МЕТОДЫ ИЗМЕРЕНИЯ ТРАЕКТОРИИ
На измерительных трассах при испытании летательного аппарата применяются, главным образом, пеленгационный и дальномерно–пеленгационный методы измерения траектории.
Пеленгационный метод реализуется при использовании угломерных измерительных средств – кинотеодолитов или фазовых пеленгаторов.
Измерение координат траектории летательного аппарата кинотеодолитами
Для определения координат траектории летательного аппарата достаточно измерить кинотеодолитами с двух измерительных пунктов i и j углы места летательного аппарата  и азимуты
и азимуты  или фазовыми пеленгаторами косинусы направляющих углов
или фазовыми пеленгаторами косинусы направляющих углов  (рис. 7).
(рис. 7).
|
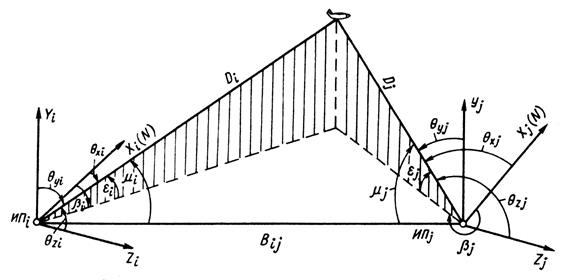
Рис. 7. Схема пеленгационного метода траекторных измерений
Измерительные пункты должны находиться друг от друга на некотором расстоянии  , называемом измерительной базой.
, называемом измерительной базой.
Для расчета координат летательного аппарата по измеренным углам используют наиболее употребительные в практике формулы прямой засечки. Если начало местной системы координат находится в измерительном пункте i, то формулы для определения  имеют вид
имеют вид

где  – углы места и азимута для пункта i;
– углы места и азимута для пункта i;  – наклонная дальность от кинотеодолита i-го пункта до летательного аппарата, которая определяется по формуле
– наклонная дальность от кинотеодолита i-го пункта до летательного аппарата, которая определяется по формуле

где – длина измерительной базы.
Если начало местной системы координат находится в пункте j, то вместо азимутов, углов места и дальности для пункта i в формулы подставляются параметры для пункта j.
 – углы наклона линий визирования, лежащие в плоскости, проходящей через измерительную базу и линии визирования летательного аппарата, с i-го и j-ro измерительных пунктов. Они вычисляются по формулам
– углы наклона линий визирования, лежащие в плоскости, проходящей через измерительную базу и линии визирования летательного аппарата, с i-го и j-ro измерительных пунктов. Они вычисляются по формулам
 ,
,
 ,
,
 – координаты начала Оj системы
– координаты начала Оj системы  в системе координат
в системе координат  .
.
 – координаты начала Оi системы в системе координат .
– координаты начала Оi системы в системе координат .
Наклонные дальности определяются по формулам
Точность определения координат летательного аппарата оценивается обычно при следующих допущениях:
· систематические погрешности выявлены и устранены;
· случайная погрешность имеет нормальный закон распределения;
· кривизна земной поверхности не учитывается;
· неточность привязки результатов измерений двух измерительных пунктов к СЕВ пренебрежимо мала;
· погрешности измерений первичных параметров независимы.
Измерение координат траектории летательного аппарата фазовыми пеленгаторами
Направляющие косинусы измеряются фазовыми пеленгаторами на основании измерения разности фаз. Разность фаз  равна числу радиоволн, которое укладывается на расстоянии
равна числу радиоволн, которое укладывается на расстоянии  (рис. 8), т.е.
(рис. 8), т.е.  , где
, где  – длина радиоволны.
– длина радиоволны.
|
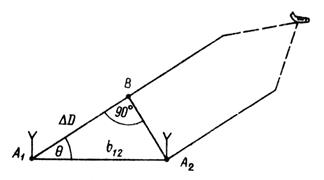
Рис. 8. Принцип работы фазового пеленгатора.
Из треугольника A1BA2 имеем  . Обозначим
. Обозначим  , где Фк – калибровочный коэффициент, равный расстоянию между антеннами A1A2, выраженный в длинах волн. Тогда
, где Фк – калибровочный коэффициент, равный расстоянию между антеннами A1A2, выраженный в длинах волн. Тогда
 .
