющей тока статора, а контур осевой нагрузки автоматически отключится.
В буровых установках, оборудованных электромагнитными порошковыми тормозами (ТЭП), последние используются при бурении в качестве пассивных регуляторов подачи долота. Тормозной момент, развиваемый ТЭП, постоянен и не зависит от частоты вращения вала, причем тормозной момент почти однозначно определяется током возбуждения тормоза и на рабочем участке характеристики связан с ним линейной зависимостью.
Если в процессе бурения установить некоторую осевую нагрузку на долото и уравновесить момент от усилия на крюке тормозным моментом, то барабан лебедки будет неподвижен. Несколько уменьшив ток возбуждения тормоза, достигают медленного вращения барабана лебедки. Вследствие углубления долота в породу, нагрузка на долото уменьшается, а момент на валу барабана, увеличиваясь, становится больше тормозного момента и барабан начинает вращаться, обеспечивая плавную подачу инструмента. Если пренебречь трением труб о стенки скважины, то нагрузка на долото всегда будет равна разности между весом инструмента и тормозным усилием ТЭП.
Дата добавления: 2016-07-22; просмотров: 5925;
Поиск по сайту
Узнать еще
- Автоматизированный асинхронный электропривод с использованием синхронных электромашинных преобразователей частоты.
- Автоматизированный электропривод переменного тока с непосредственным преобразованием частоты (НПЧ).
- Автоматизированный электропривод с использованием ПЧ с ШИР.
- Автоматизированный электропривод с частотным преобразователем с ШИМ.
- Автоматических воздушныхвыключателей
- АВТОМАТИЧЕСКИХ ТОРГОВЫХ СИСТЕМ
- Анализ и синтез систем автоматического управления электроприводами
- Бескерновое бурение и применяемые долота

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