.
Измерив разность фаз  и зная калибровочный коэффициент Фк, можно определить угол (направляющий косинус) между антенной базой и направлением на летательный аппарат.
и зная калибровочный коэффициент Фк, можно определить угол (направляющий косинус) между антенной базой и направлением на летательный аппарат.
Расчетные формулы для определения координат траектории летательного аппарата при применении фазовых пеленгаторов будут такими же, как и для кинотеодолитов, принимая во внимание, что
При фазометрических измерениях каждый пеленгатор на ИПi и ИПj измеряет направляющие косинусы  . Приняв
. Приняв  , можно получить выражения, определяющие зоны равной точности, в виде:
, можно получить выражения, определяющие зоны равной точности, в виде:
где Bij – величина измерительной базы;  – методические коэффициенты, которые определяются из следующих выражений
– методические коэффициенты, которые определяются из следующих выражений
 – суммарная погрешность, состоящая из составляющих, которые определяются опытным путем или рассчитываются
– суммарная погрешность, состоящая из составляющих, которые определяются опытным путем или рассчитываются
 ,
,
где – разность фаз приходящих радиоволн; – длина радиоволны; –база.
Методическая погрешность зависит от выбора направлений полетов относительно ИП. Рекомендуется выбирать направление полетов перпендикулярно измерительной базе ближе к ее середине. В случае пеленгационного метода невыгодно проводить полеты параллельно измерительной базе.
Характер изменения методических коэффициентов в зависимости от высоты полета летательного аппарата оптимален тогда, когда линии визирования его измерительными средствами пересекаются под прямым углом. Уменьшение этого угла увеличивает методическую погрешность. Поэтому уменьшение погрешности траекторных измерений на больших высотах при заданной величине измерительной базы может быть достигнуто выбором более точных измерительных средств.
Дальномерно–пеленгационный метод основан на измерении дальности (D) и угловых направлений (  ) на летательный аппарат, которые определяют его положение в системе полярных координат. Дальномерно–пеленгационный метод реализуется с помощью радиолокационных станций. Для получения прямоугольных координат полярные координаты летательного аппарата пересчитываются по следующим формулам:
) на летательный аппарат, которые определяют его положение в системе полярных координат. Дальномерно–пеленгационный метод реализуется с помощью радиолокационных станций. Для получения прямоугольных координат полярные координаты летательного аппарата пересчитываются по следующим формулам:
где Di – наклонная дальность от радиолокационной станции до летательного аппарата;  – азимут и угол места летательного аппарата, измеренные радиолокационной станцией.
– азимут и угол места летательного аппарата, измеренные радиолокационной станцией.
Измерения могут быть выполнены с одного измерительного пункта, что является большим преимуществом метода (сокращение количества измерительных пунктов, а, следовательно, упрощение эксплуатации измерительной трассы). Точность измерения координат этим методом не зависит от азимутального направления визирования летательного аппарата, чем облегчается выбор направления их полетов.
Для увеличения точности измерения координат летательного аппарата дальномерно–пеленгационным методом можно дальность измерять радиолокационной станцией, а углы  и
и  , которые радиолокационная станция измеряет со значительными погрешностями, измерять с высокой точностью кинотеодолитами или фазовыми пеленгаторами. В этом случае начало местной системы координат помещают в точку стояния кинотеодолита и пересчитывают дальность, полученную при помощи радиолокационной станции, также в эту точку. Если же в качестве угломерного измерительного средства используется фазовый пеленгатор, то начало местной системы координат помещают в центр его антенного поля.
, которые радиолокационная станция измеряет со значительными погрешностями, измерять с высокой точностью кинотеодолитами или фазовыми пеленгаторами. В этом случае начало местной системы координат помещают в точку стояния кинотеодолита и пересчитывают дальность, полученную при помощи радиолокационной станции, также в эту точку. Если же в качестве угломерного измерительного средства используется фазовый пеленгатор, то начало местной системы координат помещают в центр его антенного поля.
При небольшом удалении летательного аппарата от измерительного пункта (до 100 км) пеленгационным методом можно измерить траекторию летательного аппарата точнее, чем дальномерно–пеленгационным. Однако на больших удалениях летательного аппарата от измерительного пункта точность измерения координат траектории пеленгационным методом резко уменьшается. Значительным преимуществом дальномерно–пеленгационного метода является его однопунктность.
Погрешности измерения прямоугольных координат  радиолокационной станцией пропорциональны погрешностям в измерении углов
радиолокационной станцией пропорциональны погрешностям в измерении углов  ,
,  , дальности
, дальности  и зависят от положения летательного аппарата относительно радиолокационной станции.
и зависят от положения летательного аппарата относительно радиолокационной станции.
Формулы для расчета кривых точности измерения координат при дальномерно–пеленгационном методе имеют вид:
Для координаты z кривые равной точности измерения могут быть получены, если кривые для координаты х повернуть на 90° относительно оси OY.
Кривые равной точности измерения координаты у (высоты) являются окружностями, центром которых будет местоположение радиолокационной станции С, а радиусом –
При построении кривых принимают  и
и  не зависят от дальности.
не зависят от дальности.
При значительном удалении летательного аппарата от радиолокационной станции кривые равной точности из окружностей вырождаются в прямые линии.
Применяемые на измерительных трассах измерительные средства (кинотеодолиты, фазовые пеленгаторы, радиолокационные станции) дают возможность по измеренным первичным параметрам непосредственно получить координаты траектории летательного аппарата. Данные о его скорости и ускорении получаются аппаратурным путем или путем численного дифференцирования координат. При таком методе определения скорости летательного аппарата возникают погрешности, зависящие, главным образом, от степени полинома, аппроксимирующего рассматриваемый участок траектории. В большинстве случаев удовлетворительные результаты получают при аппроксимации траектории полиномом 2–3-го порядка. Только в редких случаях, когда траектория значительно изменяется по времени, степень полинома повышают до 6-го порядка. Алгоритмы и программы для определения скорости имеются на каждой измерительной трассе.
При размещении измерительных пунктов и измерительных средств на траектории измерительной трассы следует руководствоваться следующими соображениями:
· расположение кинотеодолитов должно предусматривать прямую видимость всей зоны ВПП для обеспечения траекторных измерений во время взлетов и посадок летательных аппаратов, а также тарировок ПВД, когда летательный аппарат летает вдоль ВПП, служащей ему ориентиром;
· кинотеодолиты располагают по обе стороны ВПП (желательно на равных расстояниях) с целью уменьшения методических погрешностей;
· угловые скорости перемещения летательного аппарата относительно измерительного пункта не должны превышать допустимых угловых скоростей отслеживания летательного аппарата кинотеодолитами или фазовыми пеленгаторами, гарантируемых заводом–изготовителем этих измерительных средств;
· длины измерительной базы (Вij) при реализации пеленгационного метода для достижения возможно высокой точности траекторных измерений должны находиться в соответствующем соотношении с высотами полета летательного аппарата;
· расстановка оптических измерительных средств должна учитывать положение солнца (против солнца съемку делать нельзя) в часы, когда необходимо их использование.
Дальность прямой видимости летательного аппарата может быть вычислена по формуле  , км,
, км,
где D – дальность прямой видимости, км; Н – высота полета летательного аппарата, м; h – высота стояния оптического измерительного средства или высота антенны радиолокационной станции, м.
Дальность фотографирования летательного аппарата днем можно грубо принять равной ~ 50 км для летательного аппарата без трассера и ~ 100 км для летательного аппарата с трассером.
Дата добавления: 2020-10-14; просмотров: 606;
Поиск по сайту
Узнать еще
- I. Гидрометаллургические методы
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- II. Виды ионизирующих излучений и единицы измерения ИИ
- II. Методы исследования истории медицины.
- II. Пирометаллургические методы.
- II.II. Репродуктивные методы.
- II.III. Частично - поисковые или эвристические методы.
- II.V. Проблемные методы обучения.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
